







 本文深入探讨了计算机视觉领域中的数学方法,包括等距变换、相似变换、仿射变换和射影变换的数学原理及其不变量。通过理解这些变换群,读者将能更好地掌握视觉特征的提取与分析。
本文深入探讨了计算机视觉领域中的数学方法,包括等距变换、相似变换、仿射变换和射影变换的数学原理及其不变量。通过理解这些变换群,读者将能更好地掌握视觉特征的提取与分析。
计算机视觉中的数学方法
1.4 变换群与不变量
这一章节讲的如果感觉不够细可以看一下MVG对应章节。

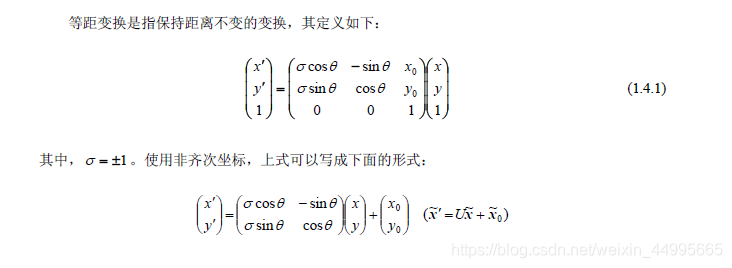
1.4.1 等距变换群
等距变换群
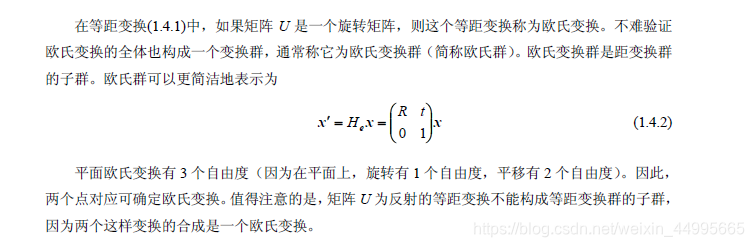
欧氏变换群
旋转和平移的复合,好像和等距一样。
旋转矩阵:RTR=RRT=I的正交矩阵。
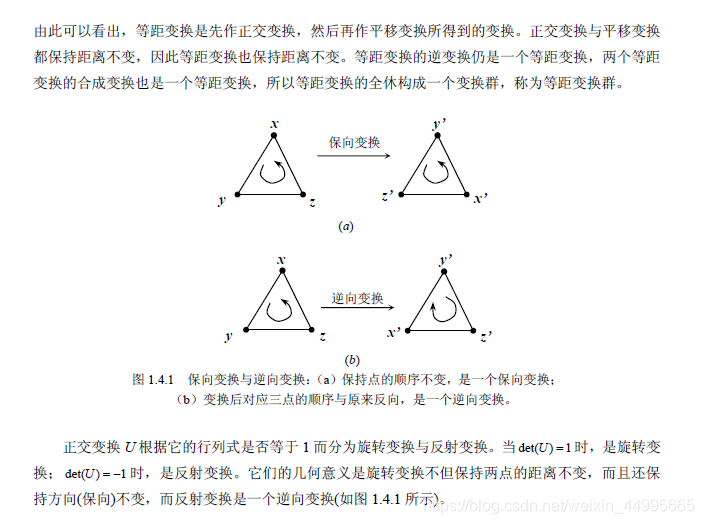
欧氏不变量
等距变换群的不变量主要有:两点的距离、两线的夹角、图形的面积等。由于欧氏群是等距变换群的子群,因此等距变换群的不变量也是欧氏不变量。下面给出一个在计算机视觉中经常使用的欧氏不变性质:

1.4.2 相似变换群
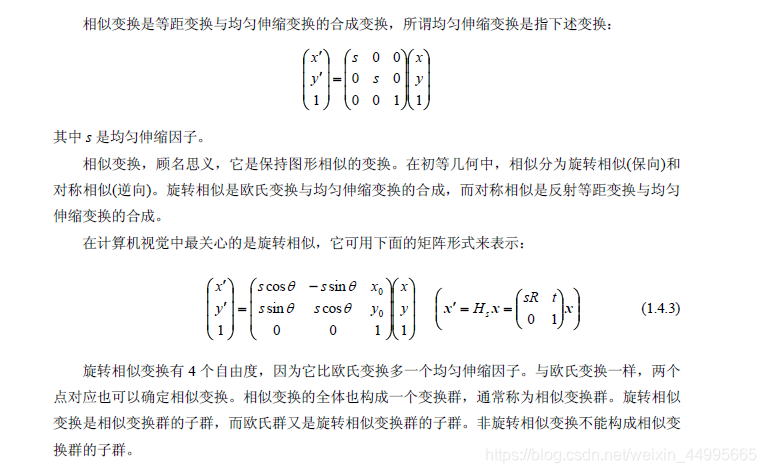
相似变换
相似不变量
相似变换群的不变量有:两直线的夹角,长度的比值,面积的比值。这些性质是非常容易验证的。下面的命题是非常重要的,因为它在计算机视觉中扮演着非常重要的角色。

1.4.3 仿射变换群
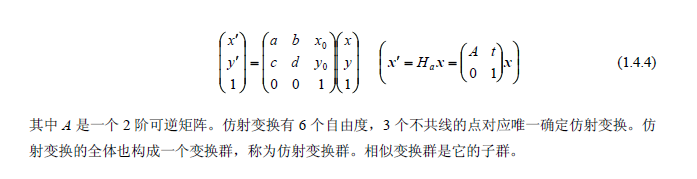
仿射变换
仿射变换定义为
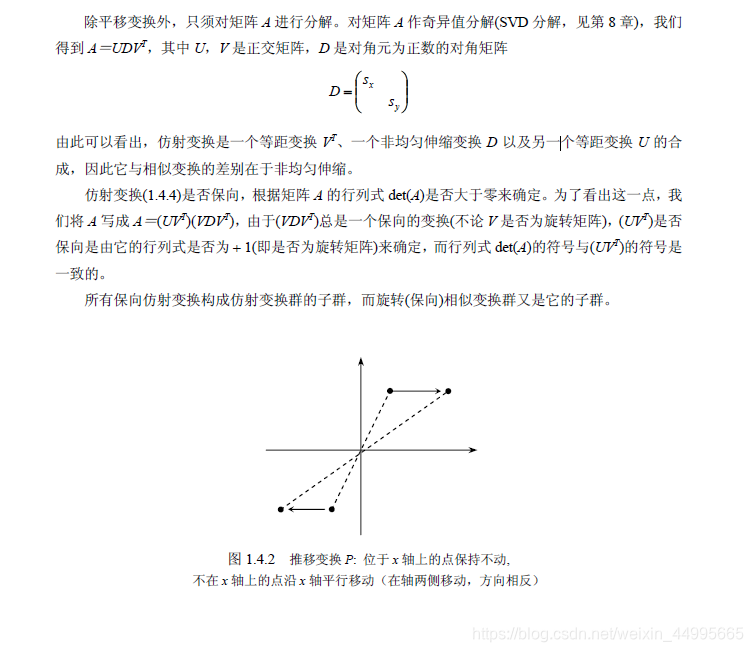
仿射变换的分解
对SVD及QR分解不了解也么有关系,先记住这里的结论,SVD、QR分解本身并不难。
SVD分解:
det(V)=1,D正数对角阵,det(VDVT)>0,也为保向
QR分解:
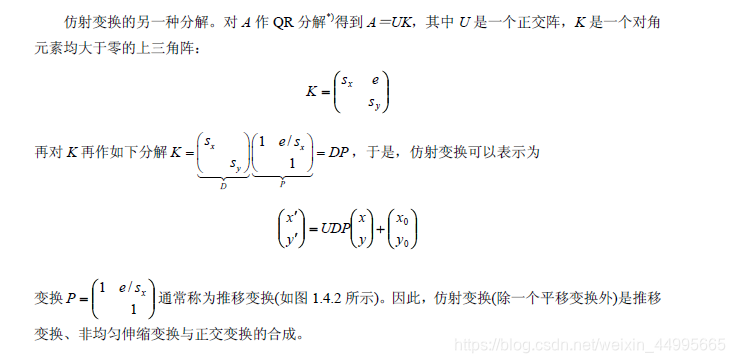
推移变换:y不变,x=(1+系数)x
仿射不变量

二次曲线的仿射分类

1.4.4 射影变换群
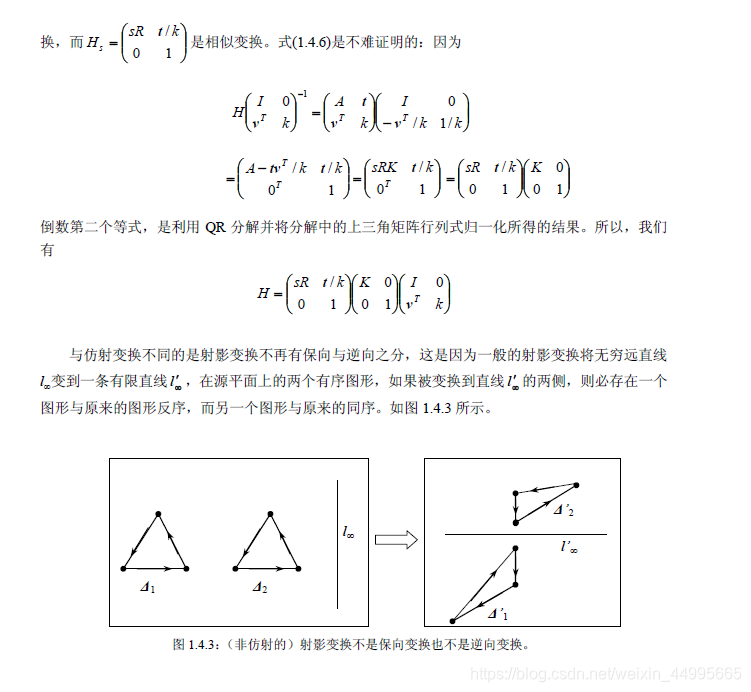
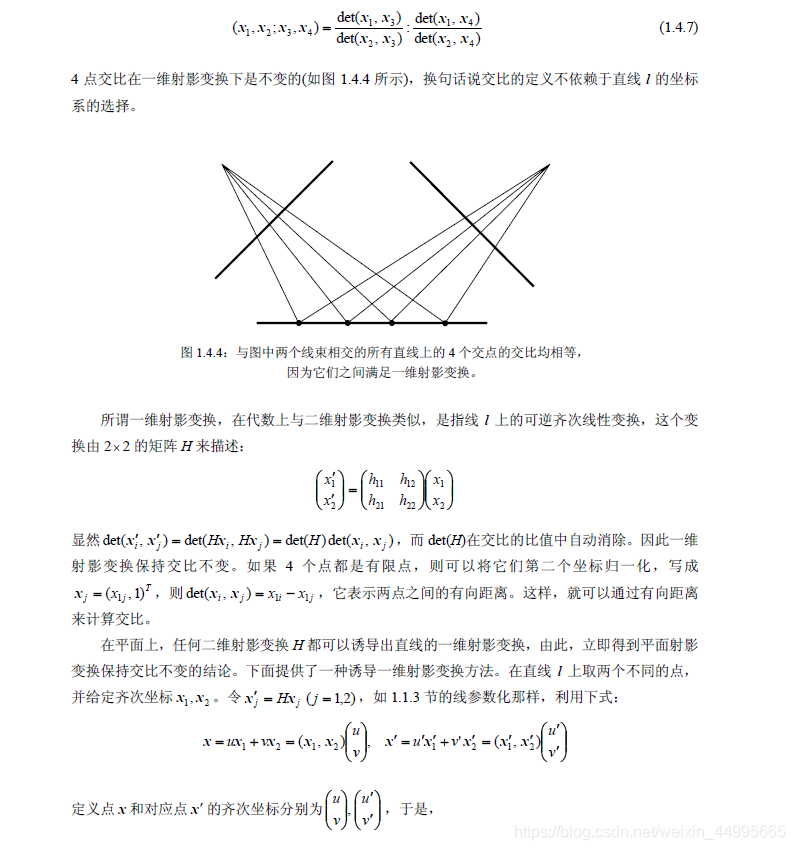
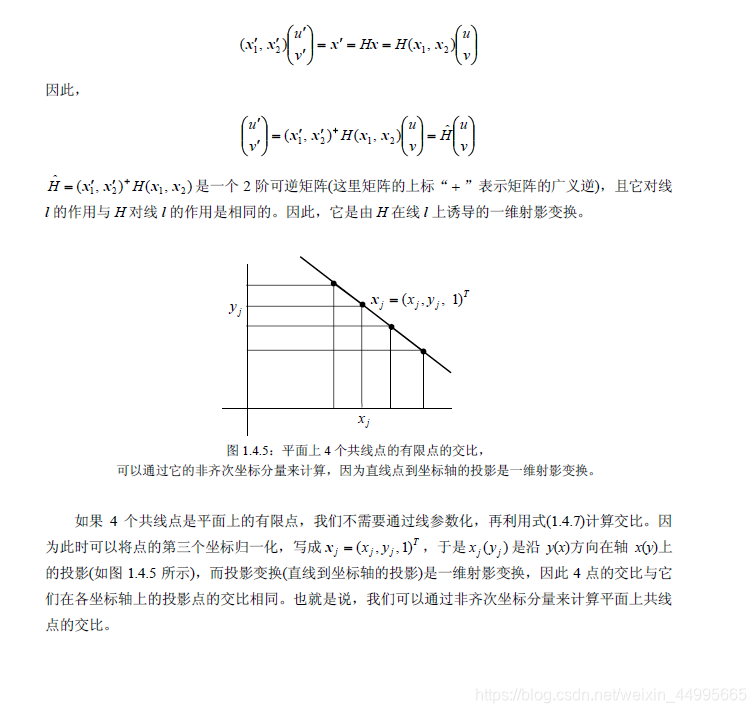
射影不变量


















 3628
3628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









