







均匀线阵
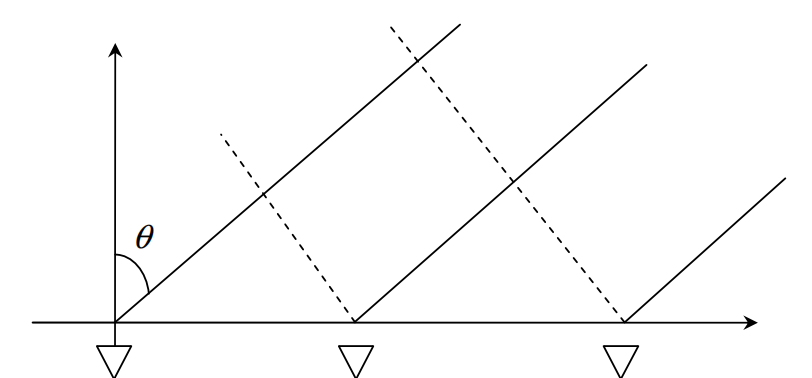
对于一个均匀线阵,假设每个阵元都是理想全向点源,布局如上图所示, 第 1 个阵元位于坐标原点,如果阵元间距为d ,空间窄带远场平面波到达原点的信号可以表示为
s
1
(
t
)
=
s
(
t
)
=
a
(
t
)
c
o
s
w
t
−
b
(
t
)
s
i
n
w
t
s_1(t)=s(t)=a(t)coswt-b(t)sinwt
s1(t)=s(t)=a(t)coswt−b(t)sinwt
第
l
l
l个阵元接收信号表示为
s
l
(
t
)
=
s
(
t
−
τ
l
)
s_l(t)=s(t-\tau _l)
sl(t)=s(t−τl)
由于信号是窄带信号,相对于载波相位变化,基带信号相位变化可以忽略不计,则
s
l
(
t
)
=
a
(
t
)
c
o
s
w
(
t
−
τ
l
)
−
b
(
t
)
s
i
n
w
(
t
−
τ
l
)
s_l(t)=a(t)cosw(t-\tau_l)-b(t)sinw(t-\tau_l)
sl(t)=a(t)cosw(t−τl)−b(t)sinw(t−τl)
第
l
l
l个阵元接收信号相对于第1个阵元接收信号的延时
τ
l
=
−
(
l
−
1
)
d
s
i
n
θ
c
\tau_l=-(l-1)\frac{dsin\theta}{c}
τl=−(l−1)cdsinθ
注意
τ
l
\tau_l
τl符号为负,因为第
l
l
l个阵元接收信号的等相位面落后于第1个阵元接收信号,故需要加上正的延时。
其中
θ
\theta
θ为信号入射角度,范围为
[
−
π
2
,
π
2
]
[-\frac{\pi}{2},\frac{\pi}{2}]
[−2π,2π]。
不同的阵元接收信号,延时不同,信号间存在由延时引起的相位差,该相位差的大小等于
w
τ
l
=
w
(
l
−
1
)
d
s
i
n
θ
c
=
2
π
(
l
−
1
)
d
s
i
n
θ
λ
w\tau_l=w(l-1)\frac{dsin\theta}{c}=\frac{2\pi(l-1)dsin\theta}{\lambda}
wτl=w(l−1)cdsinθ=λ2π(l−1)dsinθ
常取阵元间距
d
=
λ
2
d=\frac{\lambda}{2}
d=2λ,则
w
τ
l
=
π
(
l
−
1
)
s
i
n
θ
w\tau_l=\pi{(l-1)sin\theta}
wτl=π(l−1)sinθ
相控阵基本结构图
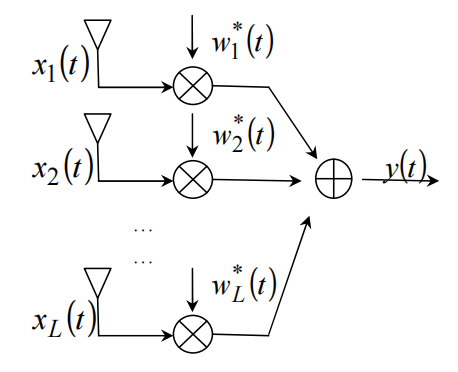
相控阵天线的基本原理,是通过对每个阵元接收信号进行加权处理,校正信号由于波程差所导致的相位差,该过程如上图所示 。
如果相控阵采用模拟方式实现,则加权移相是一个移相器。当相控阵采用数字化方式实现时,移相功能则通过一个复数乘法器实现。由于一个实数乘法器无法完成移相功能,所以,在数字相控阵当中,需要首先将阵元接收的实信号,
通过一定的正交变换,转换为复信号,也就是该实信号的解析信号。完成正交化后的复信号,通过复数加权,就可以实现移相功能。
常用的相控阵信号表示方式是采用复数矢量的方式,此时的阵列接收信号为一个列矢量,每个元素对应一个阵元接收信号,并且信号也是解析表示。此时第l 个阵元接收解析信号可以表示为
x
l
(
t
)
=
s
(
t
)
e
−
j
w
τ
l
x_l(t)=s(t)e^{-jw\tau_l}
xl(t)=s(t)e−jwτl
则,阵列接收信号矢量表示为
x
(
t
)
=
[
x
1
(
t
)
.
.
.
x
L
(
t
)
]
=
s
(
t
)
[
e
−
j
w
τ
1
.
.
.
e
−
j
w
τ
L
]
+
n
(
t
)
=
s
(
t
)
v
(
θ
)
+
n
(
t
)
\boldsymbol x(t)=\begin{bmatrix} x_1(t)\\ ...\\ x_L(t) \end{bmatrix}=s(t)\begin{bmatrix} e^{-jw\tau_1}\\ ...\\ e^{-jw\tau_L} \end{bmatrix}+ \boldsymbol n(t)=s(t)\boldsymbol v(\theta)+\boldsymbol n(t)
x(t)=
x1(t)...xL(t)
=s(t)
e−jwτ1...e−jwτL
+n(t)=s(t)v(θ)+n(t)
其中
s
(
t
)
=
[
a
(
t
)
+
j
b
(
t
)
]
e
j
w
t
=
m
(
t
)
e
j
w
t
s(t)=[a(t)+jb(t)]e^{jwt}=m(t)e^{jwt}
s(t)=[a(t)+jb(t)]ejwt=m(t)ejwt,
m
(
t
)
m(t)
m(t)称为信号复包络或复基带,信号为窄带信号时,
m
(
t
−
τ
)
≈
m
(
t
)
m(t-\tau) \approx m(t)
m(t−τ)≈m(t)。
噪声列矢量为
n
(
t
)
\boldsymbol n(t)
n(t)为
n
(
t
)
=
[
n
1
(
t
)
.
.
.
n
L
(
t
)
]
\boldsymbol n(t) = \begin{bmatrix} n_1(t)\\ ...\\ n_L(t) \end{bmatrix}
n(t)=
n1(t)...nL(t)
而矢量
v
(
θ
)
\boldsymbol v(\theta)
v(θ)称为信号的方向矢量,或导引矢量,它是由信号到达方向决定的列矢量,即信号入射角度
θ
\theta
θ。
v
(
θ
)
=
[
e
−
j
w
τ
1
.
.
.
e
−
j
w
τ
L
]
\boldsymbol v(\theta) = \begin{bmatrix} e^{-jw\tau_1}\\ ...\\ e^{-jw\tau_L} \end{bmatrix}
v(θ)=
e−jwτ1...e−jwτL
定义相控阵的权矢量为
w
=
v
(
θ
0
)
\boldsymbol w = \boldsymbol v(\theta_0)
w=v(θ0)
其中
θ
0
\theta_0
θ0为期望信号入射角度。
所以,窄带相控阵的权矢量就是信号的方向矢量。相控阵天线加权后的输出信号为
y
(
t
)
=
w
H
x
(
t
)
=
v
(
θ
0
)
H
s
(
t
)
v
(
θ
)
+
v
(
θ
0
)
H
n
(
t
)
=
L
s
(
t
)
+
w
H
n
(
t
)
y(t)=\boldsymbol w^H \boldsymbol x(t)=\boldsymbol v(\theta_0)^Hs(t)\boldsymbol v(\theta)+\boldsymbol v(\theta_0)^H \boldsymbol n(t)=Ls(t)+\boldsymbol w^H \boldsymbol n(t)
y(t)=wHx(t)=v(θ0)Hs(t)v(θ)+v(θ0)Hn(t)=Ls(t)+wHn(t)
上述加权求和的操作,在相控阵中通常称为波束合成。符号“
H
H
H”为共轭转置操作。故
w
H
v
(
θ
)
=
[
e
−
j
w
τ
1
.
.
.
e
−
j
w
τ
L
]
H
[
e
−
j
w
τ
1
.
.
.
e
−
j
w
τ
L
]
=
1
+
.
.
.
+
1
=
L
\boldsymbol w^H \boldsymbol v(\theta)= \begin{bmatrix} e^{-jw\tau_1}\\ ...\\ e^{-jw\tau_L} \end{bmatrix}^H \begin{bmatrix} e^{-jw\tau_1}\\ ...\\ e^{-jw\tau_L} \end{bmatrix}=1+...+1=L
wHv(θ)=
e−jwτ1...e−jwτL
H
e−jwτ1...e−jwτL
=1+...+1=L
确定信号功率和随机信号功率
对于确知信号
s
(
t
)
s(t)
s(t)
P
=
lim
T
→
∞
1
T
∫
−
T
2
T
2
s
2
(
t
)
d
t
P=\lim_{T \rightarrow \infty }\frac{1}{T}\int_{-\frac{T}{2}}^{\frac{T}{2}} s^2(t)dt
P=T→∞limT1∫−2T2Ts2(t)dt
若
s
(
t
)
s(t)
s(t)为复信号,则
P
=
lim
T
→
∞
1
T
∫
−
T
2
T
2
s
(
t
)
s
∗
(
t
)
d
t
P=\lim_{T \rightarrow \infty }\frac{1}{T}\int_{-\frac{T}{2}}^{\frac{T}{2}} s(t)s^*(t)dt
P=T→∞limT1∫−2T2Ts(t)s∗(t)dt
对于一个随机过程
ξ
(
t
)
\xi (t)
ξ(t),其均值或数学期望定义
E
[
ξ
(
t
)
]
=
∫
−
∞
∞
x
f
1
(
x
,
t
)
d
x
E\left [ \xi (t) \right ]=\int_{-\infty }^{\infty}xf_1(x,t)dx
E[ξ(t)]=∫−∞∞xf1(x,t)dx
常记为
a
(
t
)
a(t)
a(t),其中
f
1
(
x
,
t
)
f_1(x,t)
f1(x,t)为
ξ
(
t
)
\xi(t)
ξ(t)的一维概率密度函数。
随机过程的方差定义为
D
[
ξ
(
t
)
]
=
E
{
[
ξ
(
t
)
−
a
(
t
)
]
2
}
=
E
[
ξ
2
(
t
)
]
−
a
2
(
t
)
D\left [ \xi (t) \right ]=E\left \{ \left [ \xi (t)- a(t)\right ] ^2\right \}=E\left [ \xi^2(t) \right ]-a^2(t)
D[ξ(t)]=E{[ξ(t)−a(t)]2}=E[ξ2(t)]−a2(t)
其常记为
σ
2
(
t
)
\sigma ^2 (t)
σ2(t)
D
[
ξ
(
t
)
]
=
∫
−
∞
∞
x
2
(
t
)
f
1
(
x
,
t
)
d
x
−
[
a
(
t
)
]
2
D\left [ \xi (t) \right ]=\int_{-\infty}^{\infty} x^2(t)f_1(x,t)dx-[a(t)]^2
D[ξ(t)]=∫−∞∞x2(t)f1(x,t)dx−[a(t)]2
故方差等于均方值与均值平方之差。前者为交流功率,后者为直流功率。通常
x
(
t
)
x(t)
x(t)为交流信号,故其信号功率就是方差。
另外有
P
=
∫
−
∞
∞
P
(
f
)
d
f
,
P
(
f
)
为功率谱密度
P=\int_{-\infty}^{\infty}P(f)df,P(f)为功率谱密度
P=∫−∞∞P(f)df,P(f)为功率谱密度
数字波束合成 (Digital Beam Forming,DBF)
相控阵方向图
根据阵列天线方向图乘积定理,方向图等于阵元因子与阵因子的乘积。
P
(
θ
,
ϕ
)
=
P
E
(
θ
,
ϕ
)
P
A
(
θ
,
ϕ
)
P(\theta,\phi)=P_E(\theta,\phi)P_A(\theta,\phi)
P(θ,ϕ)=PE(θ,ϕ)PA(θ,ϕ)
通常假设阵元都是相同的全向天线,故
P
E
(
θ
,
ϕ
)
=
1
P_E(\theta,\phi)=1
PE(θ,ϕ)=1
由输出信号与接收信号的关系为
y
(
t
)
=
w
H
x
(
t
)
y(t)=\boldsymbol w^H\boldsymbol x(t)
y(t)=wHx(t)
y
(
t
)
y
∗
(
t
)
d
t
=
w
H
s
(
t
)
v
(
θ
)
s
∗
(
t
)
[
w
H
v
(
θ
)
]
∗
=
∣
s
(
t
)
∣
2
⋅
∣
w
H
s
(
t
)
v
(
θ
)
∣
2
y(t)y^*(t)dt=\boldsymbol w^H s(t) \boldsymbol v(\theta) s^*(t) [\boldsymbol w^H\boldsymbol v(\theta)]^* = |s(t)|^2 \cdot |\boldsymbol w^H s(t) \boldsymbol v(\theta) |^2
y(t)y∗(t)dt=wHs(t)v(θ)s∗(t)[wHv(θ)]∗=∣s(t)∣2⋅∣wHs(t)v(θ)∣2
其中
∗
*
∗对于矩阵或矢量而言即为
H
H
H,反之
H
H
H对于复数而言即是
∗
*
∗。
若
P
i
=
1
P_i=1
Pi=1,则输出信号功率表示为
P
(
θ
)
=
∥
w
H
v
(
θ
)
∥
2
P(\theta)=\begin{Vmatrix} \boldsymbol w^H\boldsymbol v(\theta) \end{Vmatrix}^2
P(θ)=
wHv(θ)
2
则场强方向图表示为
B
(
θ
)
=
∥
w
H
v
(
θ
)
∥
B(\theta)=\begin{Vmatrix} \boldsymbol w^H\boldsymbol v(\theta) \end{Vmatrix}
B(θ)=
wHv(θ)
式中,符号
∥
∥
\begin{Vmatrix} \end{Vmatrix}
∥∥为2-范数。
相控阵的信噪比
输出信号
y
(
t
)
=
L
s
(
t
)
y(t)=Ls(t)
y(t)=Ls(t)的功率
P
s
o
=
1
T
∫
y
(
t
)
y
∗
(
t
)
d
t
=
1
T
∫
L
s
(
t
)
L
s
∗
(
t
)
d
t
=
L
2
1
T
∫
s
(
t
)
s
∗
(
t
)
d
t
=
L
2
P
s
i
P_{so}=\frac{1}{T}\int y(t)y^*(t)dt=\frac{1}{T}\int Ls(t)Ls^*(t)dt=L^2\frac{1}{T}\int s(t)s^*(t)dt=L^2 P_{si}
Pso=T1∫y(t)y∗(t)dt=T1∫Ls(t)Ls∗(t)dt=L2T1∫s(t)s∗(t)dt=L2Psi
噪声功率
由
y
(
t
)
=
)
=
L
s
(
t
)
+
w
H
n
(
t
)
y(t)=)=Ls(t)+\boldsymbol w^H \boldsymbol n(t)
y(t)=)=Ls(t)+wHn(t),移相不改变噪声功率。
P
n
o
=
L
P
n
i
P_{no}=L P_{ni}
Pno=LPni
其可用等效噪声温度描述。
故
S
N
R
o
=
P
s
o
P
n
o
=
L
P
s
i
P
n
i
SNR_o = \frac{P_{so}}{P_{no}}=L\frac{P_{si}}{P_{ni}}
SNRo=PnoPso=LPniPsi
相控阵的优点
抗干扰、多波束、宽带。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









