







原理
全景拼接是将多幅图像拼接成一幅大尺度图像。同一个相机拍摄空间同一平面的两张图像,这两张图像之间的映射关系可以用投影(透视)变换矩阵(homography矩阵)表示。
基本原理如下:我们假定只包含两个图像,且图像以从左到右的顺序提供。首先读取图像列表,我们使用高斯差分(DoG)关键点检测器和SIFT特征描述子(SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。),得到关键点和特征,通过K邻近算法进行特征匹配,并对原始匹配点进行Lowe比率测试,然后依据至少四个匹配的关键点使用RANSAC算法估计投影变换矩阵,最终将图像经投影变换进行拼接生成全景图。
Lowe比率测试:为了排除因为图像遮挡和背景混乱而产生的无匹配关系的关键点,SIFT的作者Lowe提出了比较最近邻距离与次近邻距离的SIFT匹配方式:取一幅图像中的一个SIFT关键点,并找出其与另一幅图像中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离得到的比率ratio少于某个阈值T,则接受这一对匹配点。因为对于错误匹配,由于特征空间的高维性,相似的距离可能有大量其他的错误匹配,从而它的ratio值比较高。显然降低这个比例阈值T,SIFT匹配点数目会减少,但更加稳定,反之亦然。
Lowe推荐ratio的阈值为0.8,但作者对大量任意存在尺度、旋转和亮度变化的两幅图片进行匹配,结果表明ratio取值在0. 4~0. 6 之间最佳,小于0. 4的很少有匹配点,大于0. 6的则存在大量错误匹配点,所以建议ratio的取值原则如下:
- ratio=0. 4:对于准确度要求高的匹配;
- ratio=0. 6:对于匹配点数目要求比较多的匹配;
- ratio=0. 5:一般情况下。
RANSAC(Random Sample Consensus)即随机采样一致性,该方法是用来找到正确模型来拟合带有噪声数据的迭代方法,它能够找到正确数据点的同时摒弃噪声点。
基本思想如下:
N:样本点个数,K:求解模型需要的最少的点的个数
- 随机采样K个点
- 依据该K个点拟合模型
- 计算其它点到该拟合模型的距离,小于一定阈值当做内点,统计内点个数
- 重复M次,选择内点数最多的模型
- 利用所有的内点重新估计模型(可选)
环境
- python == 3.7
- numpy == 1.21.6
- opencv-python == 3.4.2.17
- opencv-contrib-python == 3.4.2.17
- imutils == 0.5.4
代码
# USAGE
# python stitch.py --first images/imageA.png --second images/imageB.png
# import the necessary packages
from panorama import Stitcher
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-f", "--first", required=True,
help="path to the first image")
ap.add_argument("-s", "--second", required=True,
help="path to the second image")
args = vars(ap.parse_args())
# load the two images and resize them to have a width of 400 pixels
# (for faster processing)
imageA = cv2.imread(args["first"])
imageB = cv2.imread(args["second"])
imageA = imutils.resize(imageA, width=400)
imageB = imutils.resize(imageB, width=400)
# stitch the images together to create a panorama
stitcher = Stitcher()
(result, vis) = stitcher.stitch([imageA, imageB], showMatches=True)
# show the images
cv2.imshow("Image A", imageA)
cv2.imshow("Image B", imageB)
cv2.imshow("Keypoint Matches", vis)
cv2.imshow("Result", result)
cv2.waitKey(0)
# import the necessary packages
import numpy as np
import imutils
import cv2
class Stitcher:
def __init__(self):
# determine if we are using OpenCV v3.X
self.isv3 = imutils.is_cv3()
def stitch(self, images, ratio=0.75, reprojThresh=4.0,
showMatches=False):
# unpack the images, then detect keypoints and extract
# local invariant descriptors from them
(imageB, imageA) = images
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
# match features between the two images
M = self.matchKeypoints(kpsA, kpsB,
featuresA, featuresB, ratio, reprojThresh)
# if the match is None, then there aren't enough matched
# keypoints to create a panorama
if M is None:
return None
# otherwise, apply a perspective warp to stitch the images together
(matches, H, status) = M
result = cv2.warpPerspective(imageA, H,
(imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
# check to see if the keypoint matches should be visualized
if showMatches:
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches,
status)
# return a tuple of the stitched image and the visualization
return (result, vis)
# return the stitched image
return result
def detectAndDescribe(self, image):
# convert the image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# detect and extract features from the image
# FAST and BRIEF
# Initiate FAST detector
# fast = cv2.xfeatures2d.StarDetector_create()
# Initiate BRIEF extractor
# brief = cv2.xfeatures2d.BriefDescriptorExtractor_create()
# find the keypoints with STAR
# kp = fast.detect(img,None)
# compute the descriptors with BRIEF
# (kps, features) = brief.compute(img, kp)
# SIFT
descriptor = cv2.xfeatures2d.SIFT_create()
# SURF
# descriptor = cv2.xfeatures2d.SURF_create()
(kps, features) = descriptor.detectAndCompute(image, None)
# convert the keypoints from KeyPoint objects to NumPy arrays
kps = np.float32([kp.pt for kp in kps])
# return a tuple of keypoints and features即
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB,
ratio, reprojThresh):
# compute the raw matches and initialize the list of actual matches
matcher = cv2.DescriptorMatcher_create("BruteForce")
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
# loop over the raw matches
for m in rawMatches:
# ensure the distance is within a certain ratio of each other
# (i.e. Lowe's ratio test)
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
matches.append((m[0].trainIdx, m[0].queryIdx))
# computing a homography requires at least 4 matches
if len(matches) > 4:
# construct the two sets of points
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# compute the homography between the two sets of points
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC,
reprojThresh)
# return the matches along with the homograpy matrix
# and status of each matched point
return (matches, H, status)
# otherwise, no homograpy could be computed
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# initialize the output visualization image
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# loop over the matches
for ((trainIdx, queryIdx), s) in zip(matches, status):
# only process the match if the keypoint was successfully matched
if s == 1:
# draw the match
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
# return the visualization
return vis
示例
原始图片A:

原始图片B:

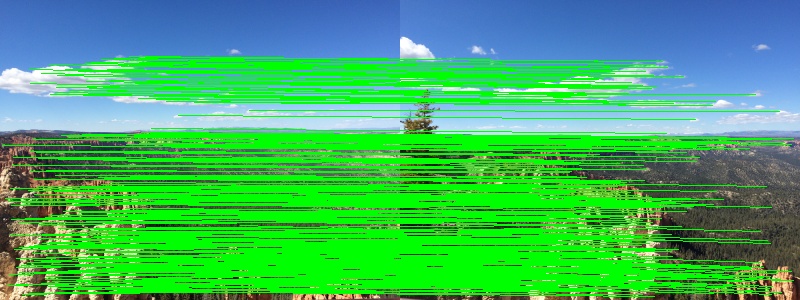
关键点匹配:
全景拼接:

由此图可见,左图为原始图像,右图为经投影变换后的图像。



















 349
349

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











