







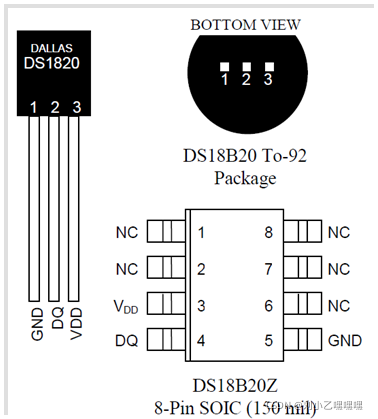
一、DS18B20性能特征
- ①、独特的单总线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。大大提高了系统的抗干扰性。
- ② 、测温范围 -55℃~+125℃,精度为±0.5℃。
- ③、支持多点组网功能,多个DS18B20可以并联在唯一的三线上,最多只能并联8个,实现多点测温,如果数量过多,会使供电电源电压过低,从而造成信号传输的不稳定。
- ④、 工作电源: 3.0~5.5V/DC (可以数据线寄生电源)。
- ⑤ 、在使用中不需要任何外围元件。
- ⑥、 测量结果以9~12位数字量方式串行传送。
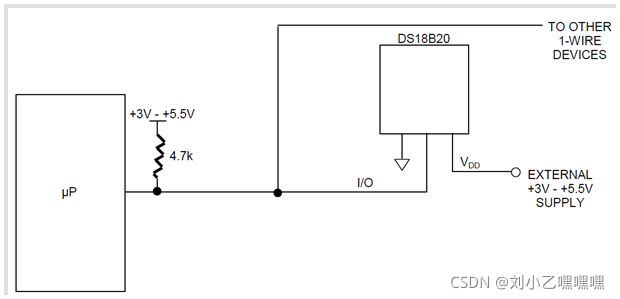
二、接线方式
三、信号类型
DS18B20共有6种信号类型:复位脉冲、应答脉冲、写0、写1、读0和读1。所有这些信号,除了应答脉冲以外,都由主机发出同步信号。并且发送所有的命令和数据都是字节的低位在前。
1、复位信号
单总线上的所有通信都是以初始化序列开始。主机输出低电平,保持低电平时间至少480 us,,以产生复位脉冲。接着主机释放总线,4.7K的上拉电阻将单总线拉高,延时15~60 us,并进入接收模式(Rx)。接着DS18B20拉低总线60~240 us,以产生低电平应答脉冲。
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //设置为输出模式
DS18B20_DQ_OUT=0; //拉低DQ
delay_us(750); //拉低750us(至少480us)
DS18B20_DQ_OUT=1; //DQ=1拉高释放总线
delay_us(15); //15US
//进入接受模式,等待应答信号。
}
2、应答信号
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在 返回0:存在
u8 DS18B20_Check(void)
{
u8 retry=0;
DS18B20_IO_IN();//SET PA0 INPUT
while (DS18B20_DQ_IN&&retry<200)
{
retry++;
delay_us(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN&&retry<240)
{
retry++;
delay_us(1);
};
if(retry>=240)return 1;
return 0;
}
3、写时序
写时序包括写0时序和写1时序。所有写时序至少需要60us,且在2次独立的写时序之间至少需要1us的恢复时间,两种写时序均起始于主机拉低总线。
- 写1时序:主机输出低电平,延时2us,然后释放总线,延时60us。
- 写0时序:主机输出低电平,延时60us,然后释放总线,延时2us。
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(u8 dat)
{
u8 j; u8 testb;
DS18B20_IO_OUT();//设置PA0为输出
for (j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb) //输出高
{
DS18B20_DQ_OUT=0;// 主机输出低电平
delay_us(2); //延时2us
DS18B20_DQ_OUT=1;//释放总线
delay_us(60); //延时60us
}
else //输出低
{
DS18B20_DQ_OUT=0;//主机输出低电平
delay_us(60); //延时60us
DS18B20_DQ_OUT=1;//释放总线
delay_us(2); //延时2us
}
}
}
4、读时序
单总线器件仅在主机发出读时序时,才向主机传输数据,所以,在主机发出读数据命令后,必须马上产生读时序,以便从机能够传输数据。
所有读时序至少需要60us,且在2次独立的读时序之间至少需要1us的恢复时间。每个读时序都由主机发起,至少拉低总线1us。主机在读时序期间必须释放总线,并且在时序起始后的15us之内采样总线状态。
- 典型的读时序过程为:主机输出低电平延时2us,然后主机转入输入模式延时12us,然后读取单总线当前的电平,然后延时50us。
//从DS18B20读取一个位
//返回值:1/0
u8 DS18B20_Read_Bit(void) // read one bit
{
u8 data;
DS18B20_IO_OUT();//设置为输出
DS18B20_DQ_OUT=0; //输出低电平2us
delay_us(2);
DS18B20_DQ_OUT=1; //拉高释放总线
DS18B20_IO_IN();//设置为输入
delay_us(12);//延时12us
if(DS18B20_DQ_IN)data=1;//读取总线数据
else data=0;
delay_us(50); //延时50us
return data;
}
读一个字节数据
//从DS18B20读取一个字节
//返回值:读到的数据
u8 DS18B20_Read_Byte(void) // read one byte
{
u8 i,j,dat;
dat=0;
for (i=1;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
DS18B20典型温度读取过程:复位 --> 发SKIP ROM命令(0XCC)–> 发开始转换命令(0X44)–> 延时 --> 复位 --> 发送SKIP ROM命令(0XCC)–>发读存储器命令(0XBE)–> 连续读出两个字节数据(即温度) --> 结束。
四、代码展示
/复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //SET PG11 OUTPUT
DS18B20_DQ_OUT=0; //拉低DQ
delay_us(750); //拉低750us
DS18B20_DQ_OUT=1; //DQ=1
delay_us(15); //15US
}
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在
//返回0:存在
u8 DS18B20_Check(void)
{
u8 retry=0;
DS18B20_IO_IN();//SET PG11 INPUT
while (DS18B20_DQ_IN&&retry<200)
{
retry++;
delay_us(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN&&retry<240)
{
retry++;
delay_us(1);
};
if(retry>=240)return 1;
return 0;
}
//从DS18B20读取一个位
//返回值:1/0
u8 DS18B20_Read_Bit(void) // read one bit
{
u8 data;
DS18B20_IO_OUT();//SET PG11 OUTPUT
DS18B20_DQ_OUT=0;
delay_us(2);
DS18B20_DQ_OUT=1;
DS18B20_IO_IN();//SET PG11 INPUT
delay_us(12);
if(DS18B20_DQ_IN)data=1;
else data=0;
delay_us(50);
return data;
}
//从DS18B20读取一个字节
//返回值:读到的数据
u8 DS18B20_Read_Byte(void) // read one byte
{
u8 i,j,dat;
dat=0;
for (i=1;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(u8 dat)
{
u8 j;
u8 testb;
DS18B20_IO_OUT();//SET PG11 OUTPUT;
for (j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb)
{
DS18B20_DQ_OUT=0;// Write 1
delay_us(2);
DS18B20_DQ_OUT=1;
delay_us(60);
}
else
{
DS18B20_DQ_OUT=0;// Write 0
delay_us(60);
DS18B20_DQ_OUT=1;
delay_us(2);
}
}
}
//开始温度转换
void DS18B20_Start(void)// ds1820 start convert
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);// skip rom
DS18B20_Write_Byte(0x44);// convert
}
//初始化DS18B20的IO口 DQ 同时检测DS的存在
//返回1:不存在
//返回0:存在
u8 DS18B20_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);//使能GPIOG时钟
//GPIOG9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//50MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOG, &GPIO_InitStructure);//初始化
DS18B20_Rst();
return DS18B20_Check();
}
//从ds18b20得到温度值
//精度:0.1C
//返回值:温度值 (-550~1250)
short DS18B20_Get_Temp(void)
{
u8 temp;
u8 TL,TH;
short tem;
DS18B20_Start (); // ds1820 start convert
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);// skip rom
DS18B20_Write_Byte(0xbe);// convert
TL=DS18B20_Read_Byte(); // LSB
TH=DS18B20_Read_Byte(); // MSB
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0;//温度为负
}else temp=1;//温度为正
tem=TH; //获得高八位
tem<<=8;
tem+=TL;//获得底八位
tem=(double)tem*0.625;//转换
if(temp)return tem; //返回温度值
else return -tem;
}


















 2331
2331

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











