




 本文介绍了PID神经元网络的结构和控制算法,包括输入层、隐含层和输出层的功能以及控制律计算。通过MATLAB代码展示了如何实现对一个3输入3输出复杂耦合系统的控制,利用梯度修正法动态调整权值以接近控制目标。案例分析显示PID神经元控制器能有效控制多输入多输出系统。
本文介绍了PID神经元网络的结构和控制算法,包括输入层、隐含层和输出层的功能以及控制律计算。通过MATLAB代码展示了如何实现对一个3输入3输出复杂耦合系统的控制,利用梯度修正法动态调整权值以接近控制目标。案例分析显示PID神经元控制器能有效控制多输入多输出系统。
本博客的完整代码获取:https://www.mathworks.com/academia/books/book106283.html
1案例背景
1.1PID 神经元网络结构
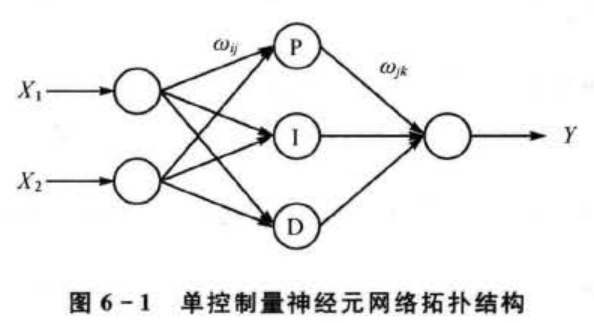
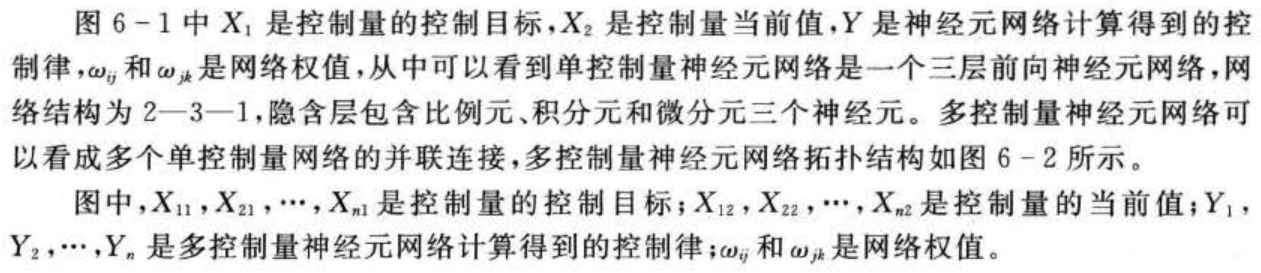
PID神经元网络从结构上可以分为输人层、隐含层和输出层三层,n个控制量的PID神经元网络包含n个并列的相同子网络,各子网络间既相互独立,又通过网络连接权值相互联系。每个子网络的输入层有两个神经元,分别接收控制量的目标值和当前值。每个子网络的隐含层由比例元,积分元和微分元构成,分别对应着PID控制器中的比例控制,积分控制和微分控制。PID神经元网络按被控系统控制量的个数可以分为控制单变量系统的单控制量神经元网络和控制多变量系统的多控制量神经元网络。其中单控制量神经元网络是PID神经元网络的基本形式,多控制量神经元网络可以看成是多个单控制量神经元网络的组合形式。单控制量神经元网络的拓扑结构如图6-1所示。
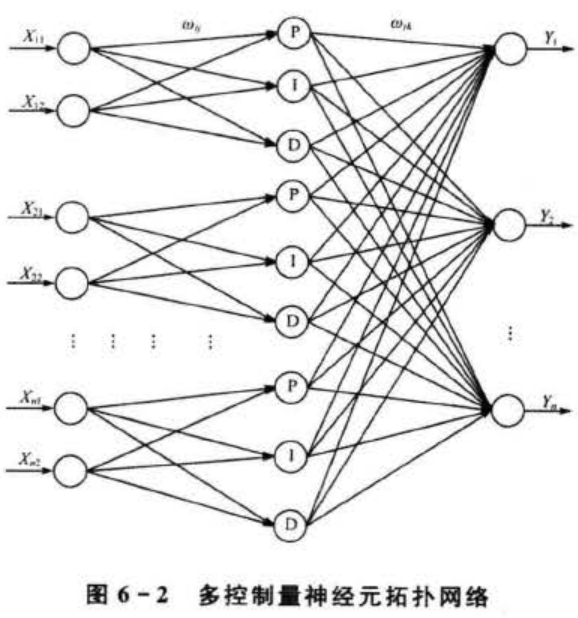
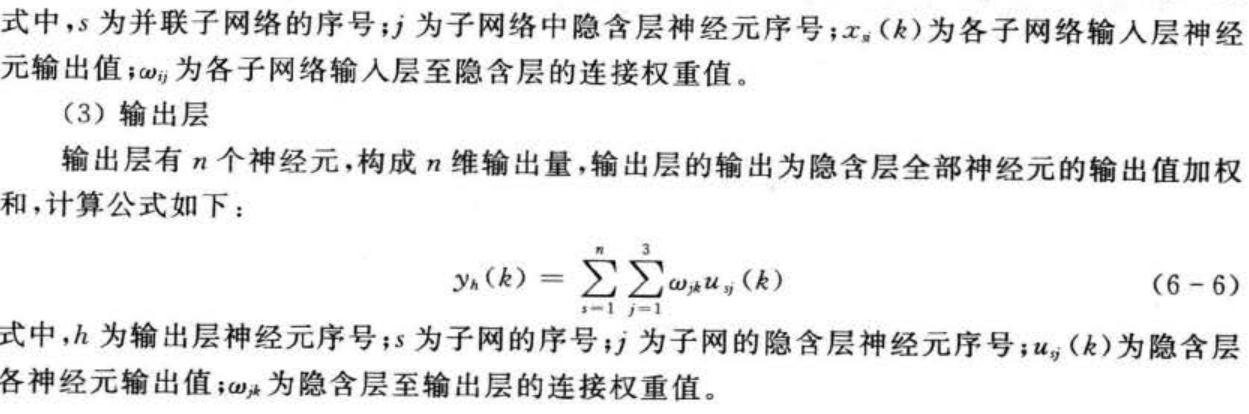
 1.2控制律计算
1.2控制律计算
PID神经元网络分为输入层、隐含层和输出层,网络输入量为控制量当前值和控制目标,输出量为控制律,各层输人输出计算公式如下。
1)输入层


 1.3权值修正
1.3权值修正 1.4 控制对象
1.4 控制对象 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1014
1014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











