









 ComplexYOLO是一种3D目标检测方法,利用点云数据生成鸟瞰图,并通过YOLOv2网络实现多类别的实时检测。该方法引入了E-RPN来计算3D框的朝向,同时为了简化计算,各类别目标的高度被预设为固定值。
ComplexYOLO是一种3D目标检测方法,利用点云数据生成鸟瞰图,并通过YOLOv2网络实现多类别的实时检测。该方法引入了E-RPN来计算3D框的朝向,同时为了简化计算,各类别目标的高度被预设为固定值。
Complex YOLO
CVPR 2018的一篇文章
因为对YOLO相对熟悉一些,因此以Complex YOLO 做为第一个学习的3D目标检测模型
主要贡献
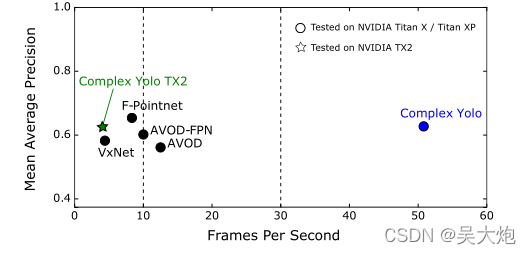
1、检测速度快的3D检测网络
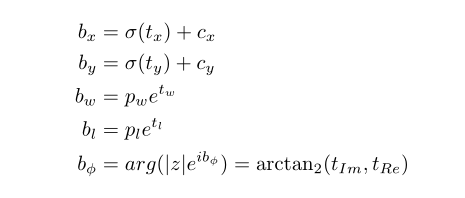
2、使用E-RPN计算3D框的朝向
3、能够一次预测多个类
点云的数据处理
将点云数据转为鸟瞰图,选择左右80m,前方40m作为检测区域,8cm划分栅格
然后提取强度密度高度特征组成RGB图,这里的RGB图只是仿照图像的,组成三个通道
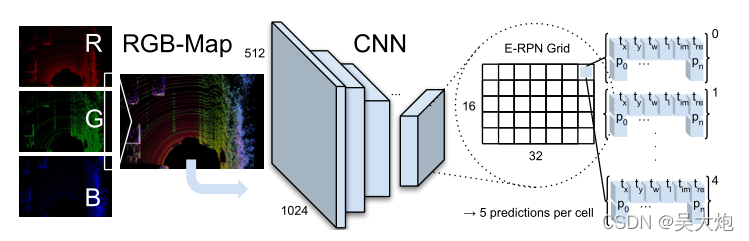
网络结构
这里的网络的结构主要使用的YOLOv2,因为后续的YOLO网络还没提出来
关于YOLOv2网络不再赘续了,可以参考其他博客
这里说一下针对3D目标检测不一样的地方
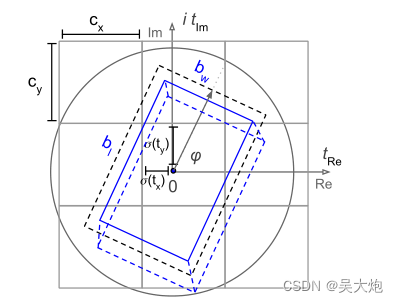
因为是3D目标检测,因此最后回归出来的结构不一样,增加了两个,分别是中线点坐标,目标框的长宽,置信度以及增加的用于计算目标角度(yaw角)的实部和虚部,cartan进行计算
要想计算出3D框,还缺少一维参数,论文中将高度进行预先定义,每一个类别固定一个高度。
损失函数
损失函数除了原来YOLO的,还增加了欧拉回归部分损失,也就是计算yaw角的损失,看下面的损失函数,很容易看明白

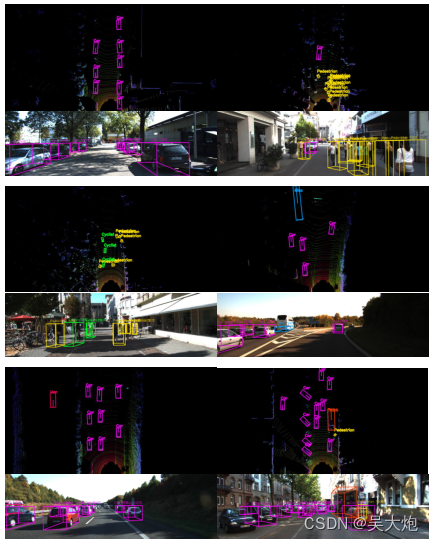
检测结果图

















 1781
1781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









