







时间:2022年6月26日
Abstract:
- 针对任务:Freespace detection
- 发布越野数据集:ORFD(Off-Road Freespace Detection)
- 数据多样性
Different scence:woodland(林地)、farmland(农田)、grassland(草地)、contryside(乡村)
Different weather conditions:sunny(晴天)、rainy(雨天)、foggy(雾天)、snowy(雪天)
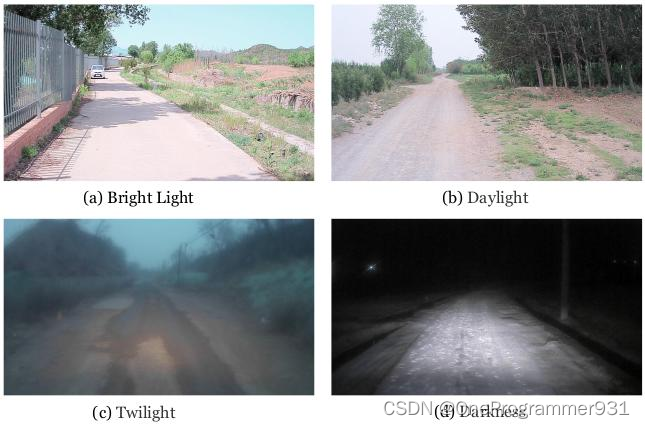
Different light conditions:brightlight(强光)、daylight(白天)、twiliight(黄昏)、darkness(黑夜) - 标注:traversable area、non-traversable area、unreachable area
- 数据多样性
- network:OFF-Net 联合Transformer 结构去聚合局部和全局信息,以满足freespace detection任务对大感受野的要求
Introduction
- Freespace detection task在structured on-road和unstructured off-road场景的区别
对于on-road,Freespace主要指常规的道路区域,但是对于off-road场景,Freespace概念相对模糊。

- ORFD(Off-Road Freespace Detection) datasets
- Different season:spring、summer,、autumn 、winter
Different scence:woodland(林地)、farmland(农田)、grassland(草地)、contryside(乡村)
Different weather conditions:sunny(晴天)、rainy(雨天)、foggy(雾天)、snowy(雪天)
Different light conditions:brightlight(强光)、daylight(白天)、twiliight(黄昏)、darkness(黑夜) - The dataset includes a total of 12, 198 Li-DAR point cloud and RGB image pairs.参照KITTI数据集将激光雷达点云投影到相应的RGB图像平面上,以获得深度信息。
- 提出OFF-Net网络
使用Transformer结构来扩大感受野和捕获上下文信息。
同时提出交叉注意力机制输出modality weights,以帮助动态融合激光雷达点云和RGB图像信息。
Related work
- Datasets
off-road datasets:DeepScence, YCOR, RUGD, RELLIS-3D - Methods
RBNet, TVFNet, LC-CRF, RBANet, PLARD, SNE-RoadSeg
ORFD Dataset
- 数据概述
- scenes

- light conditions
- weather

数据分布:

数据采集地点:中国
数据标注数量:12198张
标注包含激光雷达点云和RGB图像,其中激光雷达点云是40-line,RGB图像大小为1280*720
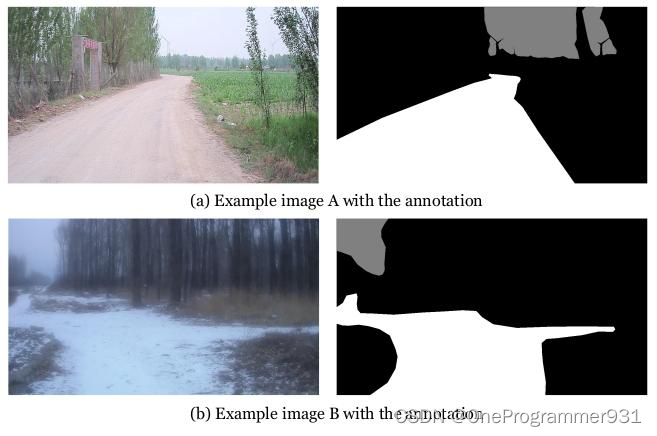
- 数据标注
- 数据标注有三个类,traversable area:白色, non-traversable area:黑色, unreachable area:灰色
- traversable area:在越野场景中,不对自动驾驶汽车的安全造成危险的区域。
- non-traversable area: 场景中对自动驾驶车辆的安全构成威胁的物体组成的区域。
- unreachable area:相对较远的物体组成的区域,它暂时不会对自动驾驶的安全构成威胁。















 906
906











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









