







参考资料
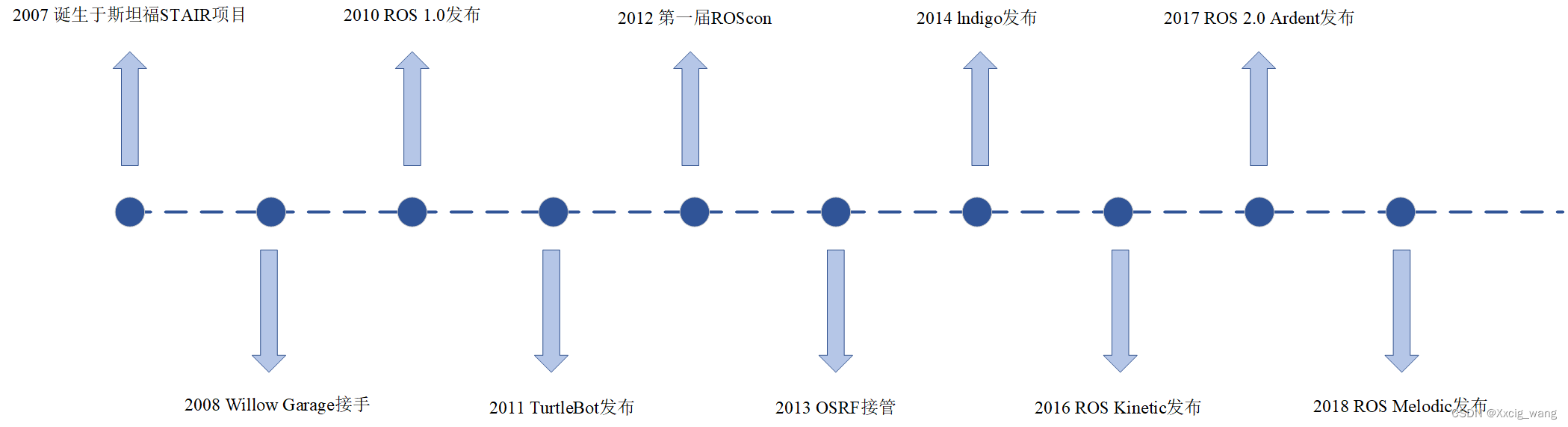
ROS发展与现状
 ROS社区内的功能包数量、关注度、相关文章均呈指数级上涨。
ROS社区内的功能包数量、关注度、相关文章均呈指数级上涨。
微软将ROS引入Windows 10,支持基于硬件加速的Windows机器学习、Azure Cognitive服务、Azure loT云服务、Visual Studio等。
AWS RoboMaker扩展了ROS功能,可以轻松实现大规模开发、测试和部署智能机器人应用程序,可连接到云服务。
Powering the world’s robots! – 机器人领域的普通标准
课程内容提要
适用人群
- 希望全面了解ROS机器人开发的相关技术的入门者。
- 渴望掌握ROS机器人开发原理,不满足于重复造轮子式开发的机器人工程师。
- 希望借助开源力量提高机器人开发效率和创新功能的研究者。
课程大纲
- 课程介绍
- ROS发展与现状
- 课程内容提要
- 开课前准备
- 认识ROS
- ROS的定义与核心概念
- ROS通信机制介绍
- 第一个ROS例程 – 小海龟仿真分析
- ROS通信编程
- ROS项目开发流程
- ROS Topic通信编程
- ROS Service通信编程
- ROS常用组件工具
- Launch启动文件
- TF坐标变换
- 可视化显示与仿真工具
- URDF机器人建模
- 机器人的定义与组成
- URDF建模方法
- URDF机器人模型案例分析
- 构建机器人仿真平台
- 创建仿真环境
- ROS中的控制器插件
- 实现机器人及传感器的仿真
- 机器视觉处理
- ROS摄像头驱动及数据接口
- 摄像头参数标定
- 物体识别案例及源码分析
- 机器人语音交互
- 机器人语音识别
- 中英文语音输出
- 机器人语音交互案例分析
- 机器人SLAM建图
- SLAM原理简介
- 常用二维SLAM功能包的使用方法
- 常用三维SLAM功能包的使用方法
- 机器人自主导航
- ROS中的导航框架
- 导航框架中的关键功能包
- 机器人自主导航案例分析
- 机器人综合应用 – “迷宫寻宝”
- “迷宫寻宝”的关键技术
- “迷宫寻宝”的实现框架和方法
- 课程总结
- 课程总结
- 进阶学习攻略
开课前准备
- 安装Ubuntu20.04系统Ubuntu镜像下载地址。
- 安装ROS noetic。
- 参考ROS Wiki。
结语
怕什么真理无穷,进一寸有一寸的欢喜!!!














 621
621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









