







ROS是什么
一、总体设计
一个目标——提高机器人研发中的软件复用率
五个特点——点对点设计、多语言支持、架构精简集成度高、组件化工具包丰富、免费且开源
1、 点对点设计——节点单元、分布式网络、RPC+TCP/UDP通信系统、适合多级协同
2、多语言支持——支持各类编程语言、语言无关接口定义
3、架构精简集成度高——每个功能节点可以单独编译、集成真多开源项目、接口统一提高软件复用性
4、组件化工具包丰富——3D可视化工具rviz、物理仿真环境gazabo、数据记录工具rosbag、Qt工具箱rqt_*
5、免费且开源——BSD许可(可修改、可复用、可商用)、软件包数量指数级增加,良好的生态系统
四位一体——通信机制(点对点)+开发工具+应用功能+生态系统
二、系统实现
三个层次
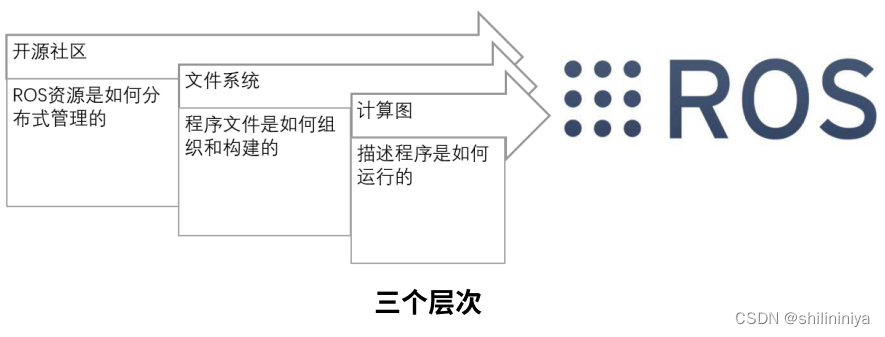
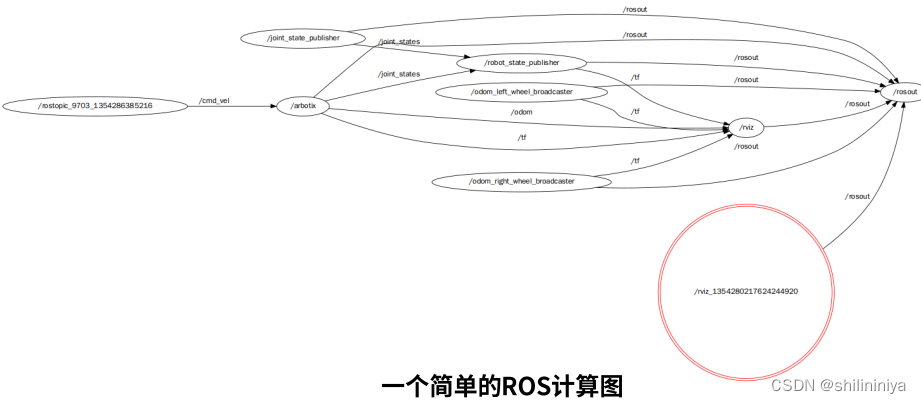
计算图
整个系统的软件模块均是以节点为单位独立运行的,可以分布于一个或多个主机当中去。当系统运行时,通过端到端的拓扑结构来进行连接。
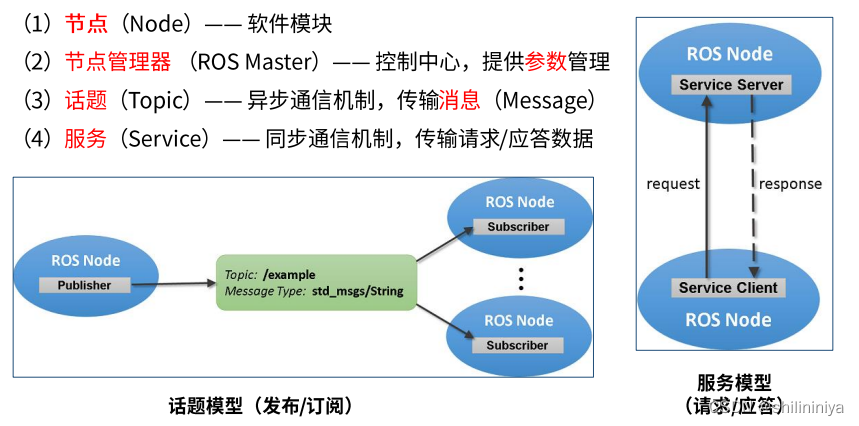
节点:一些执行运算任务的进程。
节点管理器:可以记录每一个节点注册的信息,帮助节点互相查找,建立连接。为整个系统提高种全局参数的保存机制,也就是参数服务器。
话题:节点之间最重要的通信也就是基于发布和订阅的话题模型,通讯的数据我们称之为消息。
服务:双向的同步通信机制,基于请求和应答的服务模型。
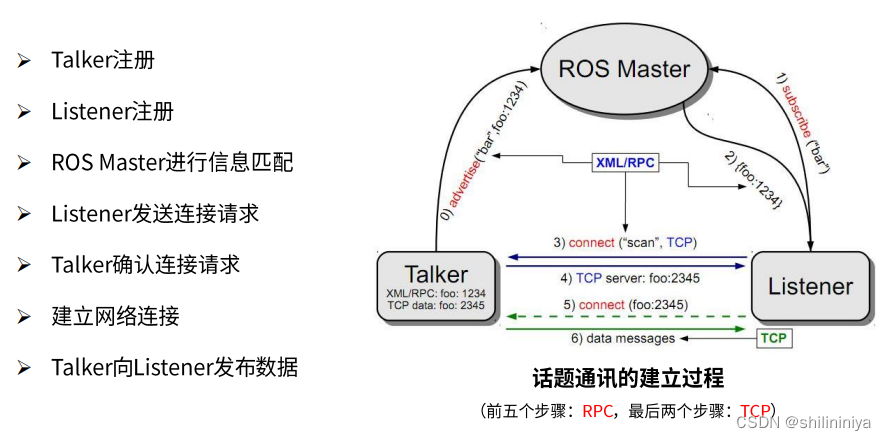
话题通信机制
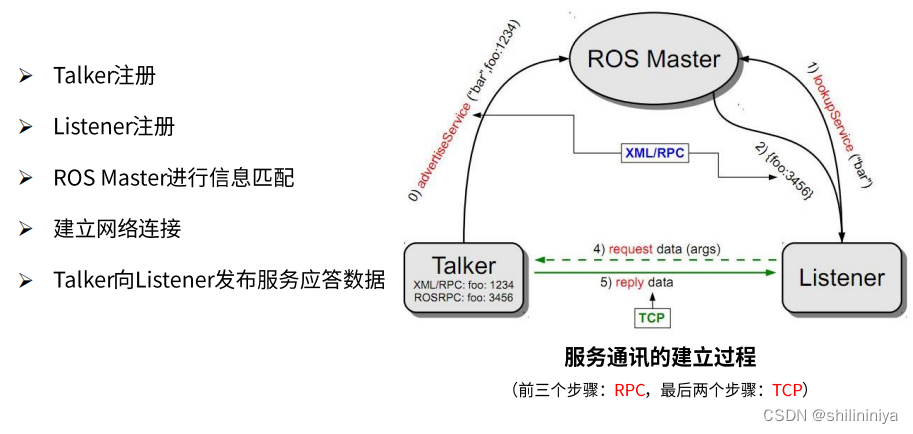
话题通讯使用最为频繁,也最为复杂。talker为话题的发布者,linstener为话题的接收端,没有强制要求启动顺序。
若talker先启动,通过一个端口注册信息发送到ROS Master端同时ROS Master端会将注册信息加入注册列表中。listener注册也会将注册信息发送到ROS Master端。
ROS Master根据注册信息来进行匹配,若没有匹配到就继续等待,若匹配成功则将talker的地址发送给listener。listener接收到以后将会发送连接请求,将需要订阅的话题名和通讯协议,talker确认连接请求返还请求信息,包括TCP的地址。接下来通过三次握手建立网络连接。
前面五个步骤均使用的是RPC协议,最后建立连接以后使用的是TCP协议来完成数据的传输。
服务通信机制
与话题通信相比,减少了talker和listener之间的RPC通讯,TCP通讯增加了请求和应答的过程
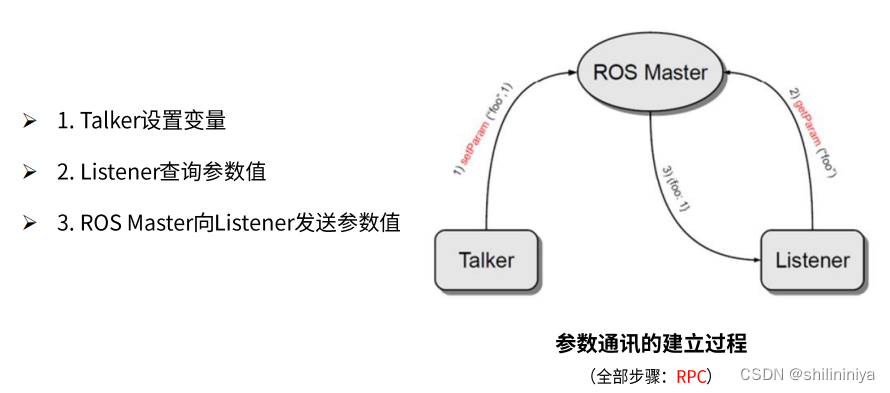
 参数通信机制
参数通信机制
类似于全局变量的概念,全部通过RPC协议来讲数据保存或发布,talker更新了参数值而listener未重新查询的话,是不会察觉参数发生了变化的。——有一种动态参数更新的机制加以解决
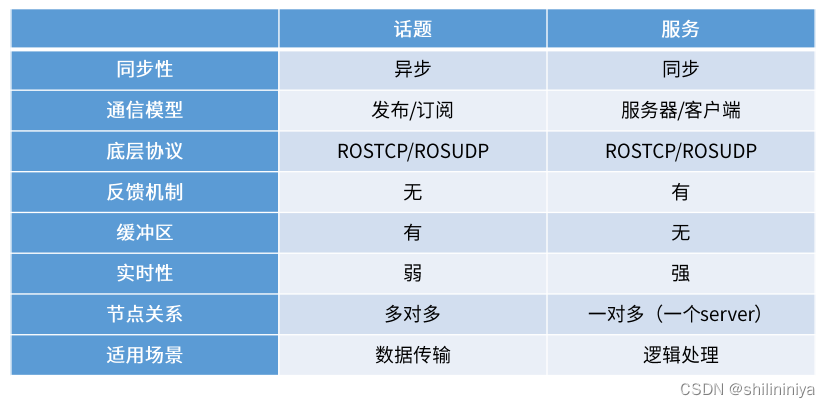
话题和服务的区别:
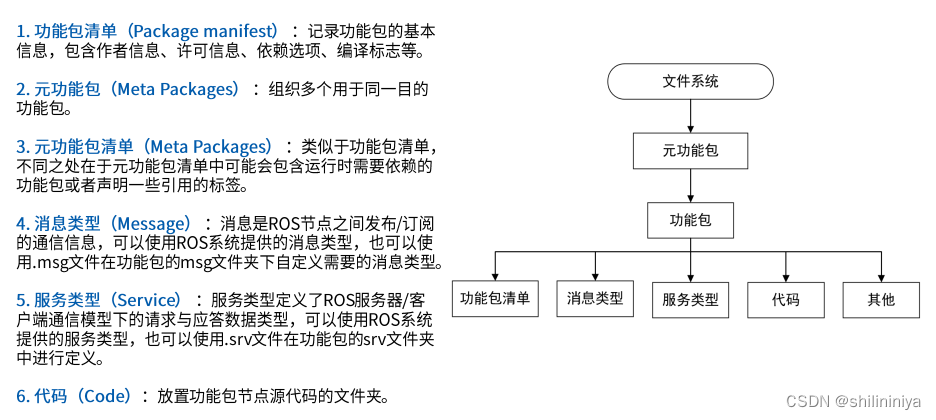
 文件系统——不同功能的文件会存放在不同的文件夹下
文件系统——不同功能的文件会存放在不同的文件夹下
三、初次实践


















 490
490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









