







本章将介绍含有⾼斯随机变量的线性系统状态估计问题中的⼀些经典结论,包括重要的卡尔曼
滤波器
[2]
。我们从离散时间的
批量
(batch)优化问题开始讨论,这可以导出随后⾮线性情况下的⼀些 重要的结论,作为后⽂的铺垫。从批量式处理过程中,我们将导出递归式
(recursive)算法的流程。最后,我们再回到最⼀般的情况,处理连续时间运动模型,并把连续时间与离散时间的结论统⼀起来。此外,我们还能看到这些结论与机器学习领域的⾼斯过程回归有异曲同⼯之处。
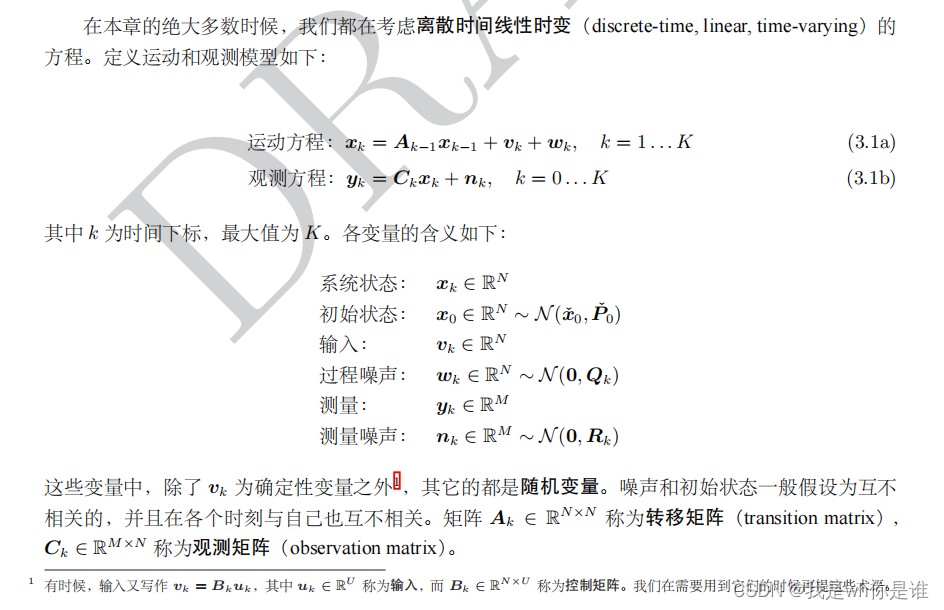
3.1离散时间的批量估计问题
1、问题定义
2、最大后验估计
这⾥省去了变量的下标,表⽰所有时刻(也就是时间下标从可能的最⼩值取到可能的最⼤值)
5
。请
注意我们已经把初始状态和输⼊量放在了⼀起,它们给出了先验的信息。然后我们再⽤观测数据来改
进这些先验信息。
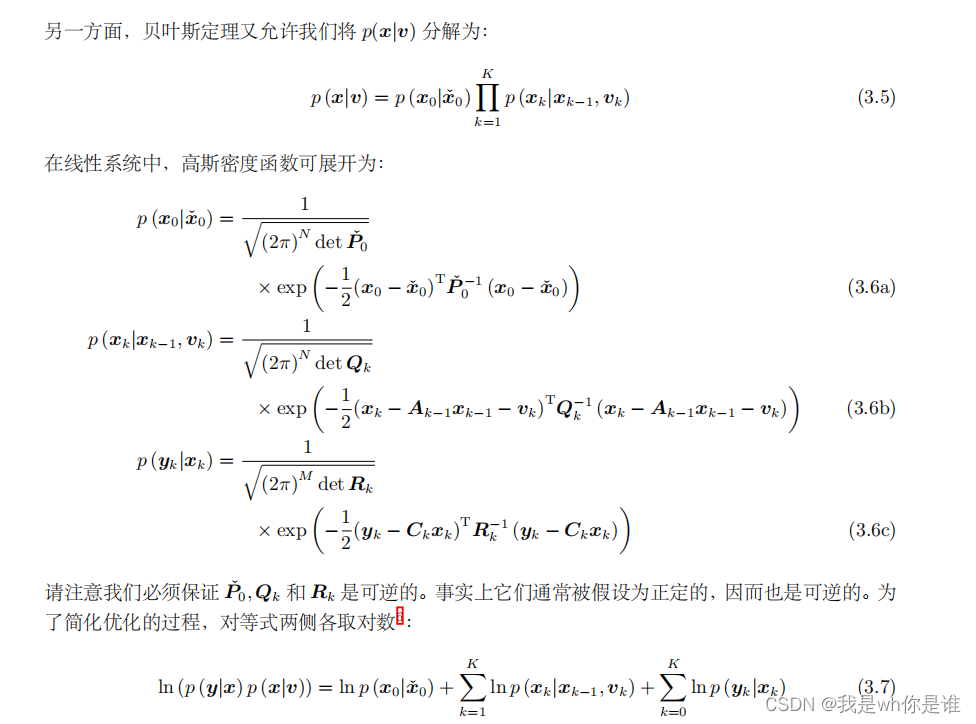
⾸先,⽤贝叶斯公式重写
MAP
估计:
这⾥我们把分母略去,因为它和
x
⽆关。同时省略
p
(
y
|
x
,
v
)
中的
v
,因为如果
x
已知,它不会影响
观测数据(观测⽅程与它⽆关)。
接下来我们要做出⼀个重要的假设:对于所有时刻
k
= 0
. . . K
,所有的噪声项
w
k
和
n
k
之间是
⽆关的。这使得我们可以⽤贝叶斯公式对
p
(
y
|
x
)
进⾏因⼦分解:

note:这里的两步分解我是不太理解,查了其他博客,理解过程如
note over
3、贝叶斯推断

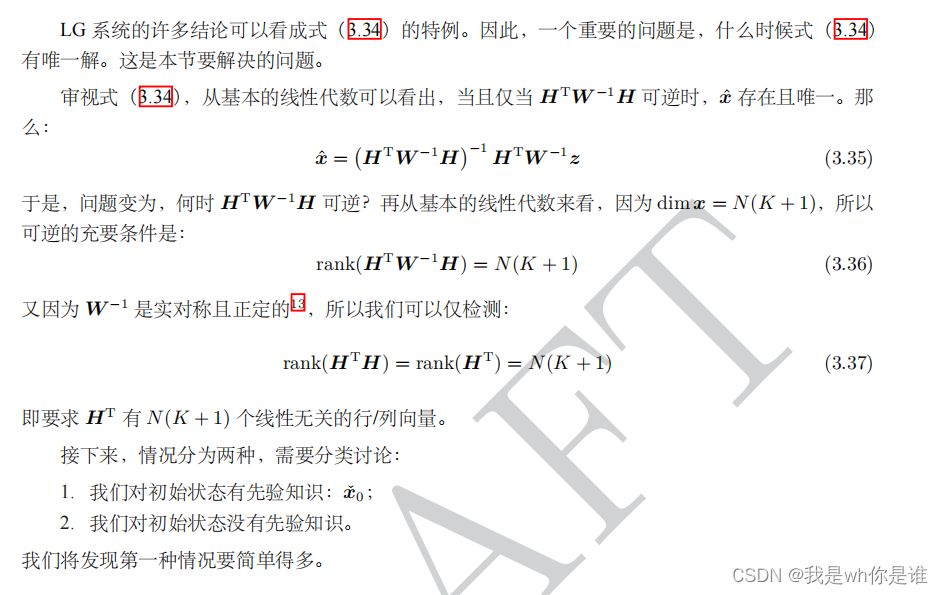
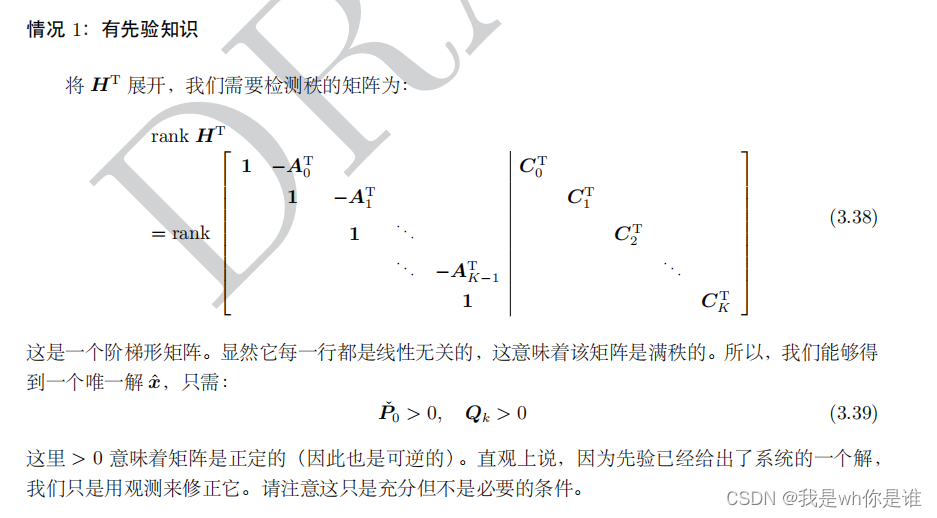
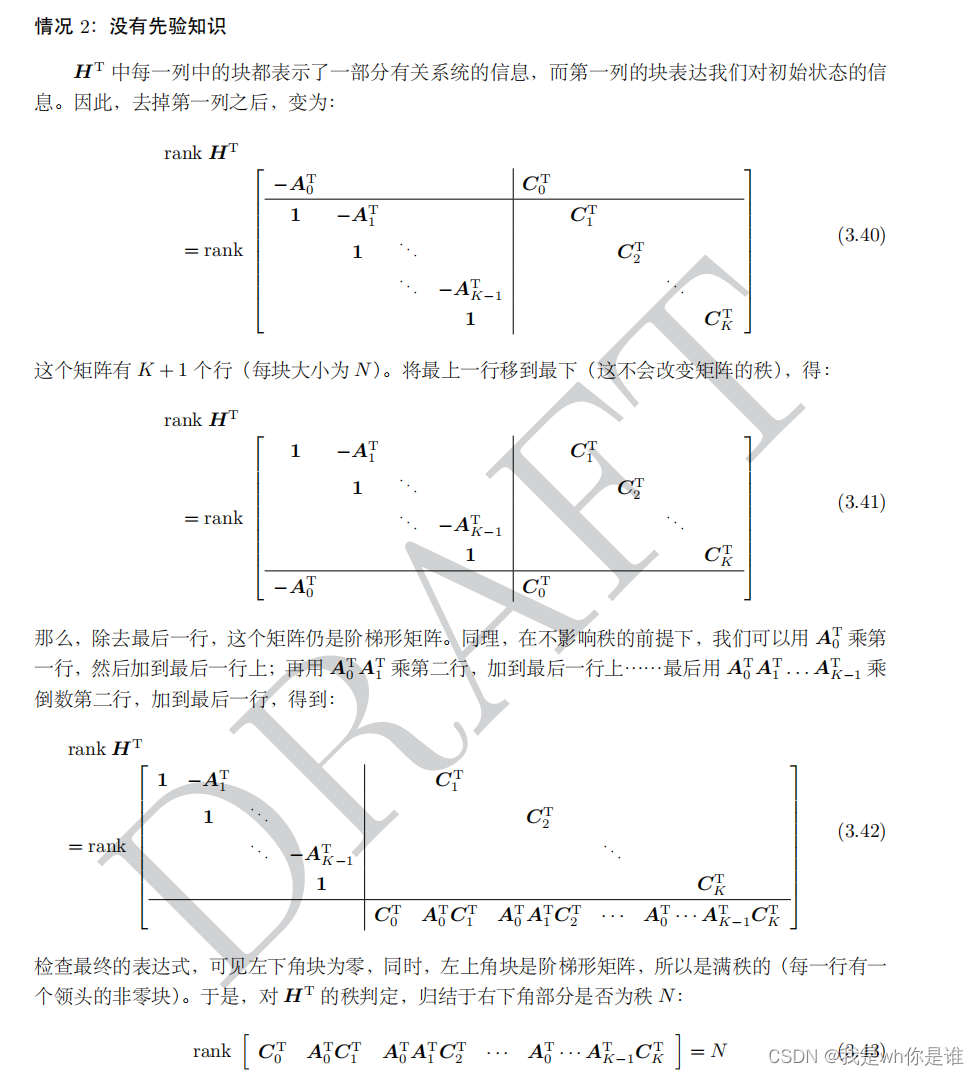
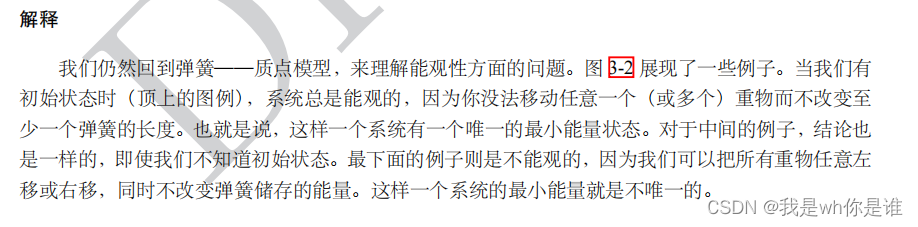
4、存在性,唯一性与能观性

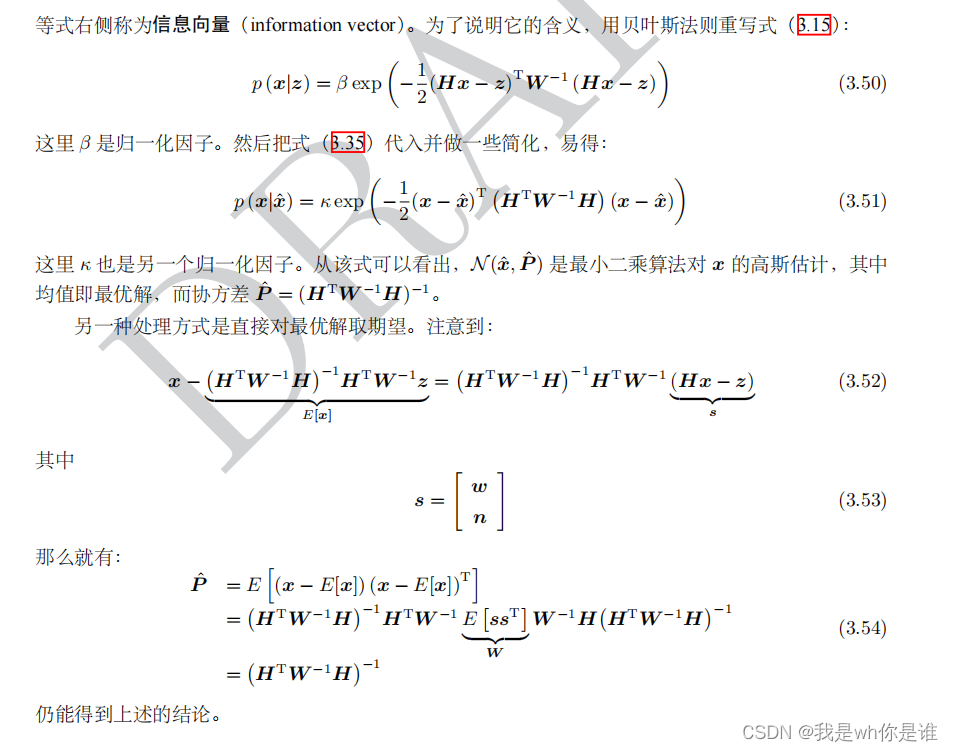
5、MAP协方差
















 7403
7403











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









