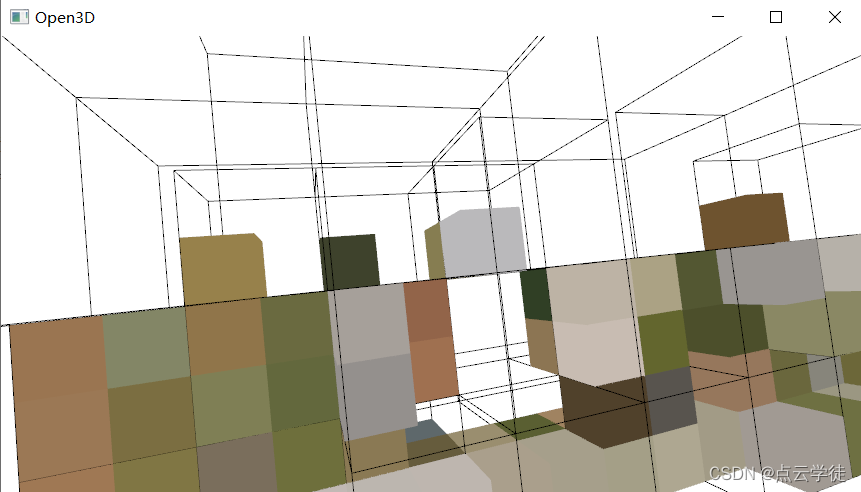
Open3D 从体素网格构建八叉树(14) 一、算法简介 二、算法实现 1.代码 2.效果 一、算法简介 上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。 二、算法实现 1.代码 代码如下(示例): import open3d as o3d import numpy as np # 构建点云对象 pcd = o3d.io.read_point_cloud("D:\\shuju\\简单树木.pcd") # 对点云进行体素化 voxel_grid = o3d.geometry.VoxelGrid.cr








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4549
4549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








