







对于一般的机器人动力学方程:
M
(
q
)
q
¨
+
N
(
q
,
q
˙
)
q
¨
=
τ
+
τ
d
M (q) \ddot q +N (q,\dot q ) \ddot q = \tau+\tau_d
M(q)q¨+N(q,q˙)q¨=τ+τd
其中:
N
(
q
,
q
˙
)
q
¨
=
C
(
q
,
q
˙
)
q
˙
+
G
(
q
)
N (q,\dot q ) \ddot q= C(q,\dot q)\dot q+G(q)
N(q,q˙)q¨=C(q,q˙)q˙+G(q)
换一种形式,写为:
M
x
(
q
)
x
¨
+
N
x
(
q
,
q
˙
)
=
f
+
f
d
M_x (q) \ddot x +N_x (q,\dot q ) = f+f_d
Mx(q)x¨+Nx(q,q˙)=f+fd
其中:
M
s
(
q
)
=
J
J
∗
−
1
M
(
q
)
J
∗
−
1
J
T
M_s(q)=JJ^{-1}_*M(q)J^{-1}_*J^{T}
Ms(q)=JJ∗−1M(q)J∗−1JT
N
x
(
q
,
q
˙
)
=
J
J
∗
−
1
N
(
q
,
q
˙
)
−
M
x
(
q
)
J
˙
J
∗
−
1
J
T
x
˙
N_x(q,\dot q)=JJ^{-1}_*N(q,\dot q)-M_x(q)\dot JJ^{-1}_*J^{T}\dot x
Nx(q,q˙)=JJ∗−1N(q,q˙)−Mx(q)J˙J∗−1JTx˙
f
=
J
J
∗
−
1
τ
f=JJ^{-1}_*\tau
f=JJ∗−1τ
f
d
=
J
J
∗
−
1
τ
d
f_d=JJ^{-1}_*\tau_d
fd=JJ∗−1τd
主从机器人的控制方程可写为:
M
x
m
(
q
m
)
x
¨
m
+
N
x
m
(
q
m
,
q
˙
m
)
=
f
m
+
f
h
+
f
d
,
m
(1)
M_{xm} (q_m) \ddot x_m +N_{xm} (q_m,\dot q_m ) = f_m+f_h+f_{d,m} \tag1
Mxm(qm)x¨m+Nxm(qm,q˙m)=fm+fh+fd,m(1)
M
x
s
(
q
s
)
x
¨
s
+
N
x
s
(
q
s
,
q
˙
s
)
=
f
s
−
f
e
+
f
d
,
s
(2)
M_{xs} (q_s) \ddot x_s +N_{xs} (q_s,\dot q_s ) = f_s-f_e+f_{d,s} \tag2
Mxs(qs)x¨s+Nxs(qs,q˙s)=fs−fe+fd,s(2)
m,s分别代表机器人的主从,
f
d
,
m
,
f
d
,
s
f_{d,m},f_{d,s}
fd,m,fd,s 表示笛卡尔空间中施加到主末端执行器和从末端执行器的(等效)干扰力,
f
m
,
f
s
f_m, f_s
fm,fs是笛卡尔空间中应用于主末端执行器和从末端执行器的(等效)控制力,
f
h
,
f
e
f_h,f_e
fh,fe是由人类操作者和远程环境施加到主末端执行器和从末端执行器的力。
基于干扰观测器的四通道遥操作控制系统如下:
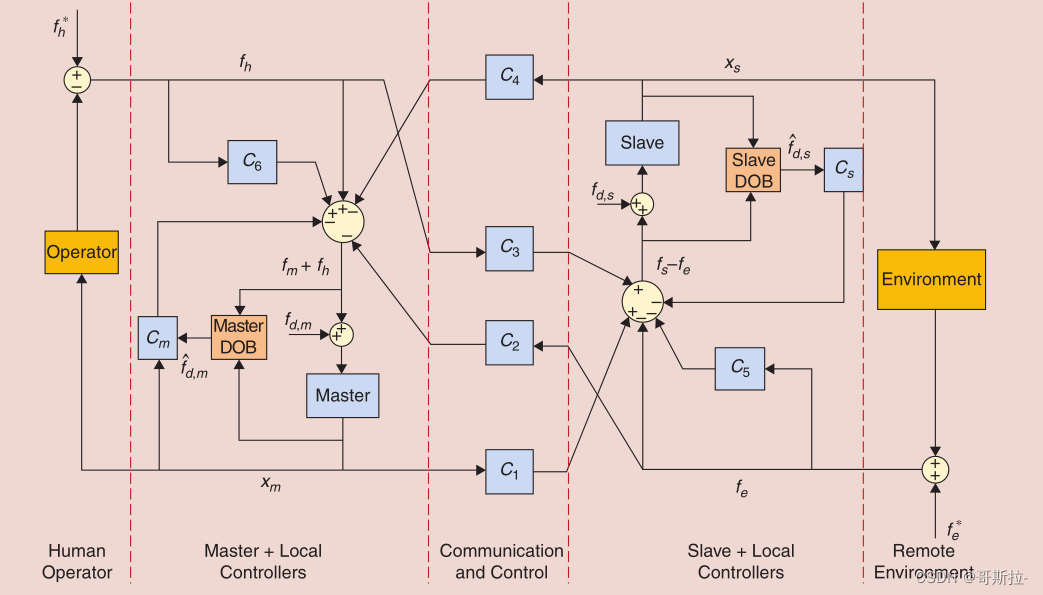
众所周知,想要在没有干扰和延迟的情况下,系统变得完全透明,控制器应该这么设计:
C
1
=
Z
s
+
C
s
C
2
=
I
+
C
6
C
3
=
I
+
C
5
C
4
=
−
Z
m
−
C
m
0
(3)
\begin{aligned} C_1 & = Z_s+C_s \\ C_2& = I+C_6 \\ C_3 & = I+C_5 \\ C_4 & =-Z_m-C_m \\0 \end{aligned} \tag3
C1C2C3C40=Zs+Cs=I+C6=I+C5=−Zm−Cm(3)
这里的设计和田老师书上基于加速度的四通道控制不同,基于加速度的控制律设计无法保证理想的透明性,但是更加简单直观,低频带内系统可以近似理想的透明度。2022/9/28 想了一下基于加速度控制原理是和设计力位混合控制器像,似乎不太能用于多自由度系统
f
^
d
,
m
\hat f_{d,m}
f^d,m和
f
^
d
,
s
\hat f_{d,s}
f^d,s是干扰的估计量,设计控制律:
f
m
=
M
x
m
(
q
m
)
[
−
C
m
x
m
−
C
2
f
e
−
C
4
x
s
+
C
6
f
h
+
f
h
]
+
N
x
m
(
q
m
,
q
˙
m
)
−
f
h
−
f
^
d
,
m
f_m=M_{xm} (q_m)[-C_mx_m-C_2f_e-C_4x_s+C_6f_h+f_h]+N_{xm} (q_m,\dot q_m ) -f_h-\hat f_{d,m}
fm=Mxm(qm)[−Cmxm−C2fe−C4xs+C6fh+fh]+Nxm(qm,q˙m)−fh−f^d,m
f
s
=
M
x
s
(
q
s
)
[
−
C
s
x
s
+
C
1
X
m
+
C
3
f
h
−
C
5
f
e
−
f
e
]
+
N
x
s
(
q
s
,
q
˙
s
)
+
f
e
−
f
^
d
,
s
f_s=M_{xs} (q_s)[-C_sx_s+C_1X_m+C_3f_h-C_5f_e-f_e]+N_{xs} (q_s,\dot q_s ) +f_e-\hat f_{d,s}
fs=Mxs(qs)[−Csxs+C1Xm+C3fh−C5fe−fe]+Nxs(qs,q˙s)+fe−f^d,s
带入(1)(2)得
x
¨
m
=
−
C
m
x
m
−
C
2
f
e
−
C
4
x
s
+
C
6
f
h
+
f
h
+
M
x
m
−
1
(
q
m
)
Δ
f
d
,
m
(4)
\ddot x_m=-C_mx_m-C_2f_e-C_4x_s+C_6f_h+f_h+M^{-1}_{xm}(q_m)\Delta f_{d,m} \tag4
x¨m=−Cmxm−C2fe−C4xs+C6fh+fh+Mxm−1(qm)Δfd,m(4)
x
¨
s
=
−
C
s
x
s
+
C
1
x
m
+
C
3
f
h
−
C
5
f
e
−
f
e
+
M
x
s
−
1
(
q
s
)
Δ
f
d
,
s
(5)
\ddot x_s=-C_sx_s+C_1x_m+C_3f_h-C_5f_e-f_e+M^{-1}_{xs}(q_s)\Delta f_{d,s} \tag5
x¨s=−Csxs+C1xm+C3fh−C5fe−fe+Mxs−1(qs)Δfd,s(5)
其中
Δ
f
d
,
m
=
f
d
,
m
−
f
^
d
,
m
\Delta f_{d,m}=f_{d,m}-\hat f_{d,m}
Δfd,m=fd,m−f^d,m和
Δ
f
d
,
s
=
f
d
,
s
−
f
^
d
,
s
\Delta f_{d,s}=f_{d,s}-\hat f_{d,s}
Δfd,s=fd,s−f^d,s其中(4)和(5)描述了一种N自由度常规无干扰四通道遥操作系统,其中主机器人和从机器人由单位惯性矩阵给出
Z
m
(
s
)
=
s
2
I
Z_m(s)=s^2I
Zm(s)=s2I,
Z
s
(
s
)
=
s
2
I
Z_s(s)=s^2I
Zs(s)=s2I(这里不理解,什么意思呢)
假如主从机器人的控制器是比例微分控制器:
C
m
=
K
m
v
s
+
K
m
p
C_m=K_{mv}s+K_{mp}
Cm=Kmvs+Kmp
C
s
=
K
s
v
s
+
K
s
p
C_s=K_{sv}s+K_{sp}
Cs=Ksvs+Ksp
将式3中的力反馈增益项(
C
2
,
C
3
C_2,C_3
C2,C3)设计为:
C
2
=
C
m
f
,
C
3
=
C
s
f
C_2=C_{mf},C_3=C_{sf}
C2=Cmf,C3=Csf
选择的其他控制器以满足(3)给出的完全透明条件:
C
1
=
s
2
I
+
K
s
v
s
+
K
s
p
C
2
=
−
(
s
2
I
+
K
m
v
s
+
K
m
p
)
C
3
=
C
s
f
−
I
C
4
=
C
m
f
−
I
(3)
\begin{aligned} C_1 & = s^2I+K_{sv}s+K_{sp} \\ C_2& =-(s^2I+K_{mv}s+K_{mp})\\ C_3 & = C_{sf}-I \\ C_4 & =C_{mf}-I \\ \end{aligned} \tag3
C1C2C3C4=s2I+Ksvs+Ksp=−(s2I+Kmvs+Kmp)=Csf−I=Cmf−I(3)
得出控制律:
f
m
=
M
x
m
(
q
m
)
[
x
¨
s
−
K
m
v
Δ
x
˙
m
−
K
m
p
Δ
x
m
+
C
m
f
Δ
f
]
+
N
x
m
(
q
m
,
q
˙
m
)
−
f
h
−
f
^
d
,
m
(6)
f_m=M_{xm} (q_m)[\ddot x_s-K_{mv}\Delta \dot x_m -K_{mp}\Delta x_m+C_{mf}\Delta f]+N_{xm} (q_m,\dot q_m ) -f_h-\hat f_{d,m} \tag6
fm=Mxm(qm)[x¨s−KmvΔx˙m−KmpΔxm+CmfΔf]+Nxm(qm,q˙m)−fh−f^d,m(6)
f
s
=
M
x
s
(
q
s
)
[
x
¨
m
−
K
s
v
Δ
x
˙
s
−
K
s
p
Δ
x
s
+
C
s
f
Δ
f
]
+
N
x
s
(
q
s
,
q
˙
s
)
+
f
e
−
f
^
d
,
s
(7)
f_s=M_{xs} (q_s)[\ddot x_m-K_{sv}\Delta \dot x_s -K_{sp}\Delta x_s+C_{sf}\Delta f]+N_{xs} (q_s,\dot q_s ) +f_e-\hat f_{d,s} \tag7
fs=Mxs(qs)[x¨m−KsvΔx˙s−KspΔxs+CsfΔf]+Nxs(qs,q˙s)+fe−f^d,s(7)
令
Δ
x
m
=
x
m
−
x
s
\Delta x_{m}=x_m-x_s
Δxm=xm−xs,
Δ
x
s
=
x
s
−
x
m
\Delta x_{s}=x_s-x_m
Δxs=xs−xm,
Δ
f
=
f
h
−
f
e
\Delta f=f_h-f_e
Δf=fh−fe带入(1),(2)得:
Δ
x
¨
m
=
−
K
m
v
Δ
x
˙
m
−
K
m
p
Δ
x
m
+
C
m
f
Δ
f
+
M
x
m
−
1
(
q
m
)
Δ
f
d
,
m
(8)
\Delta\ddot x_m=-K_{mv}\Delta \dot x_m -K_{mp}\Delta x_m+C_{mf}\Delta f+M^{-1}_{xm}(q_m)\Delta f_{d,m} \tag8
Δx¨m=−KmvΔx˙m−KmpΔxm+CmfΔf+Mxm−1(qm)Δfd,m(8)
Δ
x
¨
s
=
K
s
v
Δ
x
˙
s
+
K
s
p
Δ
x
s
−
C
s
f
Δ
f
−
M
x
s
−
1
(
q
s
)
Δ
f
d
,
s
(9)
\Delta\ddot x_s=K_{sv}\Delta \dot x_s +K_{sp}\Delta x_s-C_{sf}\Delta f-M^{-1}_{xs}(q_s)\Delta f_{d,s} \tag9
Δx¨s=KsvΔx˙s+KspΔxs−CsfΔf−Mxs−1(qs)Δfd,s(9)
由于
Δ
x
=
Δ
x
m
=
−
Δ
x
s
,
Δ
x
˙
=
Δ
x
˙
m
=
−
Δ
x
˙
s
,
Δ
x
¨
=
Δ
x
¨
m
=
−
Δ
x
¨
s
\Delta x=\Delta x_m=-\Delta x_s,\Delta \dot x=\Delta \dot x_m=-\Delta \dot x_s,\Delta \ddot x=\Delta \ddot x_m=-\Delta \ddot x_s
Δx=Δxm=−Δxs,Δx˙=Δx˙m=−Δx˙s,Δx¨=Δx¨m=−Δx¨s,假如
C
s
f
−
1
+
C
m
f
−
1
C^{-1}_{sf}+C^{-1}_{mf}
Csf−1+Cmf−1可逆,将式(8)(9)分别乘
C
s
f
−
1
,
C
m
f
−
1
C^{-1}_{sf},C^{-1}_{mf}
Csf−1,Cmf−1 再相加得:
Δ
x
¨
+
K
v
Δ
x
˙
+
K
p
Δ
x
=
Ψ
x
m
(
q
m
)
Δ
f
d
m
+
M
x
m
−
1
(
q
m
)
Δ
f
d
,
m
(8)
\Delta\ddot x+K_{v}\Delta \dot x +K_{p}\Delta x=\Psi_{xm}(q_m)\Delta f_{dm}+M^{-1}_{xm}(q_m)\Delta f_{d,m} \tag8
Δx¨+KvΔx˙+KpΔx=Ψxm(qm)Δfdm+Mxm−1(qm)Δfd,m(8)
其中:
K
v
=
(
C
s
f
−
1
+
C
m
f
−
1
)
−
1
(
C
s
f
−
1
K
s
v
−
C
m
f
−
1
K
m
v
)
K
p
=
(
C
s
f
−
1
+
C
m
f
−
1
)
−
1
(
C
s
f
−
1
K
s
p
−
C
m
f
−
1
K
m
p
)
Ψ
x
m
(
q
m
)
=
(
C
s
f
−
1
+
C
m
f
−
1
)
−
1
+
C
m
f
−
1
M
x
m
−
1
(
q
m
)
Ψ
x
s
(
q
s
)
=
(
C
m
f
−
1
+
C
s
f
−
1
)
−
1
+
C
s
f
−
1
M
x
s
−
1
(
q
s
)
(9)
\begin{aligned} K_v &=(C^{-1}_{sf}+C^{-1}_{mf})^{-1}(C^{-1}_{sf}K_{sv}-C^{-1}_{mf}K_{mv})\\ K_p &=(C^{-1}_{sf}+C^{-1}_{mf})^{-1}(C^{-1}_{sf}K_{sp}-C^{-1}_{mf}K_{mp})\\ \Psi_{xm}(q_m) & =(C^{-1}_{sf}+C^{-1}_{mf})^{-1}+C^{-1}_{mf}M^{-1}_{xm}(q_m) \\ \Psi_{xs}(q_s) & =(C^{-1}_{mf}+C^{-1}_{sf})^{-1}+C^{-1}_{sf}M^{-1}_{xs}(q_s) \\ \end{aligned} \tag9
KvKpΨxm(qm)Ψxs(qs)=(Csf−1+Cmf−1)−1(Csf−1Ksv−Cmf−1Kmv)=(Csf−1+Cmf−1)−1(Csf−1Ksp−Cmf−1Kmp)=(Csf−1+Cmf−1)−1+Cmf−1Mxm−1(qm)=(Cmf−1+Csf−1)−1+Csf−1Mxs−1(qs)(9)
根据(1)(2)动力学方程,设计非线性干扰观测器:
f
^
˙
d
,
m
=
−
L
m
f
^
d
,
m
+
L
m
[
M
x
m
(
q
m
)
x
¨
m
+
N
x
m
(
q
m
,
q
˙
m
)
−
f
m
−
f
h
]
+
Ψ
x
m
T
(
q
m
)
(
Δ
x
˙
+
γ
Δ
x
)
(
10
)
\dot {\hat f}_{d,m}=-L_m \hat f_{d,m}+L_m[M_{xm} (q_m) \ddot x_m +N_{xm} (q_m,\dot q_m ) - f_m-f_h ]+ \Psi^{T}_{xm}(q_m)(\Delta \dot x+\gamma \Delta x ) (10)
f^˙d,m=−Lmf^d,m+Lm[Mxm(qm)x¨m+Nxm(qm,q˙m)−fm−fh]+ΨxmT(qm)(Δx˙+γΔx)(10)
f
^
˙
d
,
s
=
−
L
s
f
^
d
,
s
+
L
s
[
M
x
s
(
q
s
)
x
¨
s
+
N
x
s
(
q
s
,
q
˙
s
)
+
f
s
−
f
h
]
+
Ψ
x
s
T
(
q
s
)
(
Δ
x
˙
+
γ
Δ
x
)
(
11
)
\dot {\hat f}_{d,s}=-L_s \hat f_{d,s}+L_s[M_{xs} (q_s) \ddot x_s +N_{xs} (q_s,\dot q_s ) + f_s-f_h ]+ \Psi^{T}_{xs}(q_s)(\Delta \dot x+\gamma \Delta x ) (11)
f^˙d,s=−Lsf^d,s+Ls[Mxs(qs)x¨s+Nxs(qs,q˙s)+fs−fh]+ΨxsT(qs)(Δx˙+γΔx)(11)
这里没有懂干扰观测器的后坠部分,是相对于传统干扰观测器对其作出的改进
将式(1)(2)带入(10)(11)得:
f
^
˙
d
,
m
=
L
m
Δ
f
d
,
m
+
Ψ
x
m
T
(
q
m
)
(
Δ
x
˙
+
γ
Δ
x
)
\dot {\hat f}_{d,m}=L_m \Delta f_{d,m}+ \Psi^{T}_{xm}(q_m)(\Delta \dot x+\gamma \Delta x )
f^˙d,m=LmΔfd,m+ΨxmT(qm)(Δx˙+γΔx)
f
^
˙
d
,
s
=
L
s
Δ
f
d
,
s
+
Ψ
x
s
T
(
q
s
)
(
−
Δ
x
˙
−
γ
Δ
x
)
\dot {\hat f}_{d,s}=L_s \Delta f_{d,s}+ \Psi^{T}_{xs}(q_s)(-\Delta \dot x-\gamma \Delta x )
f^˙d,s=LsΔfd,s+ΨxsT(qs)(−Δx˙−γΔx)
由
f
˙
d
,
m
=
f
^
˙
d
,
m
+
Δ
f
˙
d
,
m
\dot f_{d,m}=\dot {\hat f}_{d,m}+\Delta \dot f_{d,m}
f˙d,m=f^˙d,m+Δf˙d,m得:
Δ
f
˙
d
,
m
=
f
˙
d
,
m
−
L
m
Δ
f
d
,
m
−
Ψ
x
m
T
(
q
m
)
(
Δ
x
˙
+
γ
Δ
x
)
\Delta\dot { f}_{d,m}=\dot f_{d,m}-L_m \Delta f_{d,m}- \Psi^{T}_{xm}(q_m)(\Delta \dot x+\gamma \Delta x )
Δf˙d,m=f˙d,m−LmΔfd,m−ΨxmT(qm)(Δx˙+γΔx)
Δ
f
˙
d
,
s
=
f
˙
d
,
s
−
L
s
Δ
f
d
,
s
−
Ψ
x
s
T
(
q
s
)
(
−
Δ
x
˙
−
γ
Δ
x
)
\Delta\dot {f}_{d,s}=\dot f_{d,s}-L_s \Delta f_{d,s}-\Psi^{T}_{xs}(q_s)(-\Delta \dot x-\gamma \Delta x )
Δf˙d,s=f˙d,s−LsΔfd,s−ΨxsT(qs)(−Δx˙−γΔx)















 5441
5441











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









