







之前看的HDMapNet和VectorMapNet虽然能够处理矢量化地图,但是速度都比较慢,而且效果也不是非常好。在HDMapNet中由于后处理导致处理慢;在VectorMapNet由于序列化生成时速度慢使得结果生成慢;这些模型难以满足实时在线建图的要求,MapTR 模型正是在这样的背景下应运而生,它通过端到端的 Transformer 架构,矢量化建模,实现了高效、准确的在线矢量化地图构建。本文将从模型创新、各模块的概念(包括为何需要该模块、作用及其工作机制)、代码实现细节和实验效果等多个角度,带大家深入解析 MapTR 模型。有没讲清楚的地方,希望大家提出建议,一起学习
论文地址:https://arxiv.org/pdf/2208.14437
HDMapNet详解:HDMapNet 模型详解:端到端高精地图构建的创新之路-CSDN博客
VectorMapNet详解:VectorMapNet 模型详解:高效构建矢量地图的全新思路_vector map builder 矢量地图在线工具-CSDN博客
1. 模型创新点及其原理
1.1 排列等效建模 —— 消除排列歧义
1.1.1背景(为什么需要它):
在之前模型的地图元素建模中,通常用一个有序点集来表示元素,但对于闭合多边形或开放折线来说,其点集排列并非唯一。例如,闭合多边形具有循环对称性,任何顶点都可作为起点;而开放折线存在正序与逆序两种等价排列。下面举个例子说明一下(知道的同学可以跳过):
假设我们有一个地图元素,比如一个闭合多边形,它由若干个顶点构成。由于闭合多边形具有循环对称性,任何一个顶点都可以作为起点,顺序向后循环排列都能得到同样的形状。例如,点集 {v0,v1,v2,…,vN−1}与 {v1,v2,…,vN−1,v0} 表示的多边形在几何上完全一致,起点不同。对于开放折线,还存在正序和逆序两种等价的排列。如果我们在监督阶段强制模型输出一种固定的排列顺序,就会出现以下问题:
-
失去内在对称性信息:本质上相同的形状会有多种合法的排列方式,固定顺序会将这些等价表达人为区分开,导致模型可能预测出另一种完全正确但排列不同的结果,却因为与固定顺序不一致而被判定为错误。
-
监督信号冲突:由于实际的GT(Ground Truth)本身没有唯一确定的排列,固定的排列方式会使得损失函数对预测顺序异常敏感。比如,一个微小的循环位移或者方向翻转,都可能引入较大误差,这就使得学习过程不稳定,从而影响最终模型性能。
-
额外负担:模型除了需要捕捉地图元素的几何形状之外,还要学会如何将点按特定顺序排列,这其实是无关紧要的“噪声”。这种额外约束会分散模型对核心几何信息的关注,导致收敛速度变慢,效果也可能不如预期。
1.1.2如何解决
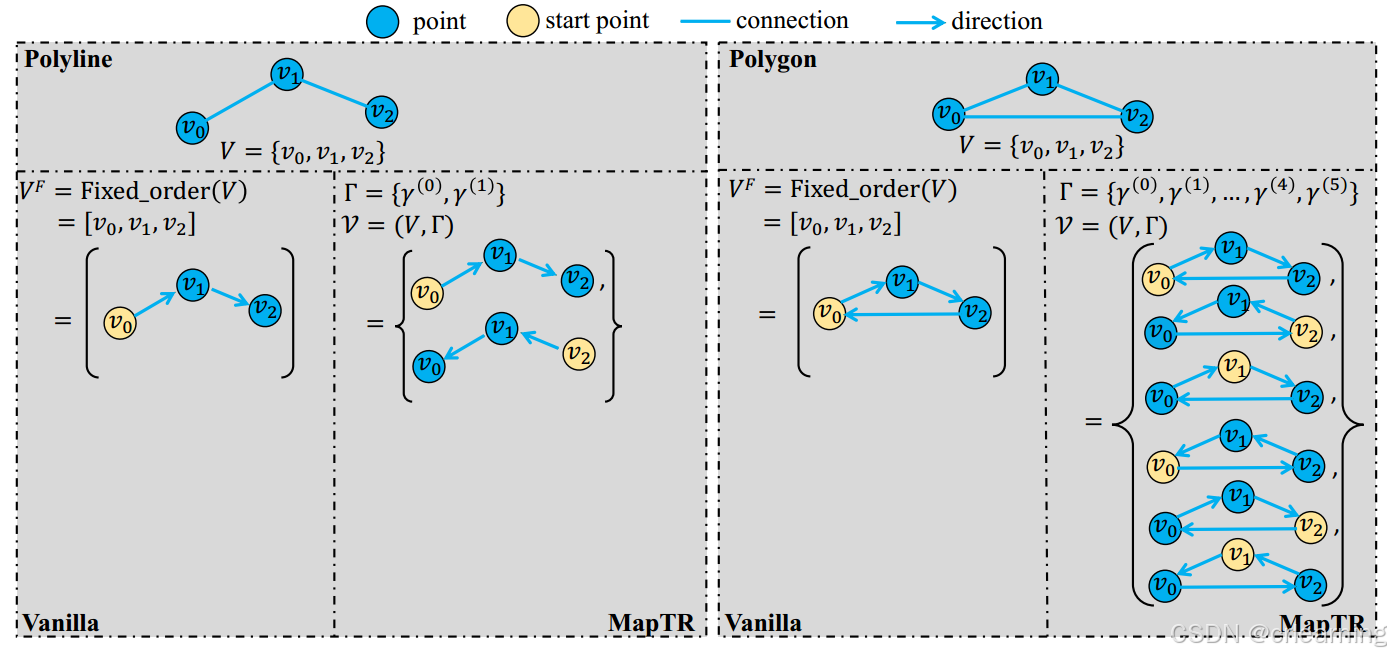
为了解决这些问题,MapTR 提出了排列等效建模的思想,即把地图元素表示为点集和一组所有可能的等价排列集合,让匹配过程自动选择最合适的排列来计算损失,从而避免了人为固定排列带来的模糊性和监督矛盾。这种方法既能准确描述元素的几何形状,也能使模型训练过程更加稳定和高效。
MapTR 提出将地图元素表示为 V=(V,Γ) 的二元组,其中
- V 表示点集,
- Γ 表示所有可能的等价排列集合。
在训练时,模型只需预测点集 V^hat;损失计算阶段,会遍历预定义的排列集合 Γ 以找到与预测结果最匹配的排列,从而消除排列歧义问题,使得监督信号更稳定、收敛更快。
下图表明了折线和多边形的两种排列集合。
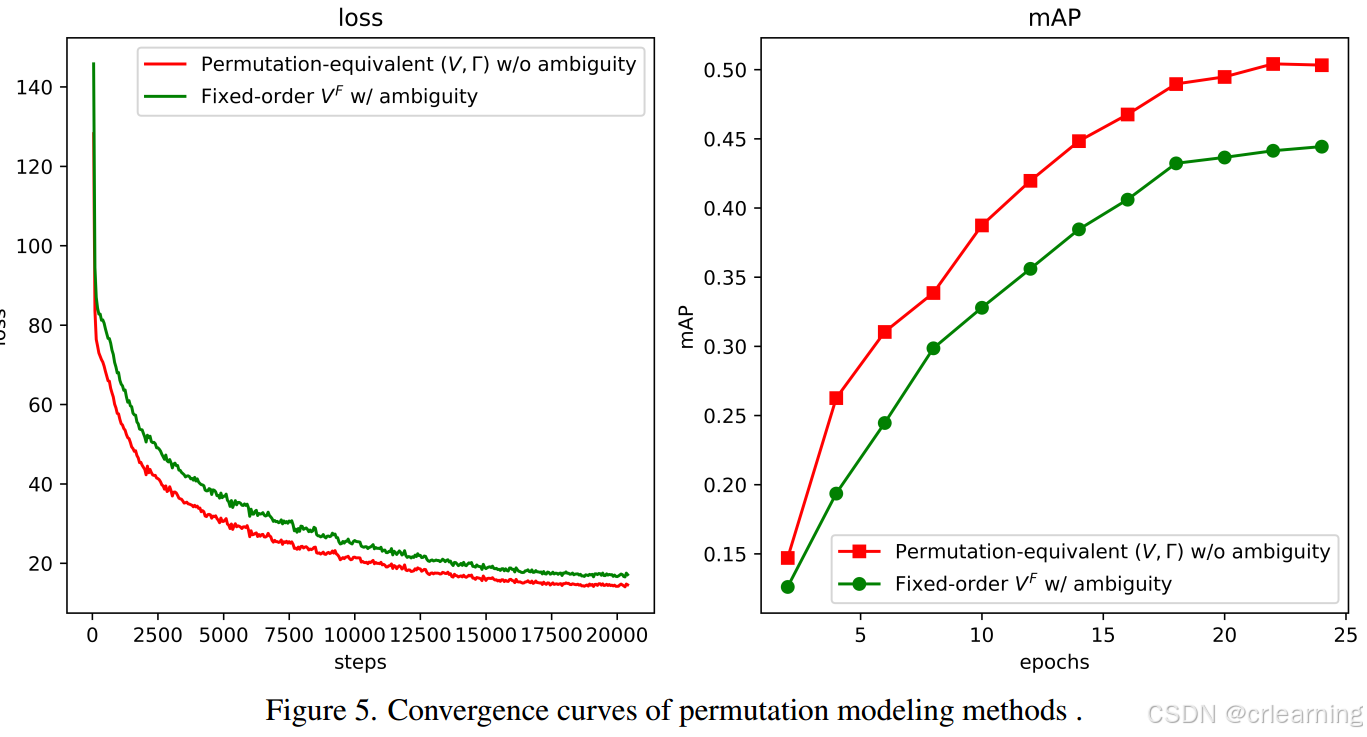
1.1.3 消融实验效果
从指标和收敛速度来看,采用等效排列的方式确实能够给模型带来优势

1.2分层查询嵌入与分层匹配 —— 全局与局部信息兼顾
1.2.1 背景
在在线地图构建中,需要识别两个关键信息:
- 全局信息(哪里有线):需要识别整个地图元素的存在、类别和大致位置;
- 局部信息(线是否贴合):需要精细回归出地图元素的边界点,以精确描述其形状。
传统方法往往难以同时兼顾这两方面,导致整体识别与细节回归之间存在矛盾或信息丢失。
是否可以在transformer中query初始化利用这两个信息进行建模,从而提升模型性能呢?
1.2.2 模块实现
MapTR 采用分层查询嵌入策略,将查询分为两类:
- 实例级查询
:负责捕捉整体信息,判断元素的存在及类别;
- 点级查询
:专注于元素内部细节,用于精确预测几何点坐标。
两者通过简单相加生成最终的分层查询:
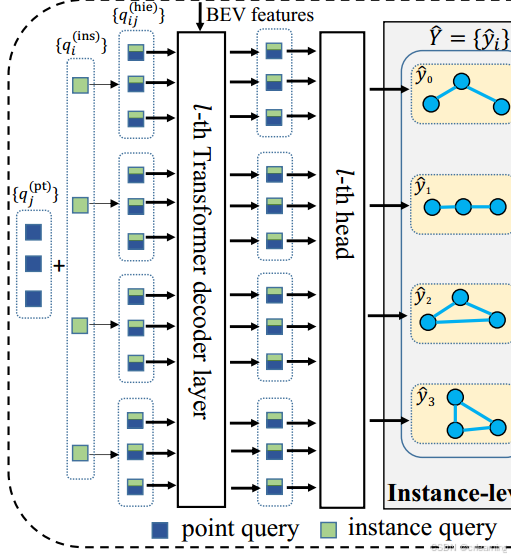
在模型中:
- 全局层面:实例级查询确保模型能整体识别出地图元素,类似于目标检测中的候选框生成;
- 局部层面:点级查询则负责对每个实例进行精细点回归。
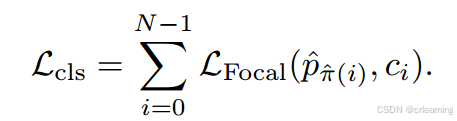
训练时,MapTR 先通过实例级匹配确定预测与 GT 实例的对应关系,再在局部层面进行点级匹配和损失计算(如曼哈顿距离、边缘方向损失),实现全局与局部的有机融合。
首先为匹配cost:先进行实例。再进行点集匹配
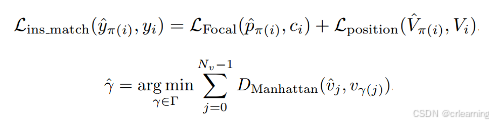
总体损失分为三块:类别损失,点到点距离,边方向损失
![]()


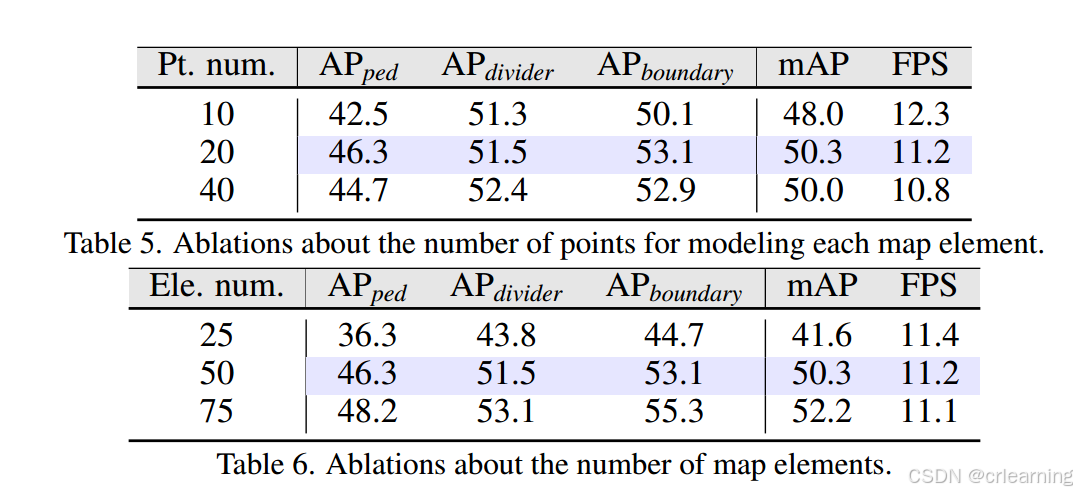
1.2.3 消融实验
对实例query和point query采用不同的数量,结果也会不同,选取最优搭配
1.3 端到端 Transformer 架构 —— 高效信息交互与实时推理
端到端方法能够:
- 简化流程:直接从原始图像到矢量地图输出,无需繁杂的后处理;
- 充分利用全局信息:Transformer 的自注意力机制能够捕捉长距离依赖,提升整体预测准确性。
MapTR 借鉴 DETR 思路构建了编码器-解码器结构:
- 地图编码器:负责将来自车载相机的多视角图像特征转换为统一的鸟瞰视图(BEV)特征。这里引入了 2D-to-BEV 模块(如 GKT),通过几何投影将各视角信息融合到一个 BEV 表示中。
- 地图解码器:基于分层查询嵌入,对 BEV 特征进行多层迭代更新,实现查询与特征的充分交互,最终输出地图元素的类别和点集坐标。
这种设计使得模型可以一次性并行预测所有地图元素,同时通过自注意力机制实现信息的全局交互,从而达到高精度与实时性的双重要求。
2.代码结构
结合 GitHub 代码仓库中主要目录 mmdetection3d、projects(模型位置) 和 tools,下面详细介绍各部分在代码中的实现思路。
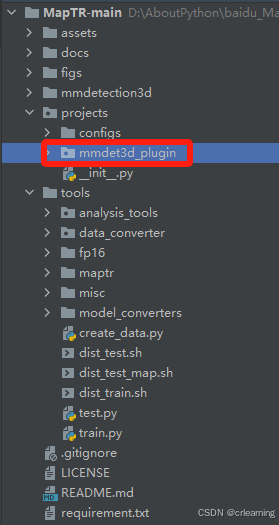
2.1mmdetection3d
为什么需要它?
- 复用成熟框架:mmdetection3d 是 OpenMMLab 提供的成熟 3D 检测框架,具有完善的数据处理、训练和评估流程。
- 降低开发成本:通过在该框架上进行定制化扩展,可以快速实现 MapTR 的核心功能,避免重复造轮子
在该目录中,MapTR 利用 mmdetection3d 的数据加载、模型训练和日志记录等基础模块,扩展实现与 3D 检测相关的额外组件。例如:
- 数据预处理模块对多视角图像进行处理;
- 与 BEV 转换相关的模块与损失函数接口也在此处集成,保证整个系统的统一性与高效性。
大家有兴趣可以去学习一下,里面封装了很多主流的模型
2.2 projects —— MapTR 项目专用实现(代码细节待更新)
config就是对应模型的配置文件,mmdet3d_plugin为模型的主要代码部分,maptr模型类在这个目录中: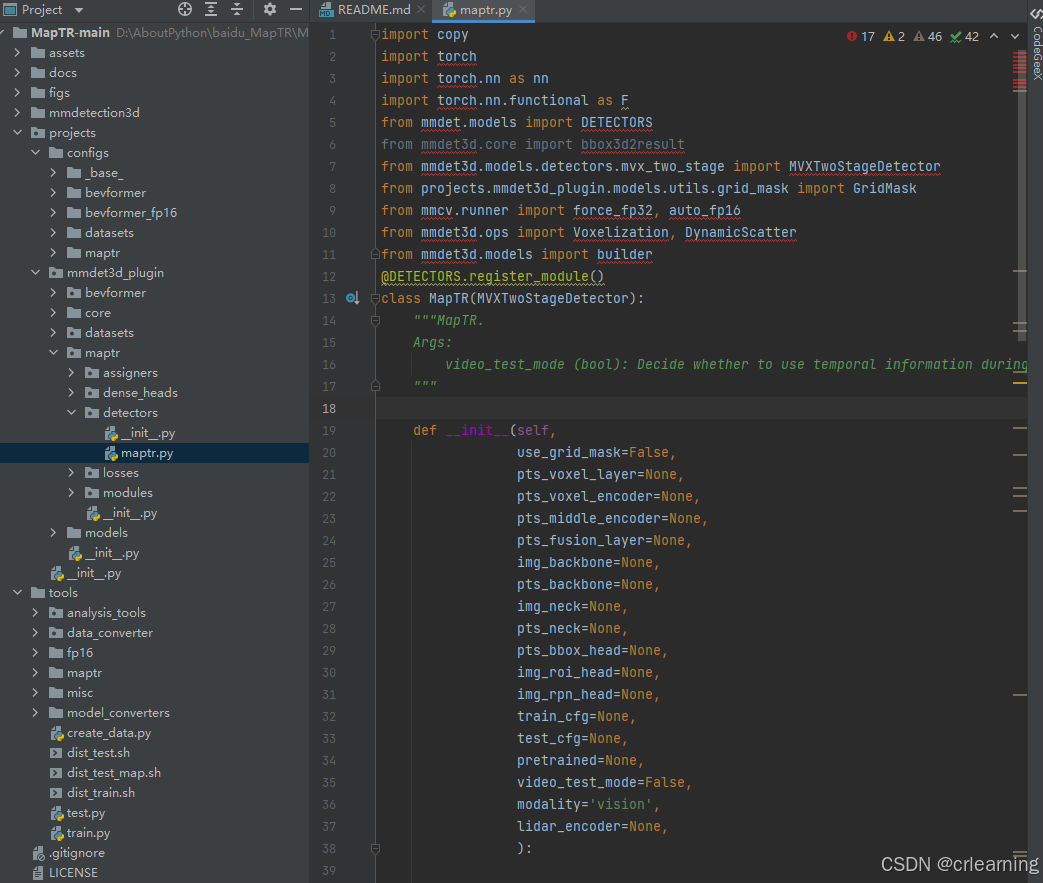
2.3 tools
训练、测试、评估以及部署量化,可视化脚本
在 tools 目录中,包含了:
- train.py:启动模型训练,读取配置文件并调用底层训练接口,实现数据加载、模型更新和日志记录。
- test.py:用于模型测试与评估,计算 AP 指标等性能度量。
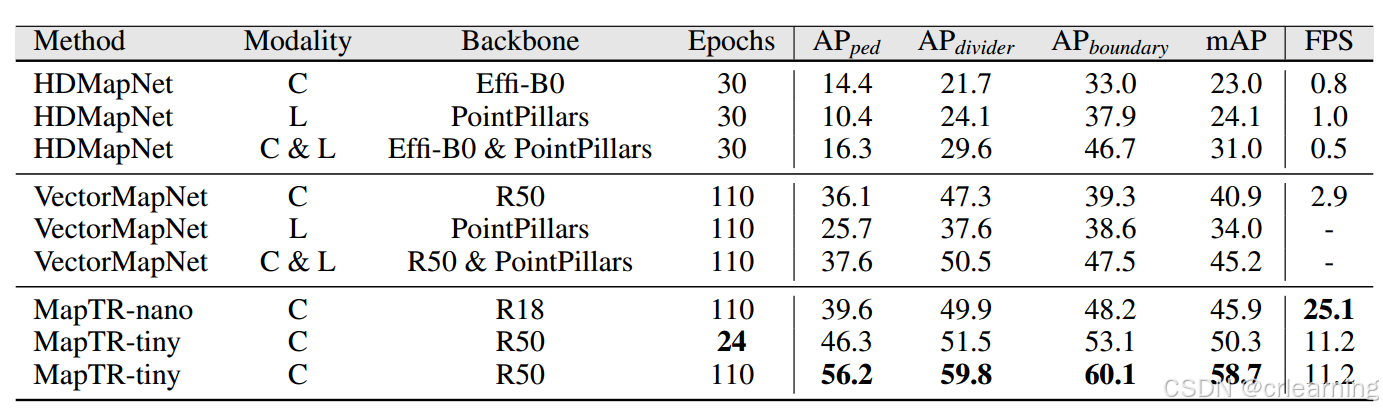
3 实验结果
远远超过了前两个模型的指标,不论是从混合结构还是单输入结构来看:
总结
MapTR 模型通过以下创新点实现了在线矢量化高精地图构建的突破:
- 排列等效建模:解决了地图元素点集排列不唯一导致的监督模糊性问题,使训练更加稳定;
- 分层查询嵌入与分层匹配:全局与局部信息兼顾,既确保整体元素检测,又精细回归局部几何细节;
- 端到端 Transformer 架构:借助 BEV 表示和全局信息交互,简化了传统多阶段流程,实现了实时高效推理。
从代码角度看,MapTR 在 mmdetection3d 目录中复用了成熟的 3D 检测框架,在 projects 目录中实现了项目专用的核心算法,而 tools 则提供了完整的训练、测试和评估流程。这种模块化设计不仅便于扩展和维护,也确保了从理论到工程实践的高效复现。
希望本文能帮助大家更好地理解 MapTR 模型的各个模块及其在整体系统中的作用。如果对本文内容有疑问或讨论,欢迎在评论区交流、点赞和收藏,共同学习进步!


















 749
749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











