






最近在看自动驾驶的面试题,有一题问三维旋转框的IoU计算方式,在csdn博客上看到此代码,但是没有解读,遂记录如下。3D IoU框的计算有如下的步骤:
- 计算高度的重叠部分,boxes_height先计算最高处与最低处。(z轴坐标±高度的一半)
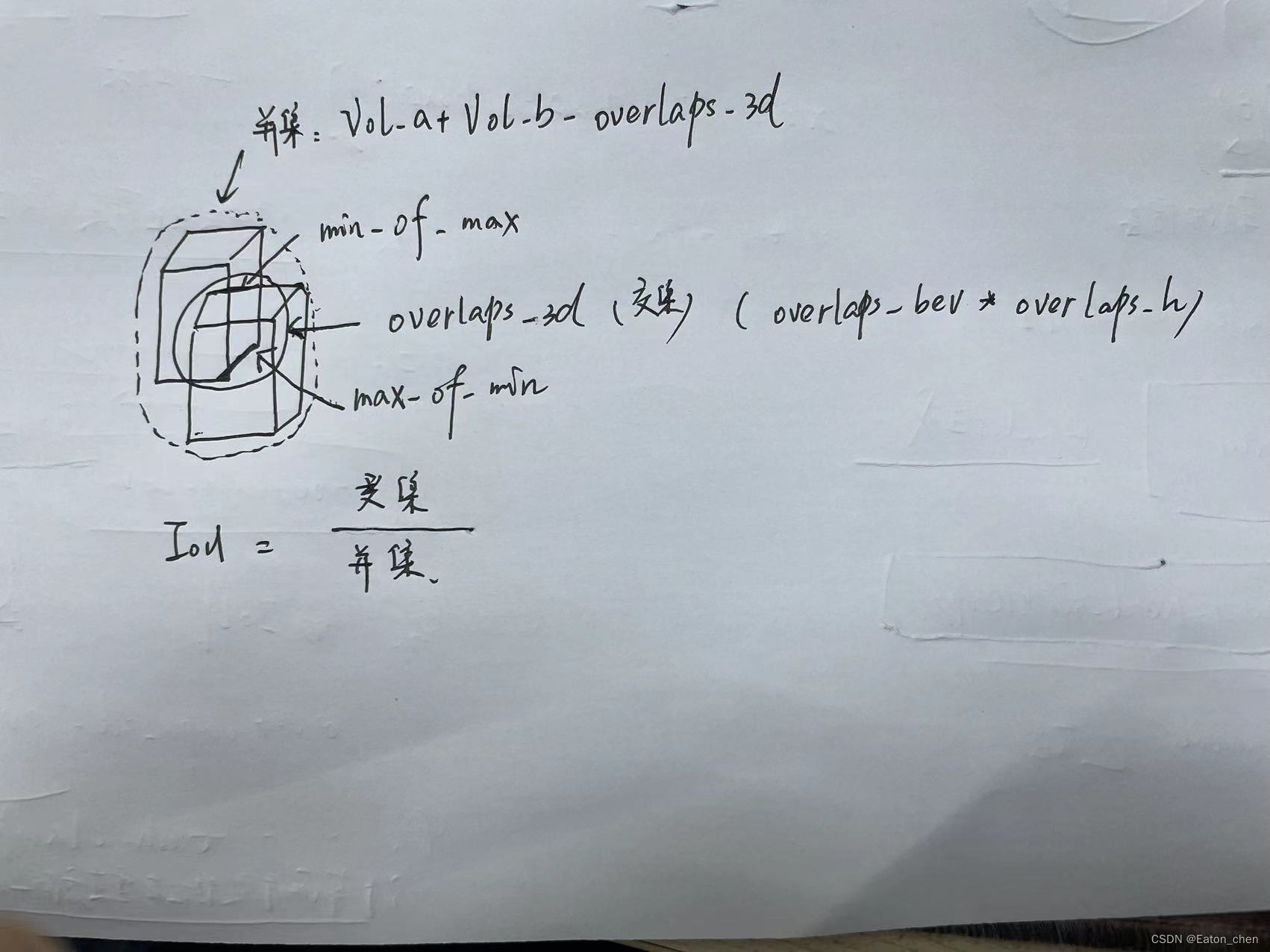
- overlaps_h(height)存储高度重叠结果:min_of_max-max_of_min
- 计算水平方向的重叠部分,调用iou3d_nms_cuda.boxes_overlap_bev_gpu这个函数
- 计算overlaps_3d=水平重叠*高度重叠(交集)
- 无论是2D框还是3D框,计算公式都是 IoU=框的交集/框的并集,所以下一步计算框的并集
- 框的并集=两个框的体积之和(vol_a,vol_b)-重叠部分(overlaps_3d)
- 最后计算IoU_3d: iou3d = overlaps_3d / torch.clamp(vol_a + vol_b - overlaps_3d, min=1e-6)
大致示意图如下,画的不好,博主画工不大行…
具体代码如下,请对照阅读。
# 3D IOU 计算
def boxes_iou3d_gpu(boxes_a, boxes_b):
"""
Args:
boxes_a: (N, 7) [x, y, z, dx, dy, dz, heading]
boxes_b: (N, 7) [x, y, z, dx, dy, dz, heading]
Returns:
ans_iou: (N, M)
"""
assert boxes_a.shape[1] == boxes_b.shape[1] == 7
# height overlap
# 最高:z轴坐标+高度的一半
boxes_a_height_max = (boxes_a[:, 2] + boxes_a[:, 5] / 2).view(-1, 1)
# 最低:z轴坐标-高度的一半
boxes_a_height_min = (boxes_a[:, 2] - boxes_a[:, 5] / 2).view(-1, 1)
boxes_b_height_max = (boxes_b[:, 2] + boxes_b[:, 5] / 2).view(1, -1)
boxes_b_height_min = (boxes_b[:, 2] - boxes_b[:, 5] / 2).view(1, -1)
# bev overlap
overlaps_bev = torch.cuda.FloatTensor(torch.Size((boxes_a.shape[0], boxes_b.shape[0]))).zero_() # (N, M)
# 调用函数计算bev的overlap
iou3d_nms_cuda.boxes_overlap_bev_gpu(boxes_a.contiguous(), boxes_b.contiguous(), overlaps_bev)
# 选择两个框中的最低处的更高的位置
max_of_min = torch.max(boxes_a_height_min, boxes_b_height_min)
# 选择两个框中的最高处的更低的位置
min_of_max = torch.min(boxes_a_height_max, boxes_b_height_max)
# 计算垂直方向上的高度重叠部分
overlaps_h = torch.clamp(min_of_max - max_of_min, min=0)
# 3d iou 水平*高度重叠部分
overlaps_3d = overlaps_bev * overlaps_h
# 计算两个框的体积
vol_a = (boxes_a[:, 3] * boxes_a[:, 4] * boxes_a[:, 5]).view(-1, 1)
vol_b = (boxes_b[:, 3] * boxes_b[:, 4] * boxes_b[:, 5]).view(1, -1)
# 交集除以并集 分母为两个框的体积减去重叠的部分
iou3d = overlaps_3d / torch.clamp(vol_a + vol_b - overlaps_3d, min=1e-6)

















 2539
2539

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









