







 本文介绍了OpenGL中相机的表示方法,包括相机的位置、正、右、上三个方向向量。详细讨论了欧拉角的概念,特别是俯仰角(Pitch)、偏航角(Yaw)和滚转角(Roll),并指出在相机旋转到±90°时,相机的向量方向会发生反转。内容涉及到角度与坐标轴的关系,以及在实际应用中相机在三维空间中的旋转效果。
本文介绍了OpenGL中相机的表示方法,包括相机的位置、正、右、上三个方向向量。详细讨论了欧拉角的概念,特别是俯仰角(Pitch)、偏航角(Yaw)和滚转角(Roll),并指出在相机旋转到±90°时,相机的向量方向会发生反转。内容涉及到角度与坐标轴的关系,以及在实际应用中相机在三维空间中的旋转效果。
基础概念
相机在opengl中的表示
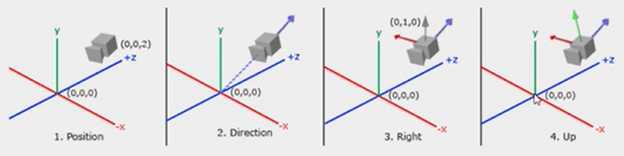
1相机位置
234相机的正、右、上(相机坐标在世界坐标系中向量表示)
相机坐标系上方up与世界坐标系上方向量重合
相机R为相机F正向量叉乘世界up
相机up为相机F叉乘相机R


欧拉角

Pitch 俯仰角;Yaw偏航角;Roll滚转角(相机不考虑)
角度对应xyz转换关系:

Camera::Camera(vec3 position, vec3 target, vec3 worldup)
{
Position = position;
WorldUp = worldup;
Forward = normalize(target - position);
Right = normalize(cross(Forward, WorldUp));
Up = normalize(cross(Forward, Right));
R = pow 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8866
8866











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









