






完整源码链接在最后~
示例数据是MPU9250的九轴数据,包括加速度计,陀螺仪,磁力计,数据最后一行是时间。
首先是单位转换值和各类初值设定,并对数据进行了处理:
1.单位的转换,把acc,gyro和mag都转换成需要的单位,注意这里acc使用的最终数据需要是以g为单位的。
2.对过程噪声协方差Q为1 ,量测噪声协方差R为100。
3.对陀螺仪的零偏校准就比较简单粗暴了,直接取了前三十个值平均计算。
4.磁力计校准采用的是常规的最小二乘法,最后做归一化处理。
%% INITIALIZING
g = 9.8;
unit_transform_acc = 16384;
unit_transform_gyro = (pi/(180*131));
unit_transform_mag=0.6;
Gyro_Compen_k = 30;
Mag_Compen_k = 1000;
ref_mag = 30;
DATA_SI = (size(DATA));
N_Q = 1;
N_R = 100;
N_P = 1;
%% LSB to SI Unit
for k = 1:Nsamples
%Acc LSB -> N/m^2
DATA_SI(1,k)= (g/unit_transform_acc)*DATA(1,k);
DATA_SI(2,k)= (g/unit_transform_acc)*DATA(2,k);
DATA_SI(3,k)= (g/unit_transform_acc)*DATA(3,k);
%Gyro LSB -> deg/s -> rad/s
DATA_SI(4,k)= (unit_transform_gyro)*DATA(4,k);
DATA_SI(5,k)= (unit_transform_gyro)*DATA(5,k);
DATA_SI(6,k)= (unit_transform_gyro)*DATA(6,k);
%Mag LSB -> uT
DATA_SI(7,k)= unit_transform_mag*DATA(7,k);
DATA_SI(8,k)= unit_transform_mag*DATA(8,k);
DATA_SI(9,k)= unit_transform_mag*DATA(9,k);
%Time ms -> s
DATA_SI(10,k)= DATA(10,k)/1000;
end
%% Gyroscope Compensation
for k = 1:Gyro_Compen_k
Bias_GyroX=mean(DATA_SI(4,k));
Bias_GyroY=mean(DATA_SI(5,k));
Bias_GyroZ=mean(DATA_SI(6,k));
end
Bias_Gyro = [Bias_GyroX Bias_GyroY Bias_GyroZ]
for k = 1:Nsamples
DATA_SI(4,k)=DATA_SI(4,k)-Bias_GyroX;
DATA_SI(5,k)=DATA_SI(5,k)-Bias_GyroY;
DATA_SI(6,k)=DATA_SI(6,k)-Bias_GyroZ;
end
%% Magnetometer Compensation
for k = 1:Mag_Compen_k
Y(k,:) = [DATA_SI(7,k)^2+DATA_SI(8,k)^2+DATA_SI(9,k)^2];
X(k,:) = [DATA_SI(7,k) DATA_SI(8,k) DATA_SI(9,k) 1];
end
N_X = [size(X)];
Xsamples = N_X(2);
Bias_Mag = 0.5*((X'*X)\eye(Xsamples))*X'*Y
for k = 1:Nsamples
DATA_SI(7,k) = DATA_SI(7,k) - Bias_Mag(1);
DATA_SI(8,k) = DATA_SI(8,k) - Bias_Mag(2);
DATA_SI(9,k) = DATA_SI(9,k) - Bias_Mag(3);
end
%% Set Reference Magnetic vector (NORMALIZATION)
M=sqrt(DATA_SI(7,ref_mag)^2+DATA_SI(8,ref_mag)^2+DATA_SI(9,ref_mag)^2);
B=[DATA_SI(7,ref_mag)/M DATA_SI(8,ref_mag)/M DATA_SI(9,ref_mag)/M];然后传到EKF函数中处理,传入参数为,Gyro三轴数据p、q、r,归一化的磁场向量B,Mag三轴数据mx、my、mz,三轴Acc数据ax、ay、az,时间戳dt,三个协方差参数,Q、R、P。
1.利用isempty做初始化。
2.使用Gyro的数据作为先验估计值,Acc和Mag作为测量值进行校正。
3.F雅各比矩阵用于预测步骤,描述四元数随时间的变化率。F矩阵的计算基于四元数的微分方程。
这里其实我自己不是很明白为什么,查询资料:
四元数的微分方程是描述四元数随时间变化的数学表达式。在三维空间中,四元数常用于表示物体的姿态,因为它可以避免万向节死锁问题。四元数的微分方程与角速度(p, q, r)有关,这些角速度描述了物体绕三个轴的旋转速度。
四元数的微分方程可以表示为:
\[
\frac{d\mathbf{q}}{dt} = \frac{1}{2} \mathbf{q} \otimes \mathbf{\omega}
\]
其中,\(\mathbf{q} = [q_0, q_1, q_2, q_3]^T\) 是四元数,\(\mathbf{\omega} = [0, p, q, r]^T\) 是角速度四元数,\(\otimes\) 表示四元数乘法。
将这个微分方程离散化,可以得到四元数的预测方程:
\[
\mathbf{q}_{k+1} = \mathbf{q}_k + \frac{1}{2} \mathbf{q}_k \otimes \mathbf{\omega}_k \Delta t
\]
其中,\(\Delta t\) 是时间步长。
为了将这个方程写成矩阵形式,我们需要将四元数乘法展开。四元数乘法的展开形式为:
\[
\mathbf{q} \otimes \mathbf{\omega} = \begin{bmatrix}
q_0 & -q_1 & -q_2 & -q_3 \\
q_1 & q_0 & q_3 & -q_2 \\
q_2 & -q_3 & q_0 & q_1 \\
q_3 & q_2 & -q_1 & q_0
\end{bmatrix}
\begin{bmatrix}
0 \\
p \\
q \\
r
\end{bmatrix}
\]
将这个乘法结果代入预测方程,可以得到:
\[
\mathbf{q}_{k+1} = \mathbf{q}_k + \frac{1}{2} \begin{bmatrix}
-q_1 p - q_2 q - q_3 r \\
q_0 p + q_2 r - q_3 q \\
q_0 q - q_1 r + q_3 p \\
q_0 r + q_1 q - q_2 p
\end{bmatrix} \Delta t
\]
将这个方程写成矩阵形式,可以得到F雅各比矩阵:
\[
F = \begin{bmatrix}
1 & -\frac{1}{2} p \Delta t & -\frac{1}{2} q \Delta t & -\frac{1}{2} r \Delta t \\
\frac{1}{2} p \Delta t & 1 & \frac{1}{2} r \Delta t & -\frac{1}{2} q \Delta t \\
\frac{1}{2} q \Delta t & -\frac{1}{2} r \Delta t & 1 & \frac{1}{2} p \Delta t \\
\frac{1}{2} r \Delta t & \frac{1}{2} q \Delta t & -\frac{1}{2} p \Delta t & 1
\end{bmatrix}
\]
因此,F雅各比矩阵的元素反映了四元数的微分方程,它描述了四元数随时间的变化率。
这里其实是一个离散化处理。
4.H雅各比矩阵用于校正步骤,描述四元数与测量值(加速度和磁场)之间的关系。H矩阵的计算基于四元数到加速度和磁场的转换方程。
function [q0, q1, q2, q3] = EKF(p, q, r, B, mx, my, mz, ax, ay, az, dt, N_Q, N_R, N_P)
%
%
global Q R
global x P
global firstRun
%Initialize
if isempty(firstRun)
Q = N_Q*eye(4);
R = N_R*eye(6);
x = [1 0 0 0]';
P = N_P*eye(4);
firstRun = 1;
end
%1.Predict xp and Pp
%Calculate F
F = Fjacob(p, q, r, dt);
xp = F*x;
Pp = F*P*F' + Q;
%2.Correct xp and P
%Calculate H
H = Hjacob(x(1),x(2),x(3),x(4), B);
S= (H*Pp*H' + R);
K = Pp*H'*(S\eye(6));
z = [ax;
ay;
az;
mx;
my;
mz];
x = xp + K*(z - H*xp);
P = Pp - K*H*Pp;
x_sc=(x(1)^2+x(2)^2+x(3)^2+x(4)^2)^0.5;
q0 = x(1);
q1 = x(2);
q2 = x(3);
q3 = x(4);
%------------------------------
function F = Fjacob(p, q, r, dt)
%
%
F = zeros(4);
F(1,1)=1;
F(1,2)= -p*dt/2;
F(1,3)= -q*dt/2;
F(1,4)= -r*dt/2;
F(2,1)= p*dt/2;
F(2,2)=1;
F(2,3)= r*dt/2;
F(2,4)=-q*dt/2;
F(3,1)=q*dt/2;
F(3,2)=-r*dt/2;
F(3,3)=1;
F(3,4)=p*dt/2;
F(4,1)=r*dt/2;
F(4,2)=p*dt/2;
F(4,3)=-q*dt/2;
F(4,4)=1;
%------------------------------
function H = Hjacob(qt0, qt1, qt2, qt3, B)
%
%
g=9.8;
H = zeros(6,4);
H(1,1) = -qt2;
H(1,2) = qt3;
H(1,3) = -qt0;
H(1,4) = qt1;
H(2,1) = qt1;
H(2,2) = qt0;
H(2,3) = qt3;
H(2,4) = qt2;
H(3,1) = qt0;
H(3,2) = -qt1;
H(3,3) = -qt2;
H(3,4) = qt3;
H(4,1) = qt0*B(1)+qt3*B(2)-qt2*B(3);
H(4,2) = qt1*B(1)+qt2*B(2)+qt3*B(3);
H(4,3) = -qt2*B(1)+qt1*B(2)-qt0*B(3);
H(4,4) = -qt3*B(1)+qt0*B(2)+qt1*B(3);
H(5,1) = -qt3*B(1)+qt0*B(2)+qt1*B(3);
H(5,2) = qt2*B(1)-qt1*B(2)+qt0*B(3);
H(5,3) = qt1*B(1)+qt2*B(2)+qt3*B(3);
H(5,4) = -qt0*B(1)-qt3*B(2)+qt2*B(3);
H(6,1) = qt2*B(1)-qt1*B(2)+qt0*B(3);
H(6,2) = qt3*B(1)-qt0*B(2)-qt1*B(3);
H(6,3) = qt0*B(1)+qt3*B(2)-qt2*B(3);
H(6,4) = qt1*B(1)+qt2*B(2)+qt3*B(3);最后画图处理,这里作者是动态呈现的,就不详细展示了,贴一个最终欧拉角的展示图。
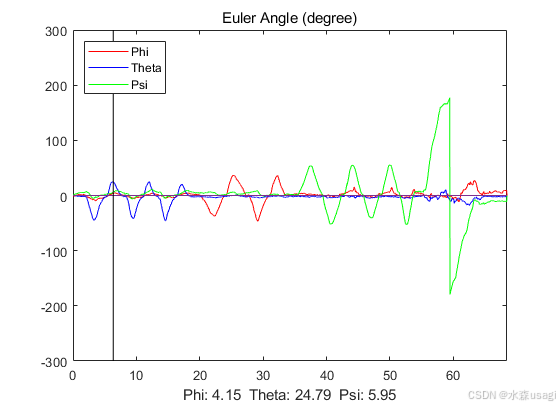
总结:其实是一个很经典的流程,作者逻辑也比较清晰简洁,适合初学者参考理解,其中很多细节并不太适合实际应用,但是可以替换尝试。
我最初接触到这套代码实际上是半年前,花了钱在csdn上买的,但后来又兜兜转转在github上下载到了,也是想分享给跟我一样的小白,只求一个关注,如果能点赞收藏支持我一下就更好啦~祝大家学习顺利~
项目源码Github:https://github.com/Chang-yup/IMU_Kalman-filter_MATLAB
如果GitHub实在进不去可以留言给我处理


















 1327
1327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









