







平台:树莓派4B
系统版本: 2020-05-27-raspios-buster-arm64.img
一些补充
系统安装参考
【树莓派学习笔记】一、烧录系统、(无屏幕)配置Wifi和SSH服务
【树莓派学习笔记】二、(无屏幕)SSH远程登录、图形界面及系统配置
其中64位的系统可直接使用Debian的镜像源:其中Buster版的见 Debian 10 Buster 国内常用镜像源
实测2020-05-27-raspios-buster-arm64.img版的镜像无法启用自带的VNC,可参考【RK3399Pro学习笔记】一、Thinker Edge R 安装系统和VNC服务来配置。
安装ROS
sudo mkdir -p /etc/apt/sources.list.d/ && sudo touch /etc/apt/sources.list.d/ros-latest.list
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
sudo apt update -y
sudo apt install aptitude
输入sudo aptitude install ros-按住tab补全搜寻有无类似ros-版本代号-desktop-full的安装包,我这里找到了ros-noetic-desktop版本的:
使用如下命令后可能会有不少冲突,尽可能选择安装最全的方案,甚至可能需要安装分几次一部分一部分地安装才能装完。
sudo aptitude install ros-noetic-desktop
初始化rosdep
这里使用鱼香ROS大佬的脚本解决rosdep问题,其官网为鱼香ROS
wget http://fishros.com/install -O fishros && . fishros
选择3

rosdepc update
wget http://fishros.com/install -O fishros && . fishros
测试
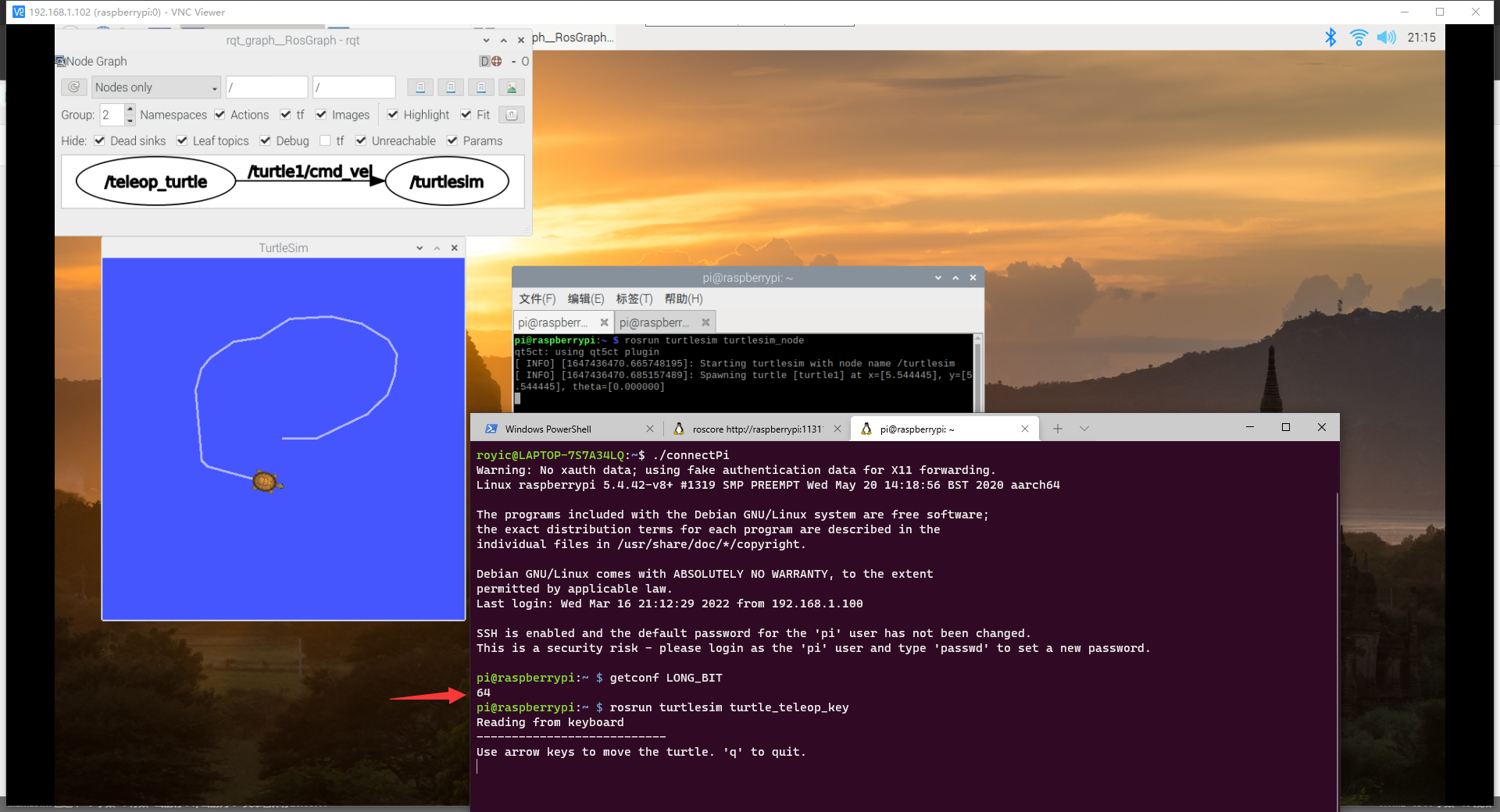
分别在四个终端中使用如下命令
roscore
rosrun turtlesim turtle_teleop_key
以下这个命令需在图形界面的终端中使用
rosrun turtlesim turtlesim_node
rqt_graph
如图所示,已成功运行小乌龟例程
















 1994
1994











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











