







人体红外模块HC-SR501,HC-SR505的对比与调试
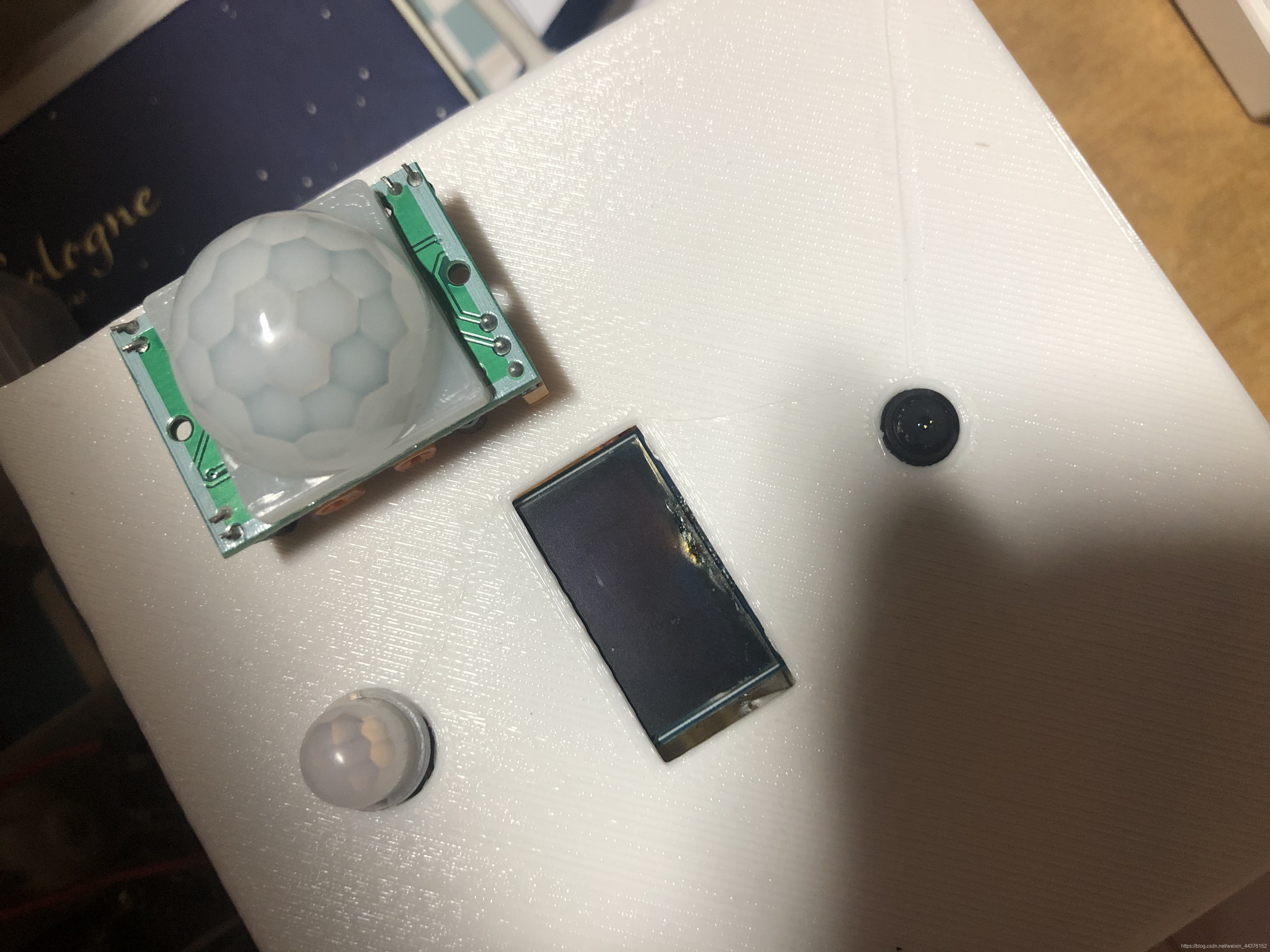
最开始是用501的,但是它一拿到学校就调试不出来了,而且个头大(比我斥巨资买的屏幕还大),综上所述不太适合在我的小模型上使用,换了从别人手上抢来的505,简直,短小精干,而且好调试(可能就是不用调试)。

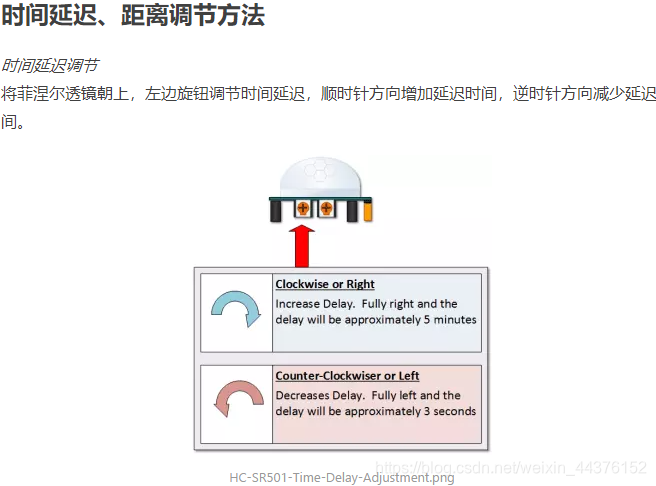
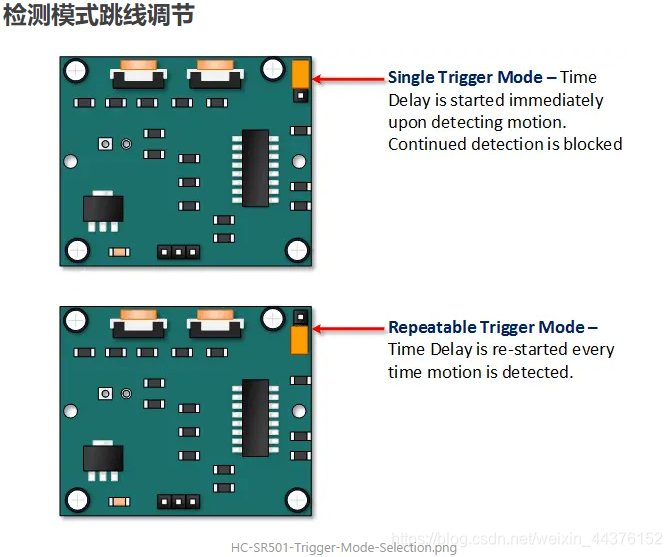
一、HC-SR501基本介绍
本部分为转载某大佬的总结,简直是全网最简单易懂的总结了
> 传送门

二、HC-SR501、HC-SR505 程序驱动部分
这俩兄弟,简直无缝衔接,代码部分似乎可以通用
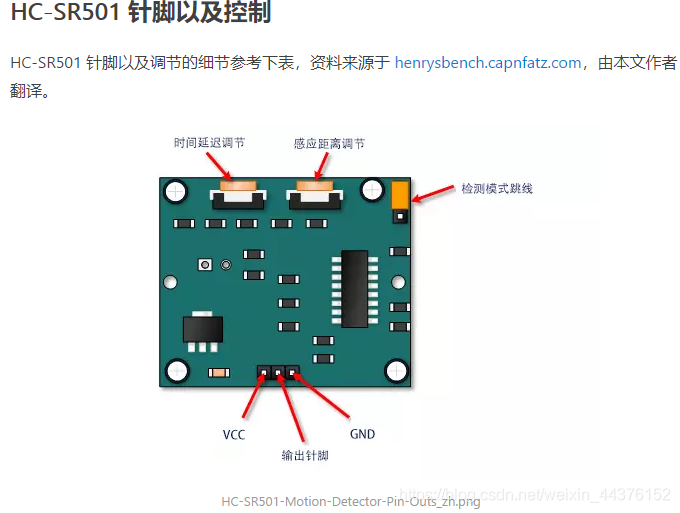
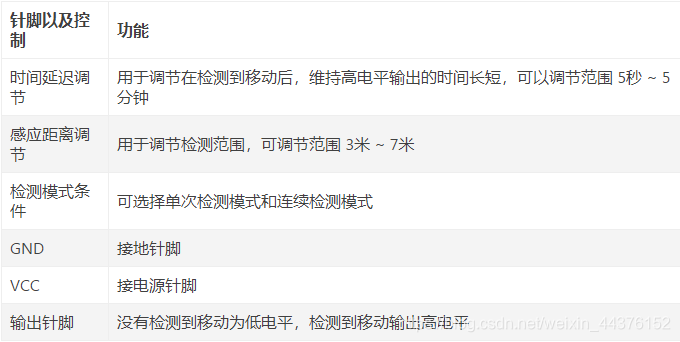
如不会认引脚,可参照传送门的引脚图插线
传送门
import RPi.GPIO as GPIO
import time
def sr501init():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD)
GPIO.setup(32, GPIO.IN) #重点这是OUT端连的引脚,一定不要写错
pass
def ispeople():
if GPIO.input(32) == True:
print("message:" + "have somebody moving")
GPIO.cleanup()
return 1
else:
GPIO.cleanup()
#print("message:" + "no somebody moving")
return 0
#time.sleep(0.5) //测试代码
#sr501init()
#for j in range(1,500):
#time.sleep(3)
#print(j)
#ispeople()
#ispeople()
#GPIO.cleanup()


















 2815
2815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











