






读懂mobilenetv2首先要了解的概念:深度可分离卷积Depthwise Separable Convolutions(DSC),残差块(residual block)等
论文地址:[1801.04381] MobileNetV2: Inverted Residuals and Linear Bottlenecks (arxiv.org)
项目地址:pytorch框架
Randl/MobileNetV2-pytorch: Impementation of MobileNetV2 in pytorch (github.com)
1.MobileNetV2的主要思想
提出purpose:
提高移动模型的效率Improves the performance of mobile models
提出反残差块proposed model:Inverted Residual Block
2. 论文中的网络结构
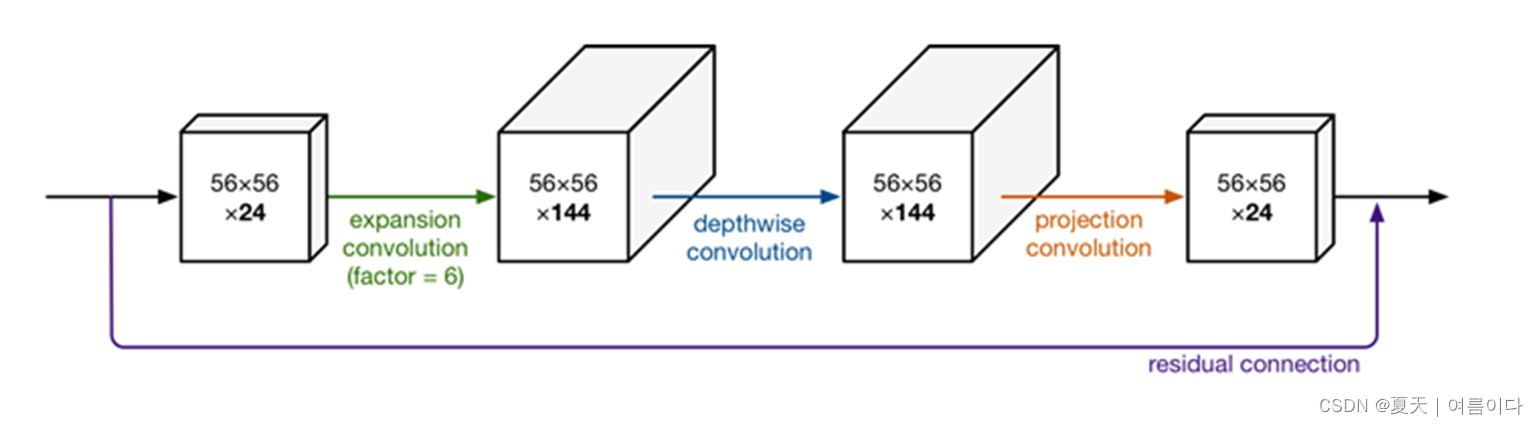
2.1反残差结构Inverted Residual Block
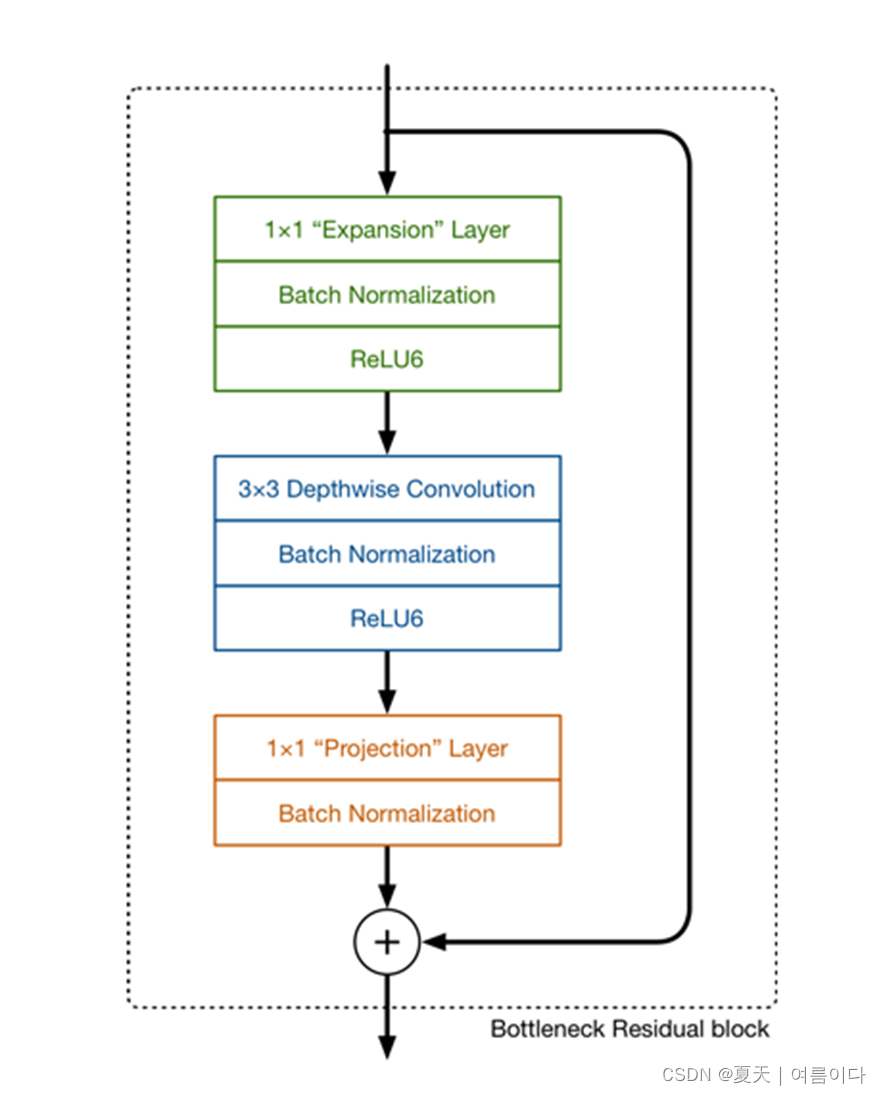
This module takes as an input a low dim compressed representation which is first expanded to high dim and filtered with a light depthwise convolution.
该模块将低维度的压缩表示作为输入,首先将其扩展为高维度,并通过深度卷积进行过滤。
(在代码中是基本层+BN+ReLU6)
expansion factor指扩展因子(膨胀系数)
先増维,后降维的情况和resnet block 先降维后増维的情况相反,所以叫inverted residual block,
2.2MobileNetV2网络框架
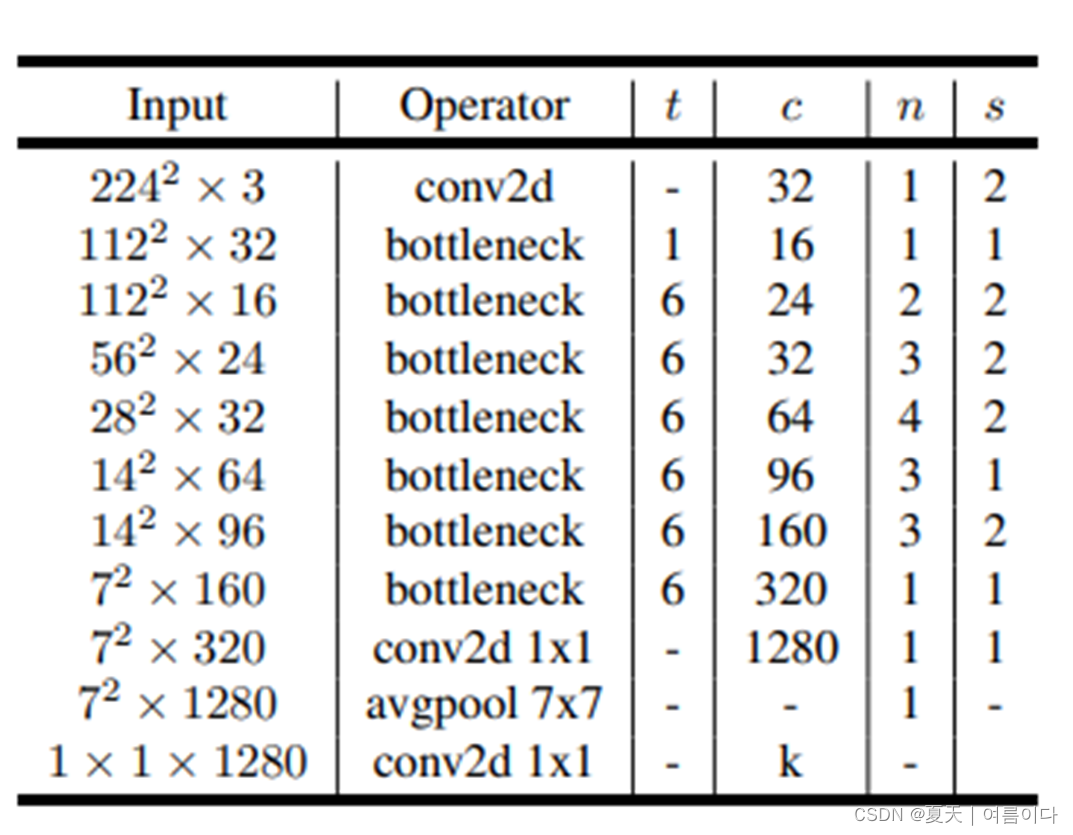
以反残差块为基础,构建MobileNetV2.
-
t : 扩展因子(膨胀系数)expansion factor
-
c : 输出通道数 number c of output channels
-
n
: 重复次数 number of repetitions
-
s
: 步长
stride
每个人的理解方式不同,按照我可以理解的方式搭建网络(个人觉得此代码更有助于理解论文):
#step1 导入所需要的包
import torch
import torch.nn as nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import torch.optim as optim
from torch.utils.data import DataLoader
#step2 定义device
device="cuda" if torch.cuda.is_available() else "cpu"
#step3 参数设置(学习率,训练轮数,批大小)
learning_rate=0.1
training_epochs=10
batch_size=16
#step4 Dataset & DataLoader设置数据集和数据加载器
trans=transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor()
])
#DataSet设置数据集
cifar10_train=dsets.CIFAR10(root="cifar10_data",train=True,transform=trans,download=True)
cifar10_test=dsets.CIFAR10(root="cifar10_data",train=False,transform=trans,download=True)
#dataloader设置数据加载器
train_loader=DataLoader(dataset=cifar10_train,batch_size=batch_size,shuffle=True,drop_last=True)
test_loader=DataLoader(dataset=cifar10_test,batch_size=batch_size,shuffle=False,drop_last=False)
#step5 model定义层
def make_layers(cfg):
in_channel=32
layers=[]
for v in cfg:
t,out_channel,n,stride=v
#编写深度可分离卷积DSC layer
for i in range(n):
if i !=0:
stride=1
conv_pointwise1=nn.Conv2d(in_channel,
in_channel*t,
kernel_size=1,
stride=1,
padding=0)
conv_depthwise = nn.Conv2d(in_channel * t,
in_channel * t,
kernel_size=3,
groups=in_channel*t,
stride=stride,
padding=1)
conv_pointwise2 = nn.Conv2d(in_channel*t,
out_channel ,
kernel_size=1,
stride=1,
padding=0)
#增加层之后的批量标准化和激活
layers.append([conv_pointwise1,nn.BatchNorm2d(in_channel * t),nn.ReLU6(),
conv_depthwise, nn.BatchNorm2d(in_channel * t), nn.ReLU6(),
conv_pointwise2,nn.BatchNorm2d(out_channel)])
in_channel=out_channel
return layers
#定义网络
class Mobilenet(nn.Module):
def __init__(self,features,stride_list,num_classes=10):
super(Mobilenet, self).__init__()
#conv2d
self.layer1=nn.Sequential(
nn.Conv2d(3,32,kernel_size=3,stride=2,padding=1),
nn.BatchNorm2d(32),
)
#第一层卷积输入通道为3,输出通道为32,卷积核为3,步长为2,填充为1
#bottleneck
self.bottle_necks=[]
for layer in features:
self.bottle_necks.append(nn.Sequential(*layer).cuda())
#论文中共17个bottleneck
#last conv2d
self.layer2=nn.Sequential(
nn.Conv2d(320,1280,kernel_size=1,stride=1,padding=0),
nn.BatchNorm2d(1280),
nn.AvgPool2d(7,7),
)
#论文中的最后一个卷积和一个平均池化
#classfier
self.fc=nn.Linear(1280,num_classes)
def forward(self,x):
#layer1
out=self.layer1(x)
#bottlr_neck
for i in range(len(self.bottle_necks)):
new=self.bottle_necks[i](out)
if stride_list[i]==1:#skip connection
if out.shape[1]!=new.shape[1]:
out=Downsample(out.shape[1],new.shape[1]).cuda()(out)
new+=out
out=new
# layer2
#print("size",out.size())
out = self.layer2(out)
#fc
out=out.view(out.size(0),-1)
out=self.fc(out)
return out
#当stride=2时,执行下采样
class Downsample(nn.Module):
def __init__(self,in_channel,out_channel):
super(Downsample, self).__init__()
self.layer=nn.Sequential(
nn.Conv2d(in_channel,out_channel,kernel_size=1),
nn.BatchNorm2d(out_channel),
)
def forward(self,x):
out=self.layer(x)
return out
# expansion factor扩展因子t,输出通道数c,重复次数n,步长s
cfg={'mobilenetv2':[(1,16,1,1),
(6,24,2,2),
(6,32,3,2),
(6,64,4,2),
(6,96,3,1),
(6,160,3,2),
(6,320,1,1)]}
bottleneck=make_layers(cfg["mobilenetv2"])
stride_list=[1,
2,1,
2,1,1,
2,1,1,1,
1,1,1,
2,1,1,
1]
model=Mobilenet(bottleneck,stride_list,num_classes=10).to(device)
model.cuda()
target=torch.Tensor(2,3,224,224).to(device)
#不能删掉batch_size
after_target=model(target)
print(after_target.shape)
print(after_target)
#step6 optim&loss优化器和函数
criterion=nn.CrossEntropyLoss().to(device)
optimizer=optim.Adam(model.parameters(),lr=learning_rate)
#step7 train训练
model.train()
iteration=len(train_loader)
for epoch in range(training_epochs):
loss=0.0
acc_correct=0.0
for idx,sample in enumerate(train_loader):
optimizer.zero_grad()
X,Y=sample
X=X.to(device)
Y=Y.to(device)
#foeward,backward,optim
hypothesis=model(X)
cost=criterion(hypothesis,Y)
cost.backward()
optimizer.step()
#calculate
loss+=cost.item()
correct=(torch.argmax(hypothesis,dim=1)==Y).float()
acc_correct+=correct.sum()
acc_correct/=(batch_size*iteration)
loss/=iteration
print("[Epoch:{:04d}],loss:{:.2f},acc:{:.2f}%".format(epoch,loss,acc_correct*100))
#step8 test测试
with torch.no_grad():
model.eval()
accuracy=0
loss=0
for idx,sample in enumerate(test_loader):
X,Y=sample
X=X.to(device)
Y=Y.to(device)
hypothesis=model(X)
cost=criterion(hypothesis,Y)
#calculate
loss+=cost.item()
accuracy=(torch.argmax(hypothesis,dim=1)==Y).sum().float()
acc_correct/=len(test_loader)
accuracy/=(batch_size*len(test_loader))
print("[test]loss:{:.4f},acc:{:.4f}%".format(loss/1000,acc_correct*1000))
















 5089
5089











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











