







文章目录
一、理论基础
1、白骨顶鸡优化算法
白骨顶鸡优化算法(Coot optimization algorithm, COOT)由Iraj Naruei等人于2021年提出的一种新型启发式算法,其灵感来源于白骨顶鸡在水面上的两种不同运动模式。
在该算法中,作者主要模拟了随机运动和同步运动,并将这两种运动模拟为算法中的三种行为,即:个体随机运动、链式运动、最优个体引导运动。
1.1 个体随机运动
为了实现这一运动,考虑在搜索空间中根据式(1)的随机位置,并将白骨顶鸡移动到这个随机位置。 Q = r a n d ( 1 , d ) . ∗ ( u b − l b ) + l b (1) Q=rand(1,d).*(ub-lb)+lb\tag{1} Q=rand(1,d).∗(ub−lb)+lb(1)这种行为探索了搜索空间的不同部分。如果算法陷入局部最优,该行为将会使得算法跳出局部最优。鸡的新位置根据式(2)计算。 C o o t P o s ( i ) = C o o t P o s ( i ) + A × R 2 × ( Q − C o o t P o s ( i ) ) (2) CootPos(i)=CootPos(i)+A\times R_2\times(Q-CootPos(i))\tag{2} CootPos(i)=CootPos(i)+A×R2×(Q−CootPos(i))(2)其中, R 2 R_2 R2是 [ 0 , 1 ] [0,1] [0,1]区间中的随机数, a a a根据式(3)计算。 A = 1 − L × ( 1 I t e r ) (3) A=1-L\times\left(\frac{1}{Iter}\right)\tag{3} A=1−L×(Iter1)(3)其中, L L L是当前迭代次数, I t e r Iter Iter是最大迭代次数。
1.2 链式运动
两个个体的平均位置可用于实现链式运动。另一种实现链式运动的方法是:首先计算两个个体之间的距离向量,然后将其中一个个体向另一个个体移动大约距离向量的一半。本文使用了第一种方法,并根据式(4)计算出个体的新位置。 C o o t P o s ( i ) = 0.5 × ( C o o t P o s ( i − 1 ) + C o o t P o s ( i ) ) (4) CootPos(i)=0.5\times(CootPos(i-1)+CootPos(i))\tag{4} CootPos(i)=0.5×(CootPos(i−1)+CootPos(i))(4)其中, C o o t P o s ( i − 1 ) CootPos(i-1) CootPos(i−1)是第二个个体。
1.3 最优个体引导运动
1.3.1 根据组长调整位置
通常情况下,小组由小组前面的几只个体领导,其他个体必须根据小组的领导者(即组长)调整自己的位置,并向它们移动。可以考虑领导者的平均位置,种群可以根据该平均位置更新其位置。考虑到平均位置会导致过早收敛,为了实现这一运动,使用式(5)中的机制来选择领导者。
K
=
1
+
(
i
M
O
D
N
L
)
(5)
K=1+(i\,MOD\,NL)\tag{5}
K=1+(iMODNL)(5)其中,
i
i
i是当前个体的位置索引,
N
L
NL
NL是领导者的数量,
K
K
K是领导者的索引。
式(6)根据选定的领导者计算个体的下一个位置。
C
o
o
t
P
o
s
(
i
)
=
L
e
a
d
e
r
P
o
s
(
k
)
+
2
×
R
1
×
cos
(
2
R
π
)
×
(
L
e
a
d
e
r
P
o
s
(
k
)
−
C
o
o
t
P
o
s
(
i
)
)
(6)
CootPos(i)=LeaderPos(k)+2\times R_1\times\cos(2R\pi)\times(LeaderPos(k)-CootPos(i))\tag{6}
CootPos(i)=LeaderPos(k)+2×R1×cos(2Rπ)×(LeaderPos(k)−CootPos(i))(6)其中,
C
o
o
t
P
o
s
(
i
)
CootPos(i)
CootPos(i)是个体的当前位置,
L
e
a
d
e
r
P
o
s
(
k
)
LeaderPos(k)
LeaderPos(k)是选中的领导者位置,
R
1
R_1
R1是
[
0
,
1
]
[0,1]
[0,1]区间中的随机数,
R
R
R是
[
−
1
,
1
]
[-1,1]
[−1,1]区间中的随机数。
1.3.2 领导者引领团队走向最佳区域(领导运动)
团队必须朝着一个目标(最佳区域)前进,因此领导者需要更新它们对目标的位置。在跟随者向领导者靠拢的同时,领导者也要不断地向最优区域靠近。有时,领导者必须离开当前的最佳位置,才能找到更好的位置,有效提升了算法跳出局部最优值的能力。
L
e
a
d
e
r
P
o
s
(
i
)
=
{
B
×
R
3
×
cos
(
2
R
π
)
×
(
g
B
e
s
t
−
L
e
a
d
e
r
P
o
s
(
i
)
)
+
g
B
e
s
t
R
4
<
0.5
B
×
R
3
×
cos
(
2
R
π
)
×
(
g
B
e
s
t
−
L
e
a
d
e
r
P
o
s
(
i
)
)
−
g
B
e
s
t
R
4
≥
0.5
(7)
LeaderPos(i)=\begin{dcases}B\times R_3\times\cos(2R\pi)\times(gBest-LeaderPos(i))+gBest\quad R_4<0.5\\[2ex]B\times R_3\times\cos(2R\pi)\times(gBest-LeaderPos(i))-gBest\quad R_4\geq0.5\end{dcases}\tag{7}
LeaderPos(i)=⎩⎨⎧B×R3×cos(2Rπ)×(gBest−LeaderPos(i))+gBestR4<0.5B×R3×cos(2Rπ)×(gBest−LeaderPos(i))−gBestR4≥0.5(7)其中,
g
B
e
s
t
gBest
gBest是迄今为止发现的最佳位置,
R
3
R_3
R3和
R
4
R_4
R4是
[
0
,
1
]
[0,1]
[0,1]区间中的随机数,
R
R
R是
[
−
1
,
1
]
[−1,1]
[−1,1]区间中的随机数,
B
B
B根据式(8)计算。
B
=
2
−
L
×
(
1
I
t
e
r
)
(8)
B=2-L\times\left(\frac{1}{Iter}\right)\tag{8}
B=2−L×(Iter1)(8)其中,
L
L
L是当前迭代次数,
I
t
e
r
Iter
Iter是最大迭代次数。
2
×
R
3
2×R_3
2×R3产生更大的随机运动,因此算法不会陷入局部最优。这意味着算法在开发阶段也在进行探索。
cos
(
2
R
π
)
\cos(2R\pi)
cos(2Rπ)搜索具有不同半径的最佳个体,以在该个体周围找到更好的位置。
2、COOT算法伪代码
COOT算法伪代码如图1所示。

二、仿真实验与结果分析
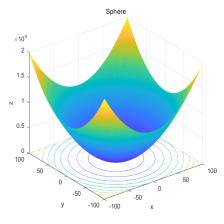
将COOT与SSA、MVO和GWO进行对比,以文献[1]中表1和表2的F1、F3、F4(单峰函数/30维)、F9、F11、F13(多峰函数/30维)为例,实验设置种群规模为30,最大迭代次数为500,每种算法独立运算30次,结果显示如下:






函数:F1
SSA:最差值: 4.3517e-06,最优值:2.6046e-08,平均值:3.0027e-07,标准差:7.8379e-07,秩和检验:3.0199e-11
MVO:最差值: 1.8419,最优值:0.59588,平均值:1.1932,标准差:0.37714,秩和检验:3.0199e-11
GWO:最差值: 4.9496e-27,最优值:2.6417e-29,平均值:1.0244e-27,标准差:1.2287e-27,秩和检验:3.4971e-09
COOT:最差值: 1.2453e-25,最优值:5.921e-46,平均值:4.1784e-27,标准差:2.2731e-26,秩和检验:1
函数:F3
SSA:最差值: 6259.0882,最优值:361.6992,平均值:1836.9734,标准差:1241.9126,秩和检验:3.0199e-11
MVO:最差值: 454.1313,最优值:100.3723,平均值:234.5366,标准差:88.998,秩和检验:3.0199e-11
GWO:最差值: 6.8352e-05,最优值:4.4812e-09,平均值:7.5173e-06,标准差:1.4181e-05,秩和检验:3.0199e-11
COOT:最差值: 2.0864e-18,最优值:4.5224e-52,平均值:6.9547e-20,标准差:3.8092e-19,秩和检验:1
函数:F4
SSA:最差值: 18.1705,最优值:3.4931,平均值:10.9622,标准差:3.8599,秩和检验:3.0199e-11
MVO:最差值: 3.1682,最优值:1.0197,平均值:1.9046,标准差:0.56173,秩和检验:3.0199e-11
GWO:最差值: 5.62e-06,最优值:6.5853e-08,平均值:8.6401e-07,标准差:1.1074e-06,秩和检验:3.0199e-11
COOT:最差值: 5.7662e-11,最优值:2.6987e-23,平均值:2.3332e-12,标准差:1.0601e-11,秩和检验:1
函数:F9
SSA:最差值: 83.5763,最优值:14.9244,平均值:50.8352,标准差:20.3717,秩和检验:4.111e-12
MVO:最差值: 252.2225,最优值:46.3223,平均值:125.0884,标准差:43.268,秩和检验:4.111e-12
GWO:最差值: 76.7443,最优值:5.6843e-14,平均值:6.589,标准差:14.3414,秩和检验:1.5148e-10
COOT:最差值: 3.8654e-12,最优值:0,平均值:2.0274e-13,标准差:7.8121e-13,秩和检验:1
函数:F11
SSA:最差值: 0.049122,最优值:0.00043358,平均值:0.014355,标准差:0.012203,秩和检验:4.111e-12
MVO:最差值: 0.96905,最优值:0.70859,平均值:0.84999,标准差:0.073388,秩和检验:4.111e-12
GWO:最差值: 0.021262,最优值:0,平均值:0.0033834,标准差:0.0069694,秩和检验:0.34456
COOT:最差值: 5.5511e-15,最优值:0,平均值:3.9598e-16,标准差:1.2641e-15,秩和检验:1
函数:F13
SSA:最差值: 50.4004,最优值:0.00027893,平均值:15.1287,标准差:14.3801,秩和检验:1.0188e-05
MVO:最差值: 0.78326,最优值:0.06473,平均值:0.21457,标准差:0.17072,秩和检验:0.00069125
GWO:最差值: 1.5333,最优值:0.20309,平均值:0.62509,标准差:0.30599,秩和检验:0.00076973
COOT:最差值: 2.9726,最优值:0.058763,平均值:0.45485,标准差:0.54704,秩和检验:1
实验结果表明:COOT算法具有良好的性能和竞争力。
三、参考文献
[1] Iraj Naruei, Farshid Keynia. A new optimization method based on COOT bird natural life model[J]. Expert Systems With Applications, 2021, 183: 115352.

















 781
781











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











