




安装:
尝试vcpkg安装折腾一天失败(之前尝试用vcpkg安装colmap也失败,放弃vcpkg了
参考这个博客,但是附加依赖项没搞对。然后复制了另一个博客的附加依赖项,才解决。
问题还没完,之后报了找不到.dll文件的错,将PCL文件夹里所有dll文件复制到项目文件夹,终于出结果了。
测试代码:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/icp.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in(new pcl::PointCloud<pcl::PointXYZ>(5, 1));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out(new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the CloudIn data
for (auto& point : *cloud_in)
{
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
}
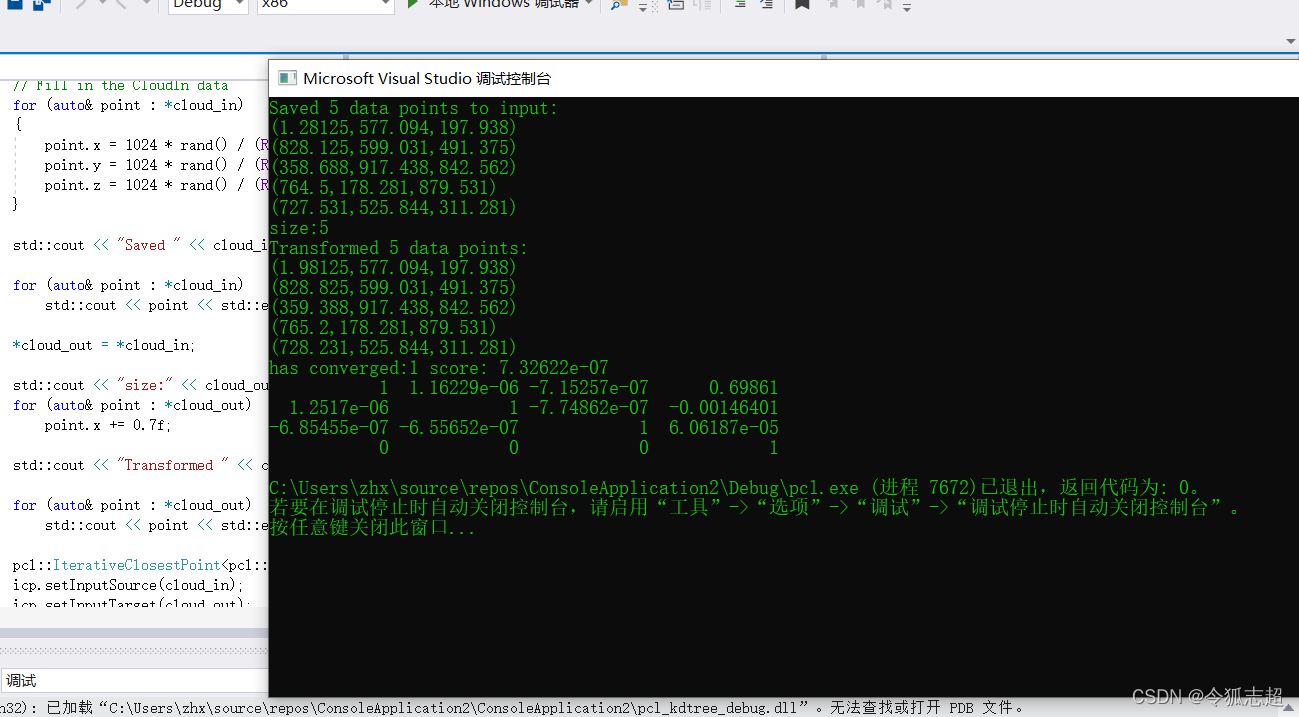
std::cout << "Saved " << cloud_in->size() << " data points to input:" << std::endl;
for (auto& point : *cloud_in)
std::cout << point << std::endl;
*cloud_out = *cloud_in;
std::cout << "size:" << cloud_out->size() << std::endl;
for (auto& point : *cloud_out)
point.x += 0.7f;
std::cout << "Transformed " << cloud_in->size() << " data points:" << std::endl;
for (auto& point : *cloud_out)
std::cout << point << std::endl;
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(cloud_in);
icp.setInputTarget(cloud_out);
pcl::PointCloud<pcl::PointXYZ> Final;
icp.align(Final);
std::cout << "has converged:" << icp.hasConverged() << " score: " <<
icp.getFitnessScore() << std::endl;
std::cout << icp.getFinalTransformation() << std::endl;
return (0);
}

















 31万+
31万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









