







 本文介绍了倒立摆的制作过程,包括使用RisymHT57DJ100步进电机、飞思卡尔MINI1024Z编码器、大疆STM32F427II开发板等硬件,以及keiluVision5、STM32CubeMX和J-Scope等软件工具。
本文介绍了倒立摆的制作过程,包括使用RisymHT57DJ100步进电机、飞思卡尔MINI1024Z编码器、大疆STM32F427II开发板等硬件,以及keiluVision5、STM32CubeMX和J-Scope等软件工具。
闲着没事就开始更新博客了,这次我制作了一个倒立摆,希望能分享给大家–>(lj,tshy,lxy)
首先第一个问题
什么是倒立摆?

这个就是倒立摆了,通过控制步进电机,实现摆垂直于地面。
具体的定义可以百度
1. 选用器材
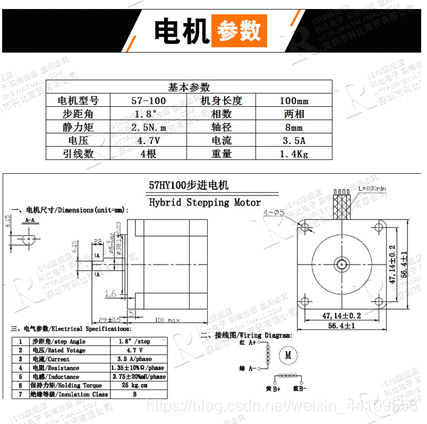
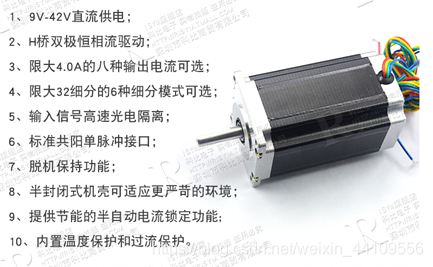
1.Risym HT57DJ100步进电机(带驱动器)
以下是该步进电机的具体参数,在连线和硬件设计时用到

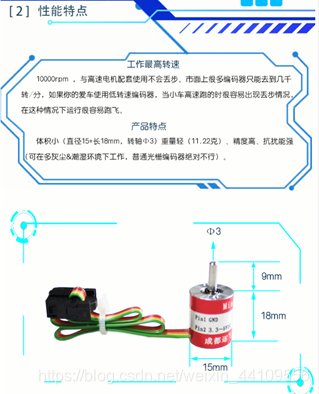
2.飞思卡尔MINI1024Z编码器
以下是该编码器的信息


3.大疆开发STM32F427II
4.大疆24V电源
5.5v继电器
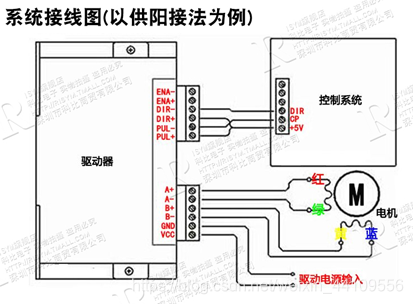
主要是用来步进电机转向的,因为转向需要5v驱动,但是板子IO口最高只能给3.3v,所以此处就加了个继电器来控制,具体原理百度。
1. 使用的程序
1.keil uVision5
一般写stm32代码都用这个
2.STM32CubeMX
快速配置stm32板子的引脚,不用再使用寄存器自己写配置
3.J-Scope
可以用来看单片机变量的波形,主要用于调试
我们所使用的软硬件主要就是以上写的,其余的结构骨架就不细说了

















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









