




#LOAM: Lidar Odometry and Mapping in Real-time
Ji Zhang and Sanjiv Singh
在这篇文章我们将学习一下大名鼎鼎的loam并用代码复现他。
摘要
我们的方法实现了低漂移和低计算复杂度,无需高精度测距或惯性测量。获得这一性能水平的关键思想是将同时定位和映射的复杂问题划分为两个算法,这两个算法寻求同时优化大量变量。一种算法以高频率但低保真度执行里程测量,以估计激光雷达的速度。**另一种算法以较低数量级的频率运行,用于点云的精细匹配和配准。**这两种算法的结合允许该方法实时映射/建图。该方法已通过大量实验以及KITTI里程基准进行了评估。结果表明,该方法可以达到最先进的离线批处理方法的精度。
简介
问题:==由于激光雷达存在运动,点云构图会存在失真现象。==我们提出的方法通过两个并行运行的算法来分解问题。里程计算法估计激光雷达的速度并纠正点云中的失真,然后,建图算法匹配并注册点云以创建地图。这两种算法的结合确保了要实时解决的问题的可行性
使用激光雷达的一个关键优势是它对环境光和场景中的光学纹理不敏感。
激光雷达里程计
A.特征点提取
我们选择尖锐边缘和平面曲面片上的特征点。定义一个术语来评估局部表面的平滑度(曲率)。

基于c值对扫描中的点进行排序,然后选择具=有最大c的特征点,即边缘点,以及最小c,即平面点。
在选择特征点时,我们希望避免选择包围点的点,或局部平面上与激光束大致平行的点(图4(a)中的点B)。这些点通常被认为是不可靠的。此外,我们希望避免位于被遮挡区域边界上的点[23]。
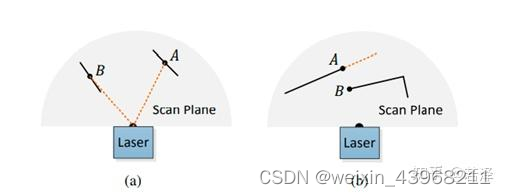
图5显示了从走廊场景中提取的特征点的示例。边缘点和平面点分别以黄色和红色标记。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1210
1210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









