






问题
运行 orbslam3 有一定概率出现如下错误,在单目和 ros 单目模式中都出现过:
Sophus ensure failed in function 'static Sophus::SO3<Scalar_> Sophus::SO3<Scalar_, Options>::expAndTheta(const Tangent&, Sophus::SO3<Scalar_, Options>::Scalar*) [with Scalar_ = float; int Options = 0; Sophus::SO3<Scalar_, Options>::Tangent = Eigen::Matrix<float, 3, 1>; Sophus::SO3<Scalar_, Options>::Scalar = float]', file '/opt/ros/melodic/include/sophus/so3.hpp', line 566.
SO3::exp failed! omega: -nan -nan -nan, real: -nan, img: -nan
一旦出现该错误,就会导致 orbslam 程序崩溃。
解决尝试
解决方案来源:Solving Sophus -nan error:https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/608
修改 1
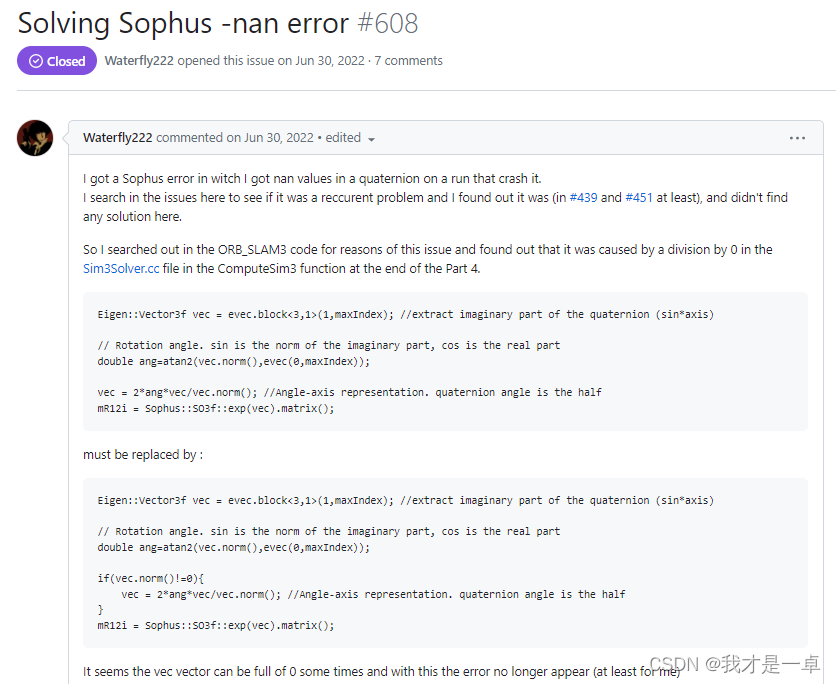
即在 Sim3Solver.cc 存在一处可能除 0 的地方,随后会导致 Sophus::SO3f::exp() 函数报错
Eigen::Vector3f vec = evec.block<3,1>(1,maxIndex); //extract imaginary part of the quaternion (sin*axis)
// Rotation angle. sin is the norm of the imaginary part, cos is the real part
double ang=atan2(vec.norm(),evec(0,maxIndex));
vec = 2*ang*vec/vec.norm(); //Angle-axis representation. quaternion angle is the half
mR12i = Sophus::SO3f::exp(vec).matrix();
应该修改为
Eigen::Vector3f vec = evec.block<3,1>(1,maxIndex); //extract imaginary part of the quaternion (sin*axis)
// Rotation angle. sin is the norm of the imaginary part, cos is the real part
double ang=atan2(vec.norm(),evec(0,maxIndex));
if(vec.norm()!=0){
vec = 2*ang*vec/vec.norm(); //Angle-axis representation. quaternion angle is the half
}
mR12i = Sophus::SO3f::exp(vec).matrix();
修改 2

在 ImuTypes.cc 中 GetDeltaRotation() 函数内
Eigen::Matrix3f Preintegrated::GetDeltaRotation(const Bias &b_)
{
std::unique_lock<std::mutex> lock(mMutex);
Eigen::Vector3f dbg;
dbg << b_.bwx-b.bwx,b_.bwy-b.bwy,b_.bwz-b.bwz;
return NormalizeRotation(dR * Sophus::SO3f::exp(JRg * dbg).matrix());
}
修改为
Eigen::Matrix3f Preintegrated::GetDeltaRotation(const Bias &b_)
{
std::unique_lock<std::mutex> lock(mMutex);
Eigen::Vector3f dbg;
dbg << b_.bwx-b.bwx,b_.bwy-b.bwy,b_.bwz-b.bwz;
if(dbg.array().isNaN()[0]){
dbg = Eigen::Vector3f(0,0,0)
}
return NormalizeRotation(dR * Sophus::SO3f::exp(JRg * dbg).matrix());
}
备注
以上两处修改仅修复了 orbslam3 中两处可能导致 Sophus::SO3f::exp() 函数报错的地方,根据其他开发者反馈,仍有可能继续出现该报错。















 4944
4944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









