






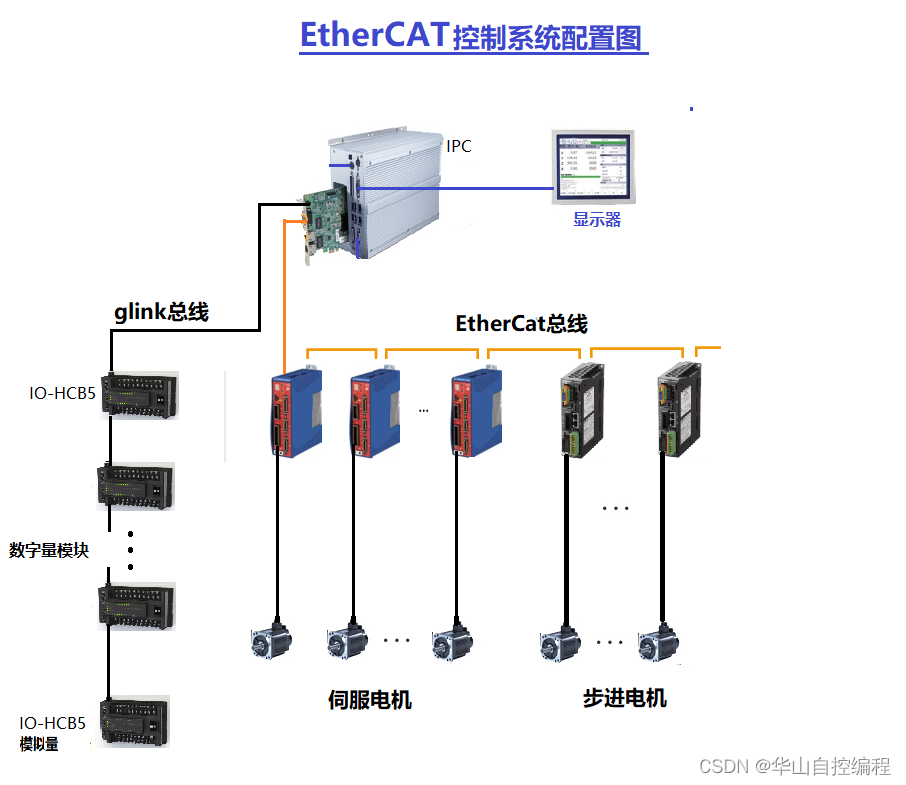
EtherCAT(以太网控制自动化技术)凭借其高实时性、低延迟和灵活拓扑,已成为工业自动化领域的核心通信协议。而**COE(CANopen over EtherCAT)**作为其关键应用层协议,通过融合CANopen标准的优势,为设备间的数据交互提供了高效、可靠的解决方案。以下从核心机制、功能优势及实际应用三个维度,深度剖析COE如何成为工业智能化的“神经中枢”。
---
一、COE的核心机制:兼容性与高效性的双重突破
COE协议将CANopen协议无缝嵌入EtherCAT帧结构中,既保留了CANopen在设备配置和对象字典管理上的成熟性,又借助EtherCAT的高速硬件处理能力,实现了数据通信效率的飞跃。其核心机制包括:
1. 双通道通信模式
PDO(过程数据对象):负责周期性数据传输,如实时控制信号,通过硬件直接处理,实现微秒级同步,保障机器人关节运动、传感器反馈等场景的精准性。
SDO(服务数据对象):用于非周期性配置,如参数读写、固件升级。通过邮箱通信(SM通道),主站可动态调整从站设备的运行参数,无需中断实时控制流程。
2. 智能邮箱通信机制
SDO采用全双工邮箱通信,主站通过“写命令-响应”机制与从站交互。例如,配置PDO映射时,主站通过SDO将对象字典条目(如0x6040、0x607A)写入从站的0x1700对象,实现灵活的数据映射。对于大数据传输,COE支持分段下载,通过多次迭代完成复杂配置,显著降低单次通信负载。
---
二、COE的技术优势:重构工业控制逻辑
1. 兼容性与开放性
COE继承了CANopen的标准化对象字典(Object Dictionary),支持跨厂商设备互联,无需定制协议,大幅降低系统集成成本。例如,模块化从站(如MDP Device Model)通过耦合器统一管理多个子模块,仅需配置一次即可实现多设备协同。
2. 动态路由与资源优化
通过逻辑寻址(FMMU映射),COE将物理地址转换为4GB虚拟空间,主站可直接操作逻辑地址,减少CPU负载。实验显示,EtherCAT的CPU负载比传统总线低25%-30%,为复杂控制任务释放算力。
3. 高可靠性与容错能力
SDO支持紧急事件(Emergency)机制,从站可主动上报错误码(如0xFF00超温报警),主站实时响应并终止异常传输,确保系统稳定性。
---
三、COE的工业应用:从机械臂到人形机器人的智能化跃迁
1. 工业机器人场景
在六轴机械臂中,COE通过PDO实现关节位置、速度的毫秒级同步,同时利用SDO动态调整力矩参数,适应不同负载需求。例如,某协作机器人采用28-30个EtherCAT从站芯片,通过COE协议实现手指关节的精细化控制。
2. 模块化产线部署
汽车制造产线中,COE支持即插即用(Hot-Swap)功能,新增传感器或驱动器可自动接入系统,主站通过SDO快速配置其参数,减少停机时间。某案例显示,采用COE的产线调试效率提升40%。
3. 人形机器人创新
在人形机器人领域,COE的高扩展性支持多传感器复用。例如,手部关节的力觉、视觉数据可通过同一EtherCAT芯片整合,减少布线复杂度,同时通过SDO实现AI算法的动态参数注入,推动“感知-决策-执行”闭环优化。
---
四、未来展望:COE与智能制造的深度融合
随着工业4.0的推进,COE将进一步与AI、边缘计算结合。例如,通过实时数据采集(PDO)训练数字孪生模型,再以SDO动态下发优化参数,实现自适应控制。此外,开源生态(如IgH主站)的成熟,将加速COE在中小企业的普及,推动智能制造普惠化。
结语
COE不仅是EtherCAT协议的功能延伸,更是工业控制从“机械化”向“智能化”演进的关键枢纽。其兼容性、高效性与灵活性,正重构全球工业自动化版图,为未来工厂注入“智慧血液”。

















 1474
1474

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









