







 本文深入探讨全景视频拼接关键技术,包括图像拼接步骤、相机标定、图像坐标变换、畸变校正、投影变换、匹配点选取、融合处理以及亮度与颜色均衡。全景视频拼接广泛应用于侦察系统,具有广阔的应用前景。
本文深入探讨全景视频拼接关键技术,包括图像拼接步骤、相机标定、图像坐标变换、畸变校正、投影变换、匹配点选取、融合处理以及亮度与颜色均衡。全景视频拼接广泛应用于侦察系统,具有广阔的应用前景。
全景视频拼接关键技术
一、原理介绍
图像拼接(Image Stitching)是一种利用实景图像组成全景空间的技术,它将多幅图像拼接成一幅大尺度图像或360度全景图,图像拼接技术涉及到计算机视觉、计算机图形学、数字图像处理以及一些数学工具等技术。图像拼接其基本步骤主要包括以下几个方面:摄相机的标定、传感器图像畸变校正、图像的投影变换、匹配点选取、全景图像拼接(融合),以及亮度与颜色的均衡处理等,以下对各个步骤进行分析。
摄相机标定
由于安装设计,以及摄相机之间的差异,会造成视频图像之间有缩放(镜头焦距不一致造成)、倾斜(垂直旋转)、方位角差异(水平旋转),因此物理的差异需要预先校准,得到一致性好的图像,便于后续图像拼接。
相机的运动方式与成像结果之间的关系见下图。
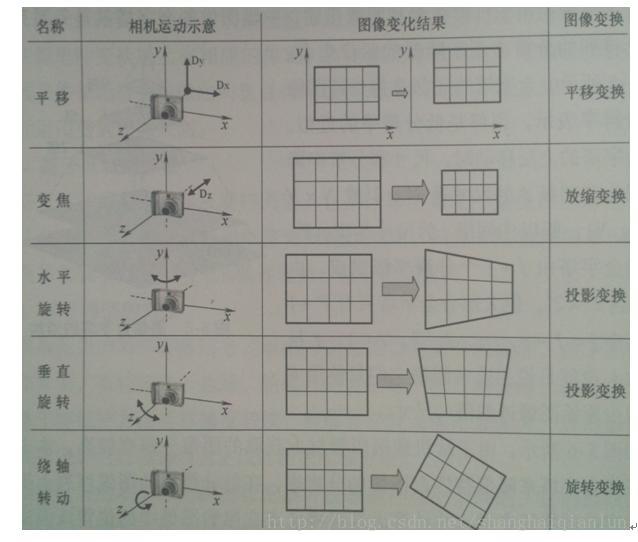
图1:相机的运动方式与成像结果之间的关系
图像坐标变换
在实际应用中,全景图像的获得往往需要摄像机以不同的位置排列和不同的倾角拍摄。例如由于机载或车载特性,相机的排列方式不尽相同,不能保证相机在同一面上,如柱面投影不一定在同一个柱面上,平面投影不一定在同一平面上;另外为了避免出现盲区,相机拍摄的时候往往会向下倾斜一定角度。这些情况比较常见,而且容易被忽略,直接投影再拼接效果较差。因而有必要在所有图像投影到某个柱面(或平面)之前,需要根据相机的位置信息和角度信息来获得坐标变换后的图像。
理论上只要满足静止三维图像或者平面场景的两个条件中的任何一个,两幅图像的对应关系就可以用投影变换矩阵表示,换句话说只要满足这其中任何一个条件,一个相机拍摄的图像可以通过坐标变换表示为另一个虚拟相机拍摄的图像。
一般情况下8参数的透视投影变换最适合描述图像之间的坐标关系,其中8参数的矩阵为[m0,m1,m2;m3,m4,m5; m6,m7,1];各参数对应的相机运动表示如下:


 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 757
757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









