







 本篇博客详细介绍了GB/T 20608—2006和ISO 15622:2018两个关于自适应巡航控制(ACC)的标准,涵盖了标准的引言、范围、术语定义、系统类型、状态、性能要求和测试方法。内容包括ACC的控制策略、功能需求、驾驶员交互、系统状态转换、探测范围、目标识别能力等方面,旨在帮助读者理解ACC系统的开发与测试规范。
本篇博客详细介绍了GB/T 20608—2006和ISO 15622:2018两个关于自适应巡航控制(ACC)的标准,涵盖了标准的引言、范围、术语定义、系统类型、状态、性能要求和测试方法。内容包括ACC的控制策略、功能需求、驾驶员交互、系统状态转换、探测范围、目标识别能力等方面,旨在帮助读者理解ACC系统的开发与测试规范。
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
本节主要讲解ISO15622:2018 标准的内容,另外GB/T 20608—2006 标准再议。
2. ISO 15622:2018 标准解读
ISO 15622已经迭代了2002版、2010版和2018版等3个版本。值得注意的是, ISO 15622:2018增加了ISO 22179:2009全速自适应巡航控制系统的性能要求和测试方法,带来了3大变化:
- 车载设备被允许作为获取驾驶员指令的可能来源(set-speed-advise );
- 取消了弯道分类及相关条文;
- 不再禁止系统从“保持状态”自动启动,并且驾驶员能够通过车载设备控制系统(设置车速建议),提高了标准的可读性和可操作性。
2.1 Introduction/介绍
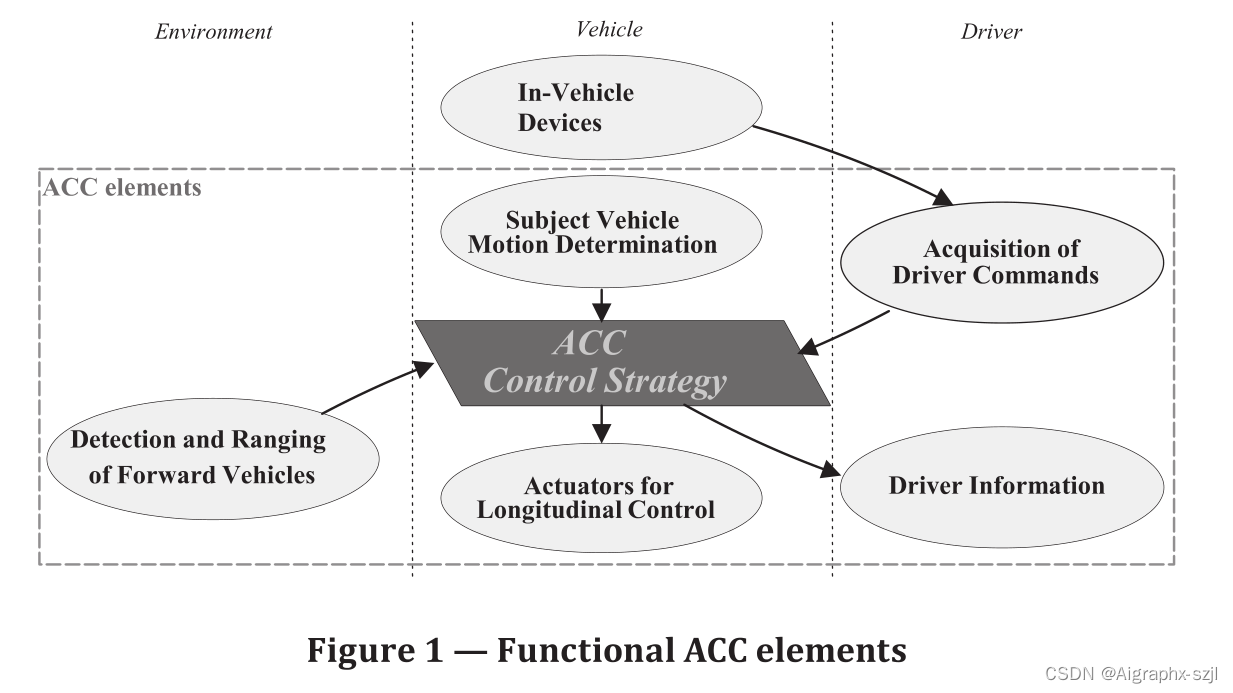
自适应巡航控制(ACC)的主要系统功能是利用以下信息自适应地控制车辆速度,以适应前方车辆。
- 与前方车辆的距离,
- 主车(配备ACC的)车辆的运动状态
- 驾驶员的指令(见下图1)。
根据所获得的信息,控制器(在图中确定为 "ACC控制策略")向执行器发送命令以执行其纵向控制策略,并且它还向驾驶员发送状态信息。可选地,驾驶员可以选择让ACC使用来自车载设备的设定速度建议。
ACC的目标是实现车辆纵向控制的部分自动化,减少驾驶员的工作量,目的是为驾驶员提供方便的支持和缓解。
通用的ACC系统包含两类:
全速全速自适应巡航控制系统ACC(Full Speed Range Adaptive Cruise Control,FSRA)
限速自适应巡航控制系统ACC(Limited Speed Range Adaptive Cruise Control,LSRA)
本文件可被其他标准用作系统级标准,将ACC扩展为更详细的标准,例如特定的探测和测距传感器概念或更高层次的功能。因此,这里将不考虑对探测和测距传感器功能、性能或合作解决方案的通信链路具体要求等问题。
2.2 Scope/范围
本文件包含自适应巡航控制(ACC)系统的基本控制策略、最低性能要求、与驾驶员基本的交互信息、故障诊断和故障时反应的最低要求以及性能测试流程。
自适应巡航控制系统(ACC)可分为全速(FSRA)和限速(LSRA)两种。限速LSRA又分为两类,即车辆配置手动或自动离合器。自适应巡航控制的基本目的是在高速公路(禁止非机动车和行人通行的道路)上自由行驶时,为装备的车辆提供纵向控制,对于FSRA类型的系统也适用于拥堵的交通状况。ACC还可以扩展到其他功能,如前方障碍物警告。对于FSRA类型的系统,系统将试图在其有限的减速能力范围内停在目标车辆后面,并在驾驶员向系统输入从静止状态恢复行驶的请求后能够再次启动。系统不需要对静止或缓慢移动的物体作出反应。
2.3 Terms and definitions/术语和定义
就本文件而言,适用下列术语和定义。
ISO和IEC在以下地址维护用于标准化的术语数据库:
IEC Electropedia:http://www.electropedia.org/
ISO Online:http://www.iso.org/obp/
Active brake control 主动制动控制:导致制动的功能,应由ACC系统控制,而不是由驾驶员实施。
Adaptive Cruise Control ACC 自适应巡航控制:对常规巡航控制系统的增强,通过控制发动机和/或动力传动系以及潜在的制动器,使被测车辆以适当的距离跟随前车。
Brake 制动:抵抗车辆运动的力。
Clearance 跟车间距:自车最前面到目标的物前车尾部面的距离。
Conventional Cruise Control 常规巡航控制:能够控制车辆按照驾驶员设定的车速行驶的系统。
Forward vehicle 前方车辆: 与本车车辆同向行驶、同路行驶的车辆。
Free-flowing traffic 交通流: 畅通和繁忙的交通,不包括停车和紧急制动的情况。
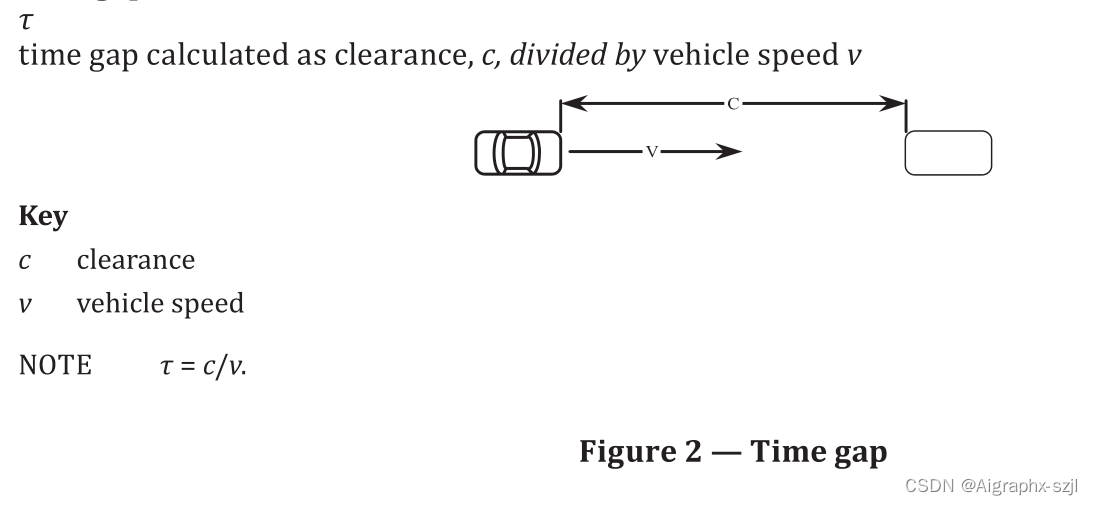
Time gap 跟车时距
Set speed 设定车速:所需的行驶速度,由驾驶员或ACC系统外部的某些控制系统设定。
备注:设定的速度是指在ACC控制下,车辆的最高理想速度。
Steady state 稳态:所述车辆参数的值不随时间、距离等变化的条件。
Subject Vehicle 本车车辆:装备了相关ACC系统的车辆,并与讨论的主题相关。
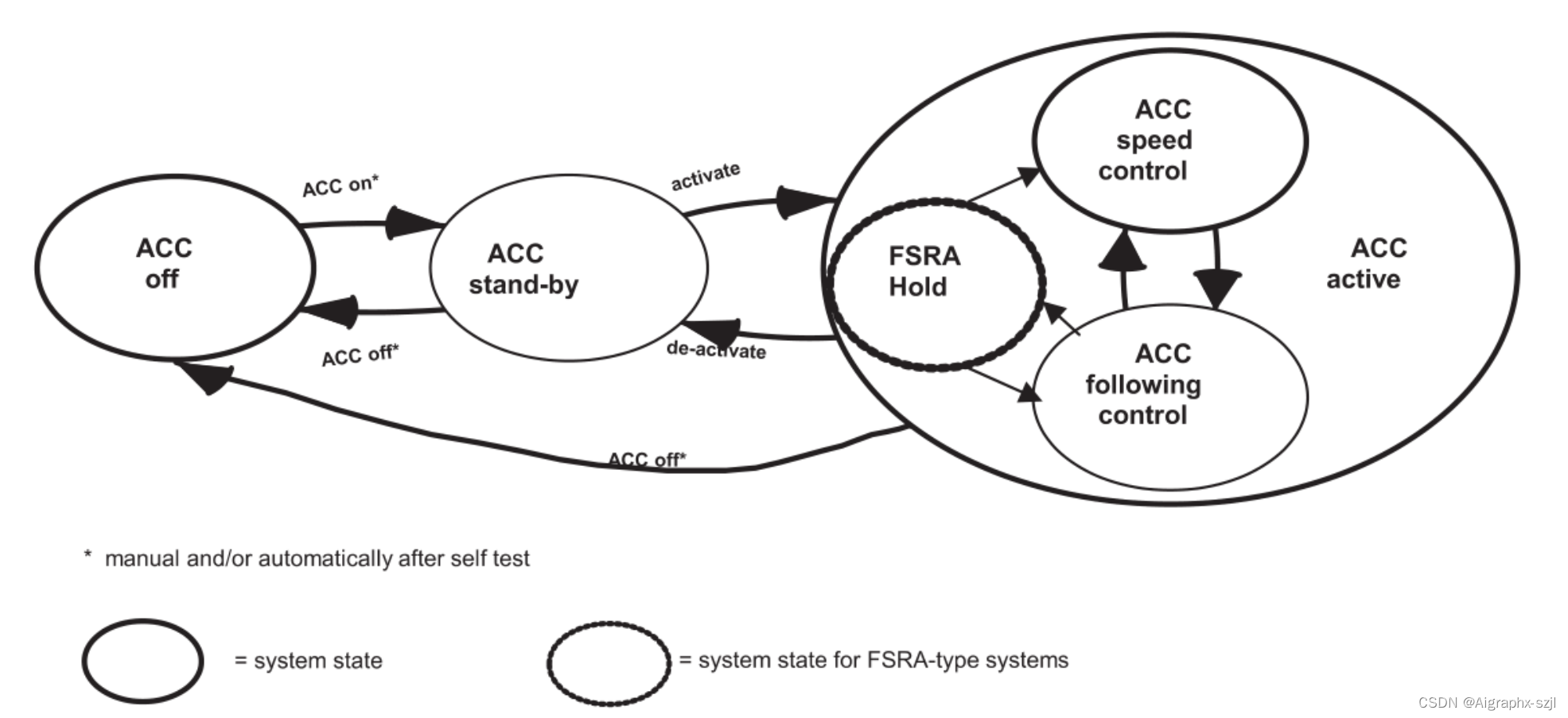
System states系统状态:系统运行的几个阶段或阶段之一。
ACC off state ACC关闭状态:在该阶段,直接访问激活 "ACC激活状态 "被禁用。
ACC Stand-by 状态:在此阶段,ACC系统没有进行纵向控制,系统准备由驾驶员激活。
ACC active state ACC激活状态:控制车辆速度和/或跟车间距。
ACC speed control state ACC速度控制状态:系统根据设定的速度控制车辆速度。
ACC following control sub-state ACC跟随控制子状态:系统根据选定的跟车时距控制与目标车辆的之间的跟车间距。
FSRA hold state FSRA 保持状态:系统在静止状态下处于激活状态。
备注:仅适用于FSRA型系统。
Target Vehicle 目标车辆:本车车辆跟随的车辆。
Stationary Object 静止目标:本车车辆前方静止的物体。
Slow Moving Object 缓慢移动的目标:被测车辆前方的物体,该物体在被测车辆中心线方向以小于MAX[1,0米/秒,被测车辆速度的10%]的速度移动。
Full Speed Range Adaptive Cruise Control(FSRA cruise control) 全速自适应巡航系统:自适应巡航控制系统类别,通过控制发动机和/或动力系统和制动系统,使本车车辆以适当的距离跟随前车行驶,甚至跟随前车到停车。
Limited Speed Range Adaptive Cruise Control(LSRA cruise control) 限速自适应巡航系统: 自适应巡航控制系统类别,通过控制发动机和(或)动力系统和制动系统,使本车车辆在超过一定的最低速度以适当的距离跟随前车行驶。
In-vehicle device 车载设备
制造商集成的设备,在不与外部设备主动通信的情况下提供ACC设定速度值。
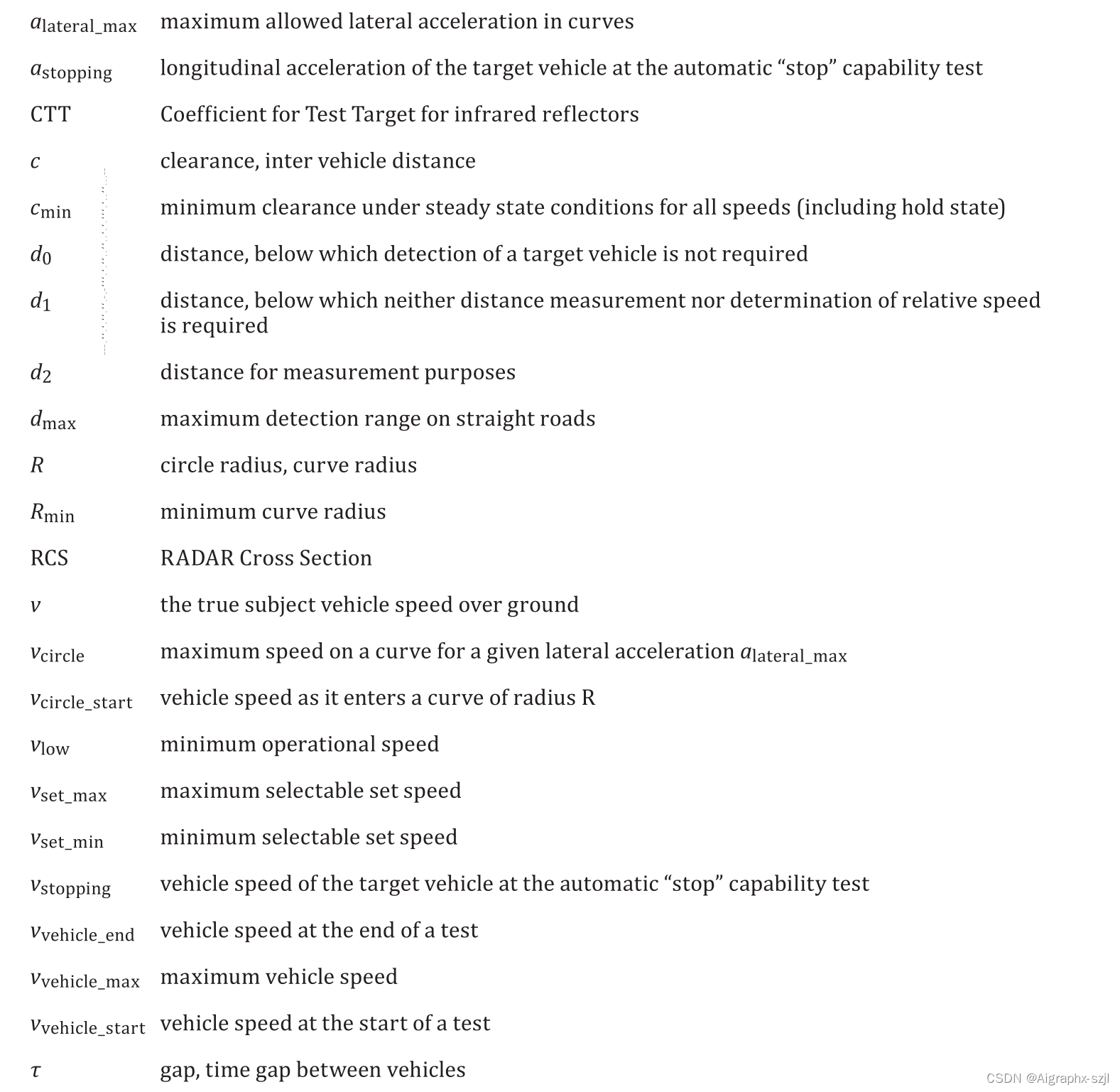
2.4 Symbols and abbreviated terms/符号和缩写词

2.5 Classification/分类
纵向控制的执行器的不同配置会有不同的系统行为。因此,根据两种不同的ACC类别,本文将讨论三种类型的ACC系统。

ACC系统的减速能力应在车主使用手册中明确说明。所有类型的车辆都有主动制动控制功能。在带离合器踏板的车辆(LSRA 1型)采用主动制动干预时,如果离合器不能自动脱开,应及早明确告知驾驶员制动和发动机怠速控制之间可能发生冲突。应为驾驶员提供一个切实可行且明确的接管流程。
2.6 Requirements/需求
2.6.1 Basic control strategy/基础控制策略
ACC系统至少应具备如下的控制策略和状态转换,以下是ACC系统的基本行为:
- 当ACC激活时,应自动控制车速,或保持与前车的间隙,或保持设定车速,以车速较低者为准。这两个控制节点之间的变化由ACC系统自动完成;
- 稳态跟车时距可以由系统自行调节,也可以由驾驶员调节;
- 如果有一个以上的前车,应自动选择被跟踪的车辆;
- 对于FSRA,在目标车辆停止后不超过3秒的时间内,从跟随控制状态转为保持状态;
- 对于FSRA,在 "保持 "状态下,应实现自动制动控制,使目标车辆保持静止;
- 对于LSRA型,如果主车车辆的车速低于最低运行速度Vlow,则从 "ACC stand-by "到 "ACC active "的过渡将被抑制;此外,如果系统处于 "ACC active "状态时车辆的车速低于Vlow,则自动加速将被抑制,ACC系统可能从ACC active 变到ACC stand by 状态。
备注:手动切换条件描述启用/关闭ACC功能的开关。发生故障时,系统可强制自动关闭开关。
2.6.2 Functionality/功能需求
2.6.2.1 Control modes/控制模式
控制模式(跟随控制或速度控制)之间应自动过渡。
2.6.2.2 Stationary or slow moving targets/静止或缓慢移动的目标
一般来说,并不要求ACC系统对静止或缓慢移动的目标作出反应。如果系统的设计不能对静止的目标作出反应,则至少应在车主使用手册中说明。FSRA,LSRA型系统可能会在其有限的减速能力范围内尝试在已经被跟踪和停止的目标车辆后停车。
2.6.2.3 Following capability/跟随能力
General/通用要求
- Tmin应是所有速度的稳态条件下跟随控制模式的最小可选择时隙v. Tmin应大于或等于0.8s;
- 速度高于8m/s时,跟车时距T至少应设置在1.5s~2.2s范围内;
- 在稳态条件下,最小间隙应为MAX(Cmin,Tmin*v);
- 在瞬时条件下,跟车时距可能暂时低于最小跟车时距。如果出现这种情况,系统应调整跟车间距,以达到理想的跟车间距;
- 适用于FSRA,LSRA,这些系统试图在停止的车辆后面停止。作为最低要求,该系统应能从稳态跟随开始,以低于Vstopping的速度在加速度astopping制动下逐渐停止的车辆后面停止;
- ACC应具有以下规定的探测范围、目标识别和曲线能力。
Detection range on straight roads/直线道路上的距离探测能力

如果在距离d1至dmax范围内有前车存在,ACC系统应测量前车与被测车辆之间的范围。在此范围内,前车应在至少为被探测车辆宽度的横向区域内被检测到。
dmax = Tmax(Vset_max)˟Vset_max
如果前方车辆出现在距离d0到d1的范围内,ACC系统应检测到该车辆的存在,既不需要测量到该车辆的距离,也不需要测量前方车辆和目标车辆之间的相对速度。
d1 = 4m。
如果前方车辆出现的距离小于d0,则不需要ACC系统来检测车辆的存在。
d0 = 2m。
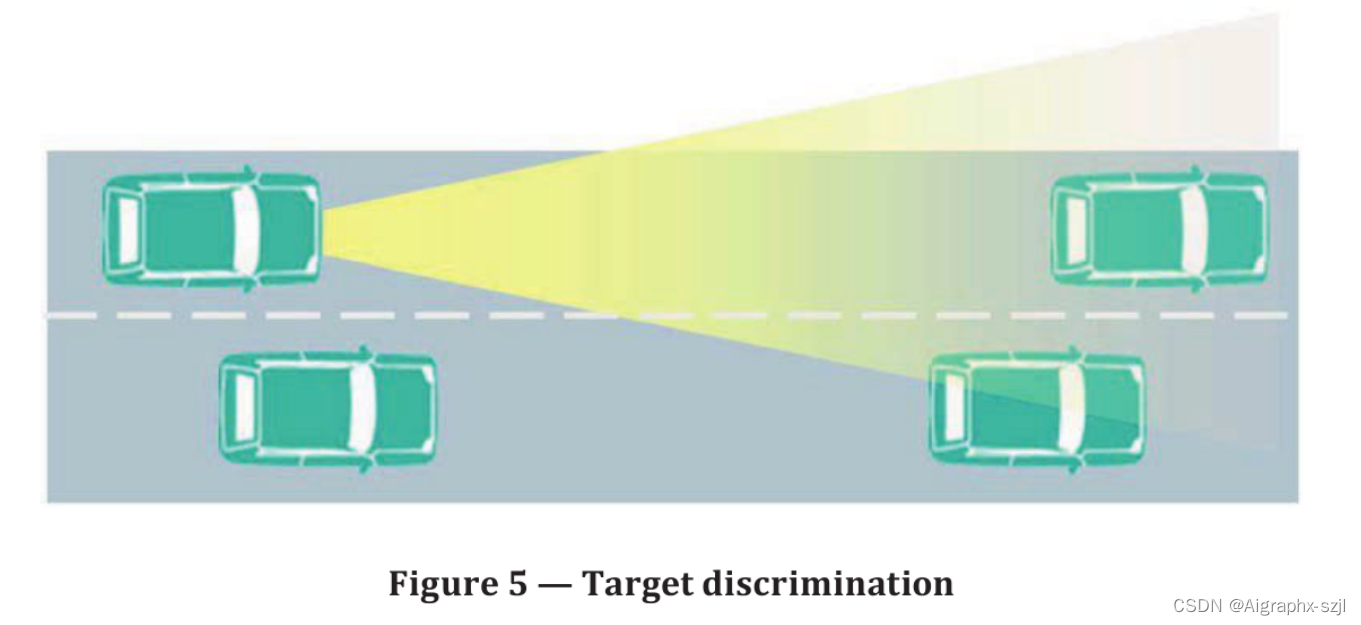
Target discrimination/目标区分能力
如果在直线道路上和稳态弯道上有多辆前车,则在测试场景所代表的典型ACC情况下,应选择本车车辆路径上的前车进行ACC控制。
Curve capability/曲线能力
ACC系统应使车辆能够以 Tmax (Vcircle) 的时间间隔在直线道路和半径小于 Rmin = 500m的弯道上稳态行驶。因此,如果前车在恒定的曲线半径Rmin上以恒定的速度Vcircle巡航,ACC系统应能以稳态跟车间距τmax( Vcircle)跟随前车,由以下公式给出:
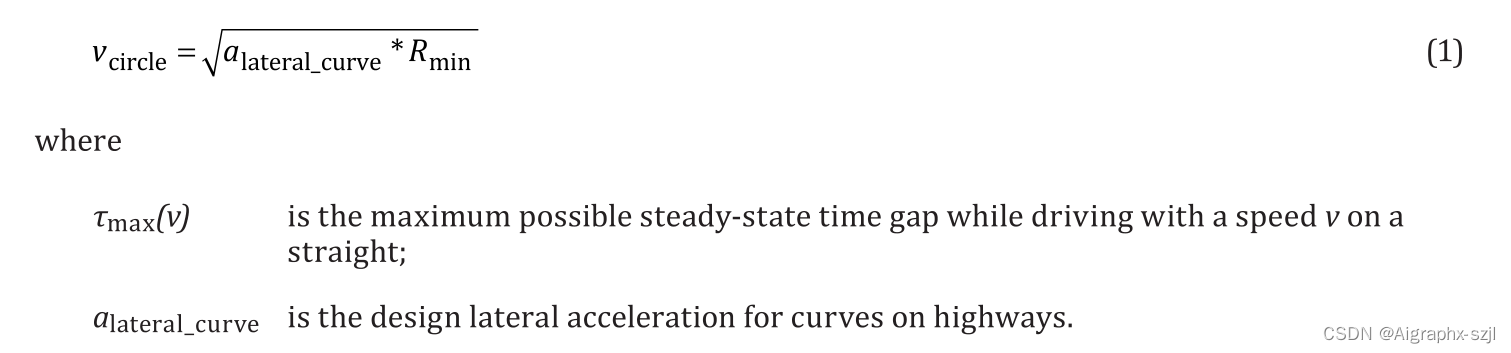
Tmax (v) 是指在直道上以v的速度行驶时可能出现的最大稳态跟车时距。
alateral_curve 为高速公路上弯道的设计侧向加速度。
alateral_curve的值来自于曲线中的平均司机行为(95%的司机)。
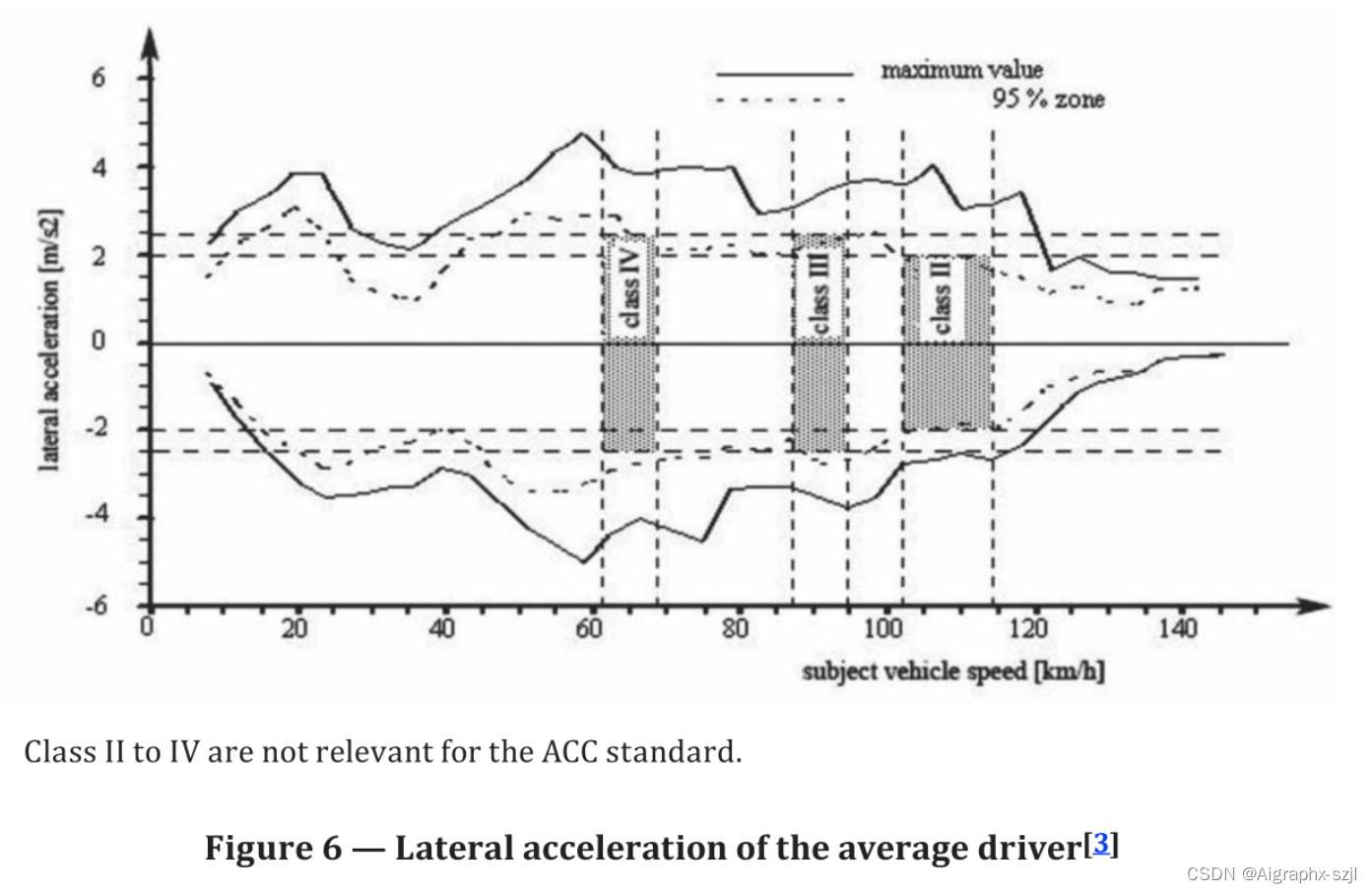
alateral,curve = 2.0 m/s^2,从而得出曲线行驶的稳态速度为Vcircle=114 km/h。
“Go” transition/转化条件
从保持到跟随控制或速度控制的过渡可以通过驾驶员请求或由ACC功能自动启用。
2.6.3 Basic driver interface and intervention capabilities/基本的驾驶员交互与干预能力
2.6.3.1 Operation elements and system reactions/操作要素和系统反应
- ACC系统应提供驾驶员选择所需设定速度的方式。可选地,可为驾驶员提供接受车载设备(如交通标志识别系统)建议的设定速度的手段;
- 在 "ACC跟随控制 "和 "ACC速度控制 "状态下,至少在驾驶员发起的制动力需求高于ACC发起的制动力时,驾驶员的制动应停用ACC功能。仅适用于FSRA型:在 "ACC保持 "状态下,驾驶员的制动不一定要退出ACC系统;
- 即使在ACC系统自动制动的情况下,ACC系统也不应导致对驾驶员制动输入的制动响应的显著瞬时降低;
- 来自驾驶员或ACC系统的较大动力需求将用于驱动发动机动力致动器(例如节气门执行器)。这始终赋予驾驶员超越ACC系统引擎动力控制的权限;
- 如果驾驶员的动力需求大于ACC系统的动力需求,则应立即释放制动力,解除自动制动。驾驶员对加速踏板的干预不应导致对驾驶员输入的响应有明显延迟;
- 自动制动的启动不得导致车轮锁定的时间超过防抱死装置(ABS)允许的时间;
- ACC的自动功率控制不应导致车轮过度滑动,且持续时间大于牵引力控制所允许的时间;
- ACC系统可根据驾驶环境(如恶劣天气)自动调整跟车时距,而无需驾驶员采取行动。但调整后的跟车时距不得小于驾驶员选择的最小跟车时距;
- 如果系统允许驾驶员选择所需的跟车时距,其选择方法应符合以下任一条件:①如果系统在切换到ACC off后保留了最后选择的跟车时距,则至少在系统启动时应将跟车时距清晰地呈现给驾驶员;②如果系统在切换到ACC off后没有保留最后选择的跟车时距,则应将跟车时距设置为等于1.5 s或更大的预定义默认值;
- 如果除ACC外还有常规巡航控制功能,则ACC和常规巡航控制之间不得自动切换;
- 可选:即使驾驶员踩下制动踏板,该系统也可在静止状态下由驾驶员启动;
- 仅适用于LSRA 1型。LSRA 1型系统应暂时中止运行,但仍处于ACC激活状态,或者在驾驶员踩下离合器踏板时切换到ACC待机状态。在使用离合器踏板期间,自动制动动作可以继续进行。在系统松开制动器后,系统可以恢复ACC控制,也可以在驾驶员踩下离合器踏板的情况下过渡到ACC待机状态。
2.6.3.2 Display elements/显示要素
- 驾驶员的最小反馈信息包含激活状态(ACC系统是否激活)和设定速度;
- 如果ACC系统因故障而无法使用,则应通知驾驶员。 如果使用符号通知驾驶员,则应使用标准符号,参见ISO 2575;
- 如果ACC系统自动停用,则应通知驾驶员。如果使用符号通知驾驶员,则应使用标准符号;
- 如果车辆同时配备了ACC和传统的巡航控制系统,则应让驾驶员知道是哪个系统在工作;
- 车辆探测信号,意味着主动式ACC系统正在检测前方车辆,如果该前方车辆被用于适应控制,则需要激活该信号。
2.6.3.3 Symbols/符号
如果使用符号来识别ACC的功能或故障,应使用符合ISO 2575的标准符号。
2.6.4 Operational limits/操纵限制
为了提高舒适性,在5m/s以下,不得因目标车辆消失而突然释放制动力,也不得因制动故障以外的系统故障而自动失效。
仅适用于LSRA型。ACC的自动正向加速要求车速Vlow至少为5m/s。
最小设定速度应为Vset_min>=4.4 m/s。
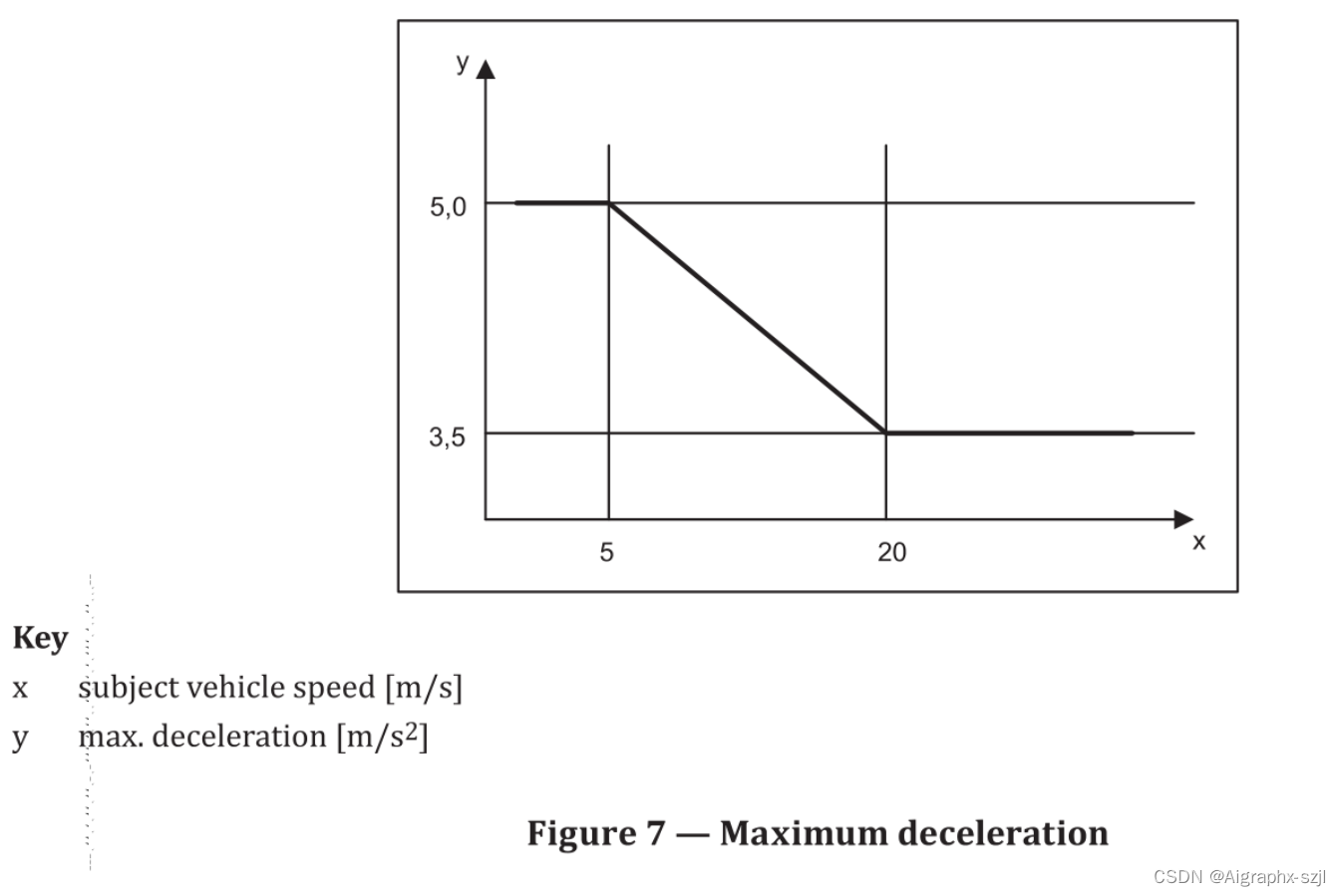
如图7所示,当车辆行驶速度高于20m/s时,ACC系统的平均自动减速不得超过3.5m/s^2(平均2s以上),当车辆行驶速度低于5m/s时,自动减速不得超过5m/s^2(平均2s以上)。
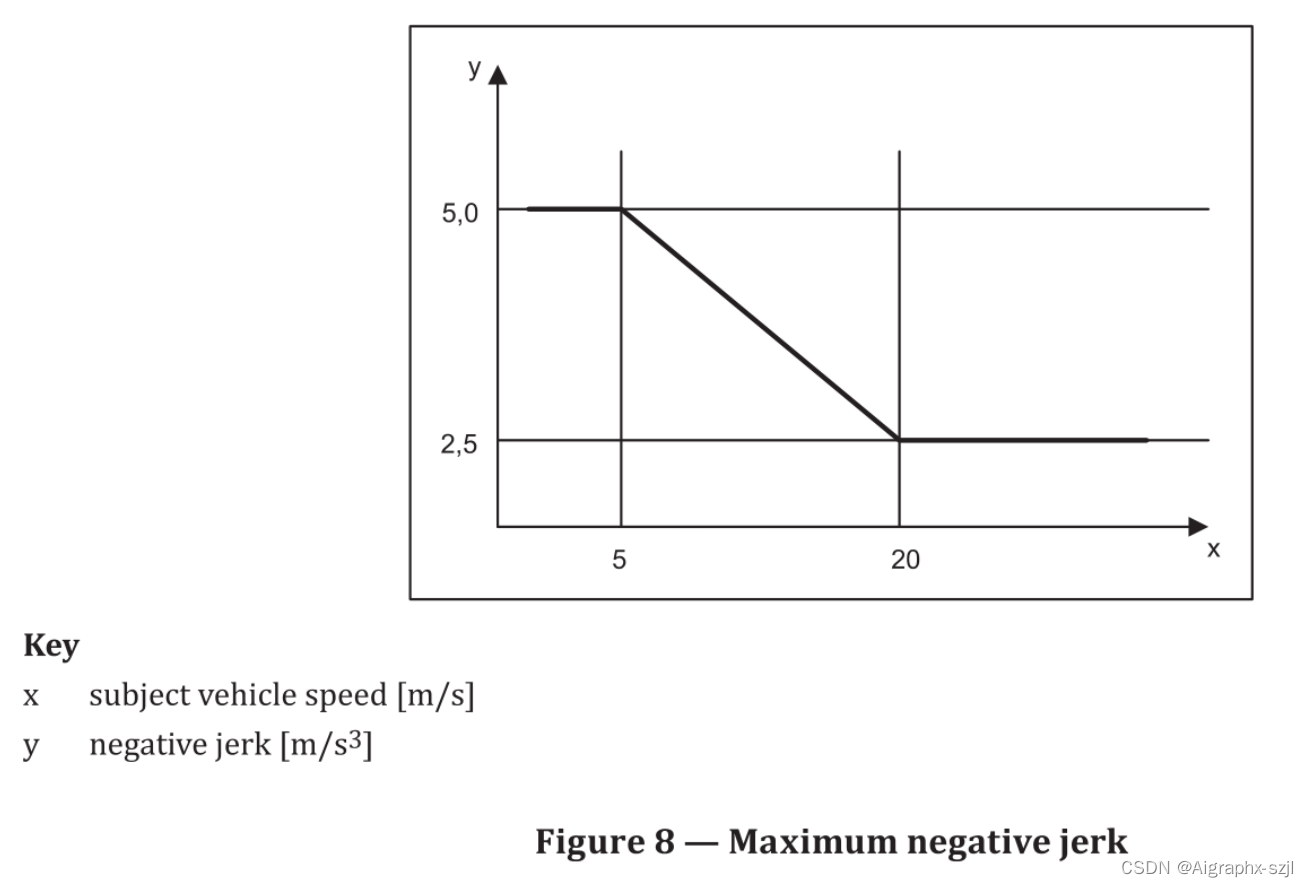
如图8所示,当车辆行驶速度高于20m/s时,自动减速的平均变化率(负抖动)不得超过2.5m/s^3(平均1s),当车辆行驶速度低于5m/s时,自动减速的平均变化率不得超过5m/s^3(平均1s)。
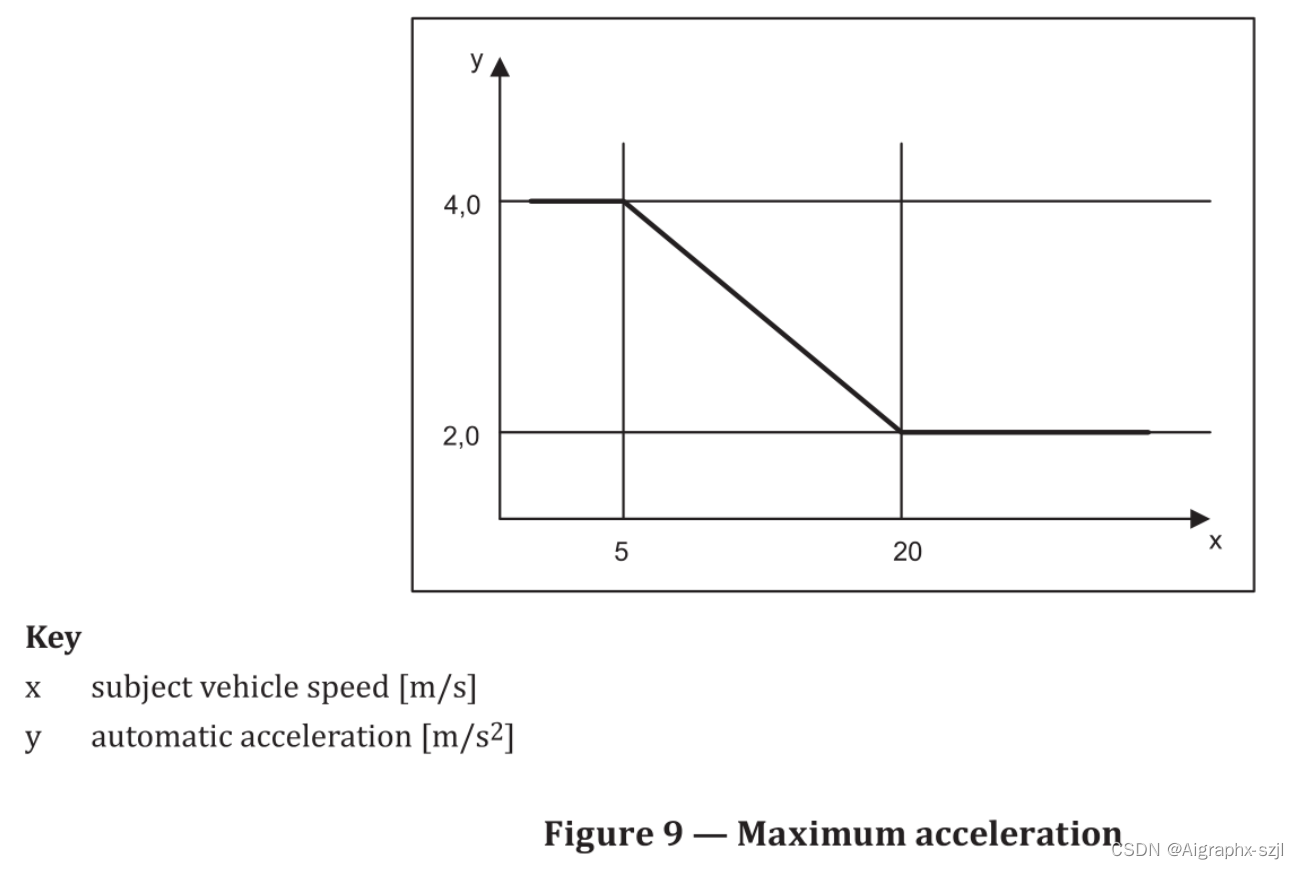
如图9所示,当车辆行驶速度超过20m/s时,ACC系统的平均自动加速度不应超过2m/s^2(平均超过2s),当车辆行驶速度低于5m/s时,自动加速度不应超过4m/s^2(平均超过2s)。
如果目标车辆靠近到d0以上,且不再检测到目标车辆,系统应从最后一条有效制动指令开始启动控制器策略,直到目标车辆停止或系统检测到d1以内的前车或驾驶员通过加速踏板抑制系统。如果在d0~d1的距离范围内检测到前方车辆,且距离无法确定,系统应抑制自动加速。
2.6.5 Activation of brake lights/制动灯的启动
如果启用自动行车制动,则制动灯应点亮。当ACC系统应用其他减速装置时,系统可点亮制动灯。刹车灯应在ACC系统启动工况制动后350ms内点亮。为了防止刺激性的制动灯闪烁,在ACC启动制动后,制动灯可以保持合理的时间内亮起。
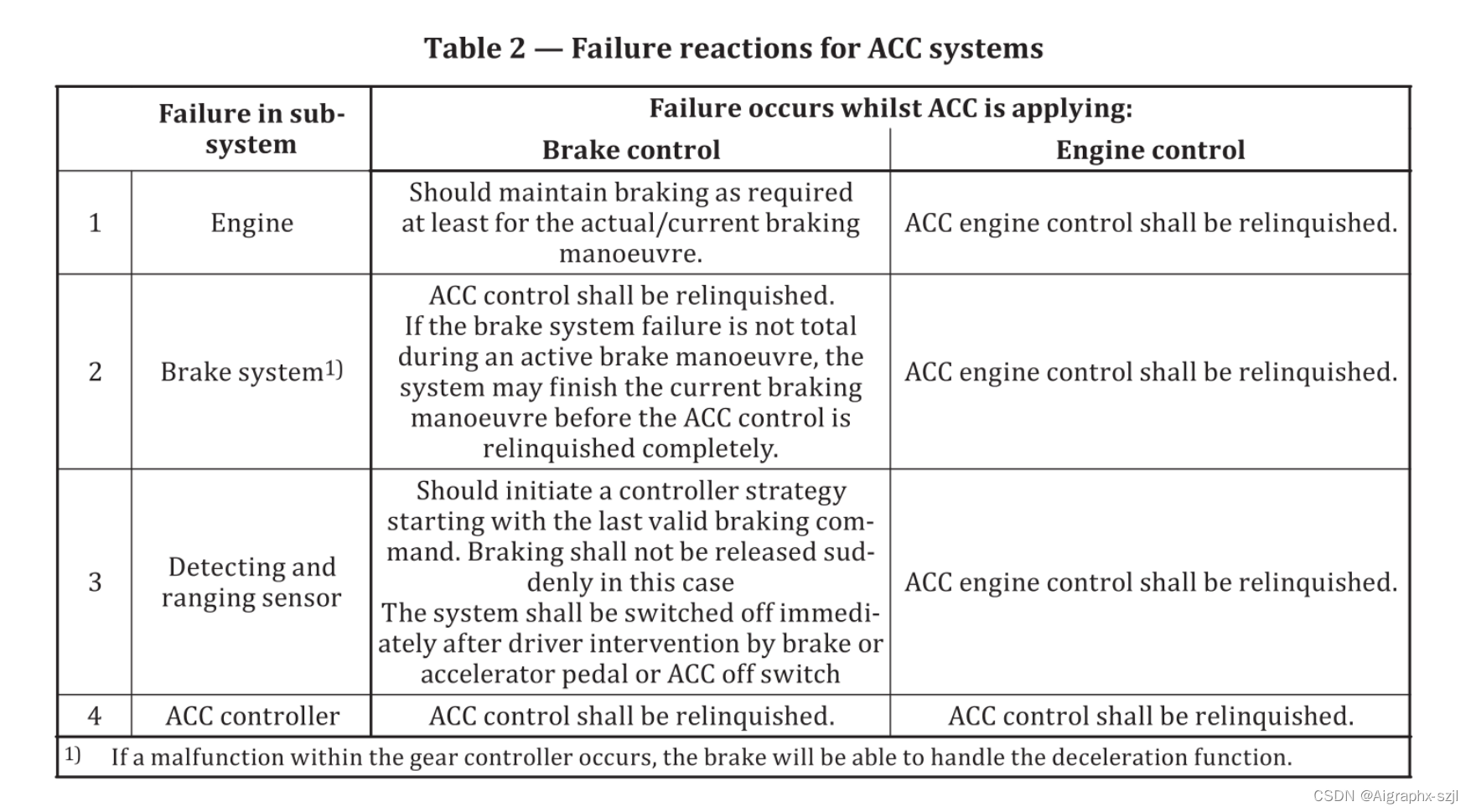
2.6.6 Failure reactions/失效响应
- 下述的故障应立即通知驾驶员(LSRA 1型系统的变速箱故障除外),在系统关闭之前,该通知应保持有效;
- 在点火关闭/开启或ACC关闭/开启的自检成功之前,应禁止重新启动ACC系统。
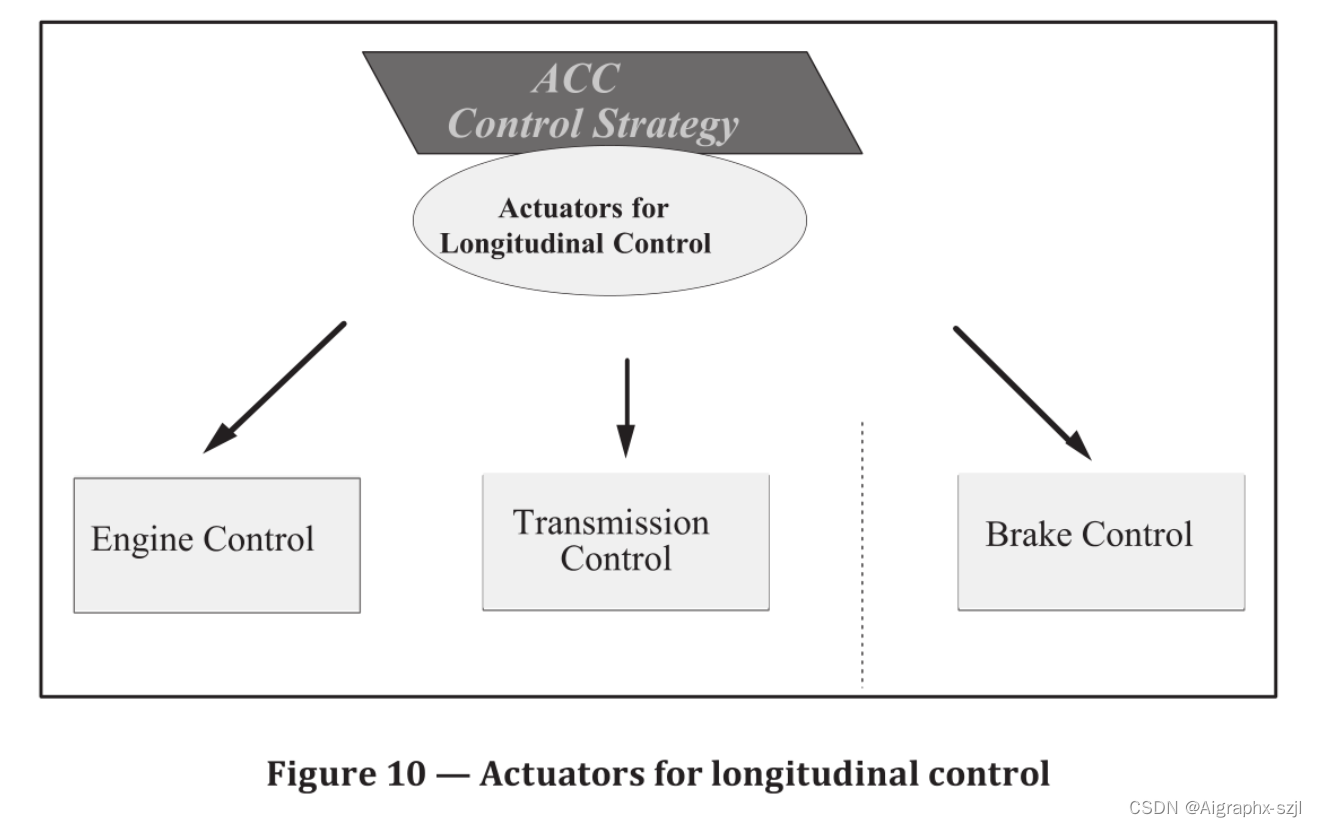
表2所述的故障应立即通知驾驶员(LSRA 1型系统的变速箱故障除外)。在系统关闭之前,该通知应保持有效。
2.7 Performance evaluation test methods/性能评估测试方法
2.7.1 Environmental conditions/环境条件
- 试验位置应在平坦、干燥的沥青或混凝土表面;
- 温度范围应在-20℃和+40℃之间;
- 温度范围应在-20°C和+40°C之间,水平能见度范围应大于1 km。
2.7.2 Test target specification/测试目标规范
2.7.2.1 General/总则
测试目标是为目前使用的技术制定的,对于其他技术,则进行代表性试验。
2.7.2.2 Infrared LIDAR/激光雷达
红外测试目标由测试目标CTT的红外系数和测试目标的横截面定义。测试目标A和B的最小横截面为 20cm^2 。
• 试验目标A:漫反射 CTT=2.0m^2/sr±10%
• 试验目标A:漫反射 CTT=1.0m^2/sr±10% ;
2.7.2.3 Millimetre wave RADAR/毫米波雷达
雷达测试目标由雷达散射截面(RCS)定义。
对于20 GHz到95 GHz的频率范围:
• 试验目标A:试验目标A的RCS应为10m^2 ;
• 试验目标B:试验目标A的RCS应为3m^2 ;
对于显著不同的频率范围,应确定和定义RCS。
2.7.3 Automatic "Stop" Capability test for FSA-type only/自动“停止”能力测试仅适用于FSRA型
停止”能力测试应确保FSRA系统在较低速度范围内的功能下降至停止状态。
2.7.3.1 Test target vehicle/试验目标车辆
目标车辆应配备7.2中规定的试验目标A。试验目标车应放在车辆后端。车辆的其余部分以这样的方式隐藏:去除试验目标后,后表面的RCS不大于2m^2或反射率不大于试验目标的20%。
2.7.3.2 Initial conditions/初始条件
• 目标车辆应以Vstop的速度行驶;
• 目标车辆的宽度应在1.4m和2.0m之间;
• 目标车辆以稳态跟踪控制模式在目标车辆后面巡航;
• 在整个试验过程中,所需的跟车时距应为Tmin值;
目标车辆纵向中心线相对于前车辆纵向中心线的横向位移应小于0.5m,如图11。
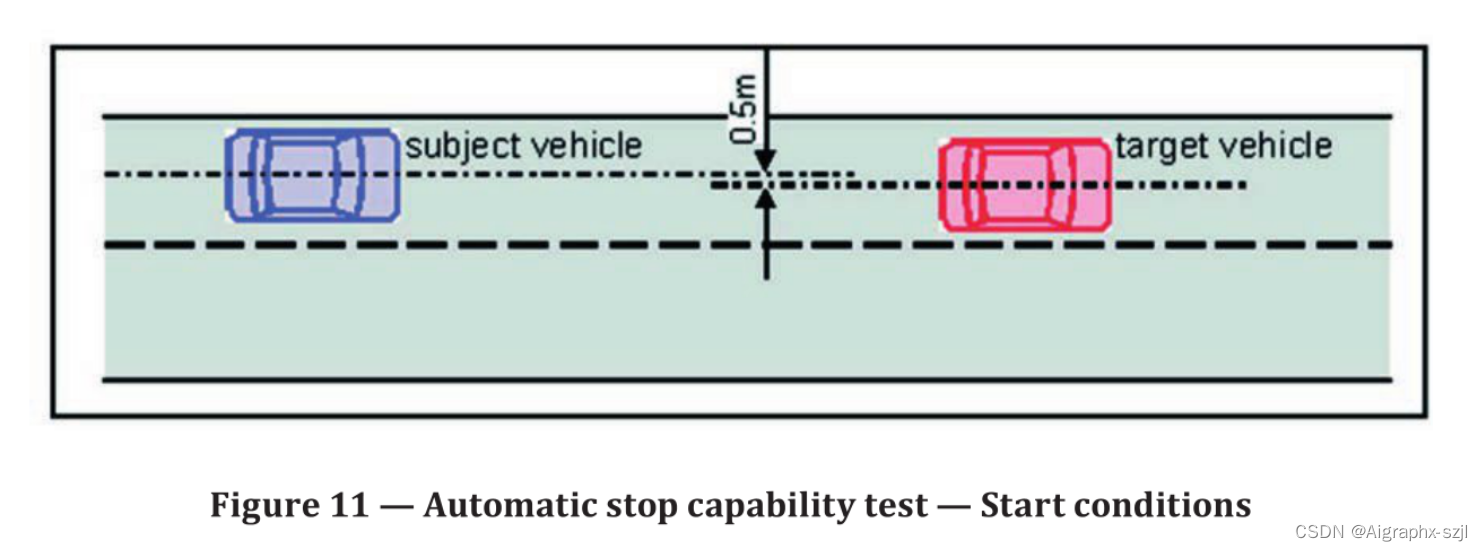
2.7.3.3 Test procedure/试验过程
目标车辆应以-2.0 m/s^2 至-2.5 m/s^2 之间的加速度减速至停车。
当测试车辆通过该系统停止在前车后部时,试验被视为成功完成。
2.7.4 Target acquisition range test/目标探测距离测试
车辆参考平面以从高度0.2m开始的主体车辆宽度对应于高度为0.9m的矩形。检测区域考虑车辆前端平面内的不同位置。它也受到乘用车最低高度的限制。d1,d2,dmax的参考平面分为3列,列 L和 R 的宽度是50cm。在测试过程中,应在车辆参考平面的每一列(L、C、R) 中 d1,d2,dmax至少一个位置放置反射器。
在d0,在整个参考平面内只有一个位置必须被检测,如图12。
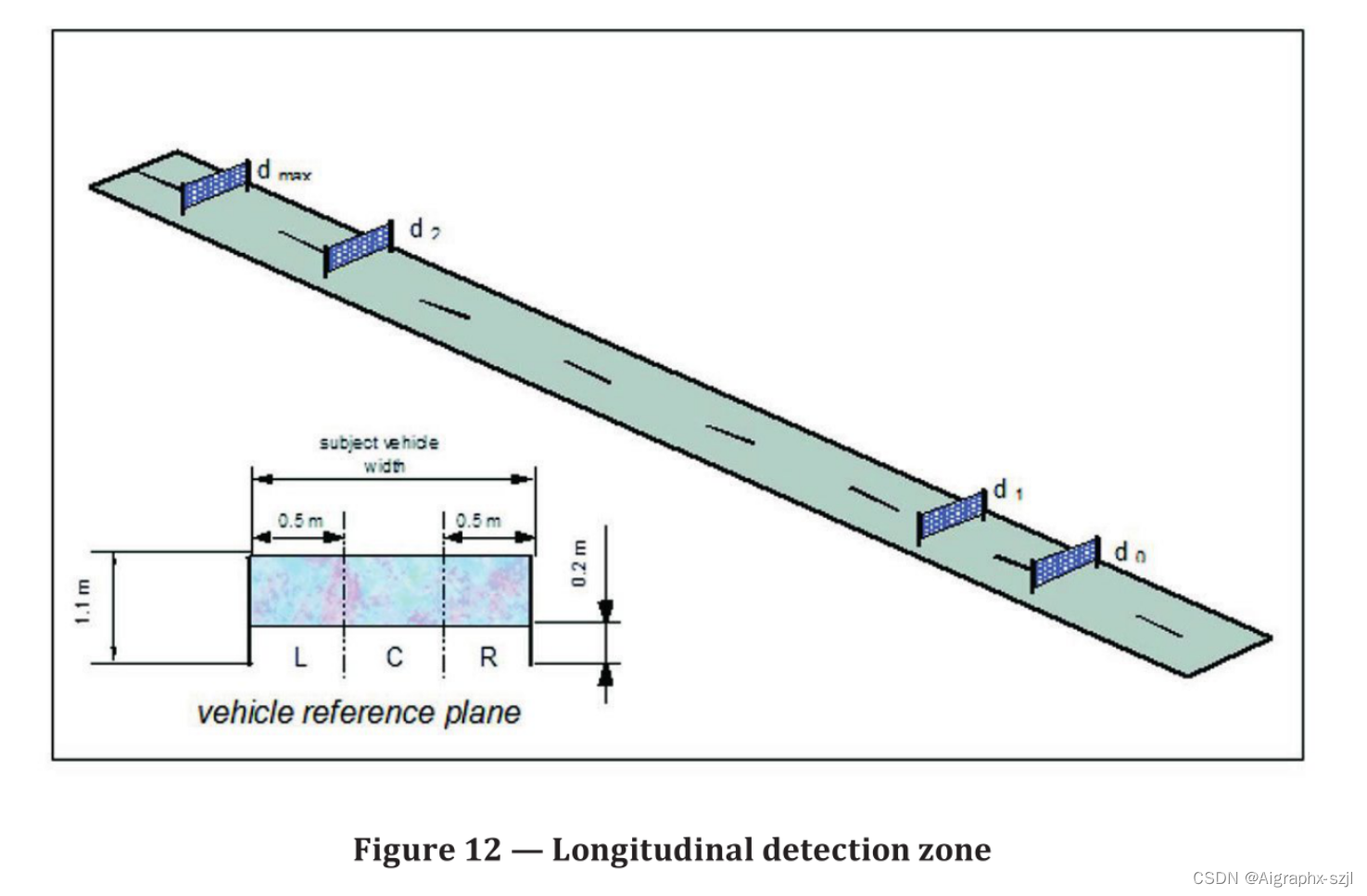
• 对于 dmax位置,应使用测试目标A;
• 对于 d0,d1,d2位置,应使用测试目标B;
• d2点是指车辆前方75m处的一个固定测量点;
• 距离测试应在自车和目标车移动时进行,作为备选项,允许在试验车辆和目标在静止的情况下进行试验。
目标出现后的最大目标探测时间不得超过2s。
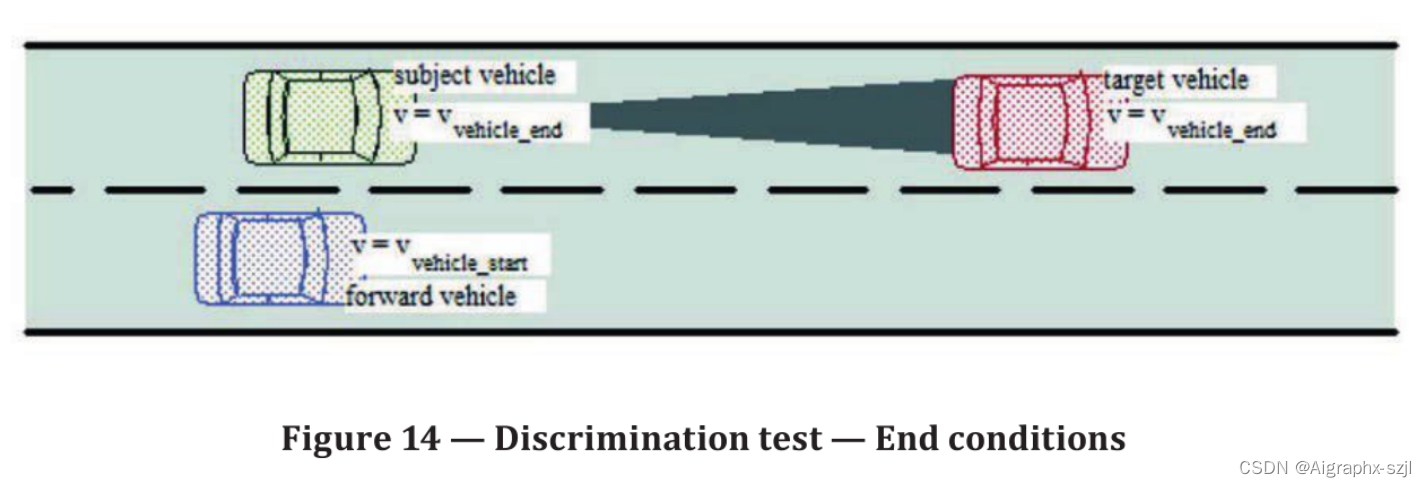
2.7.5 Target discrimination test/目标识别测试
2.7.5.1 General/总则
略
2.7.5.2 Initial Conditions/初始条件
• 同一型号的两辆前车以 Vvehicle_start的速度并排行驶。两前车的纵向中心线之间的间距为 3.5m±0.25m 。前车的宽度应在1.4m和2.0m之间。测试车辆以稳态跟随控制模式在其中一辆前车后面巡航,测试车辆跟随的前车被指定为目标车辆。跟车时距为 Tmax(Vvehicle_start),设置速度为 Vvehicle_end。自车纵向中心线相对于目标车辆纵向中心线的横向位移应小于0.5m。
Vvehicle_end=27m/s(~100km/h)
注意:如果车辆不能达到此速度,则设置 Vvehicle_end=22m/s(~80km/h)。
Vvehicle_start=Vvehicle_end−3m/s
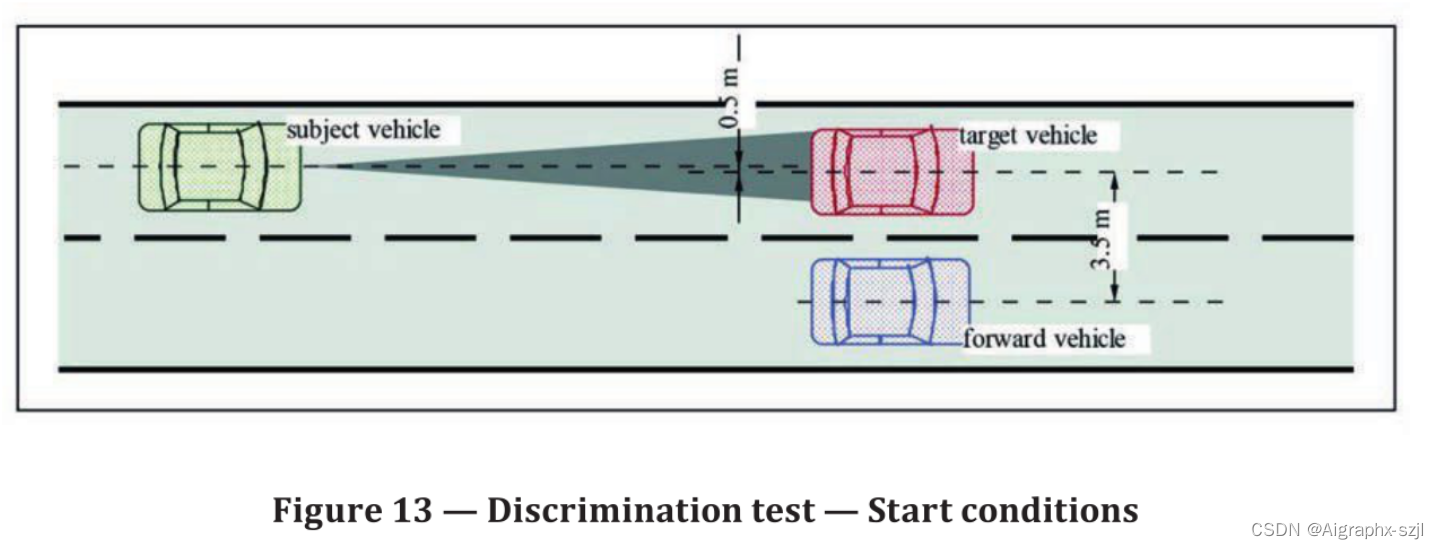
2.7.5.3 Test procedure/测试过程
目标车加速至 Vvehicle_end ,如果自车在ACC的控制下超越相邻车道上的前车,则试验成功完成。
2.7.6 Curve Capability Test/曲线能力测试
2.7.6.1 General/总则
这项测试应该结合ACC系统传感器的视场来考虑道路的几何形状。
不同的道路几何形状和车头时距的感知方法导致了对驾驶场景的需求。
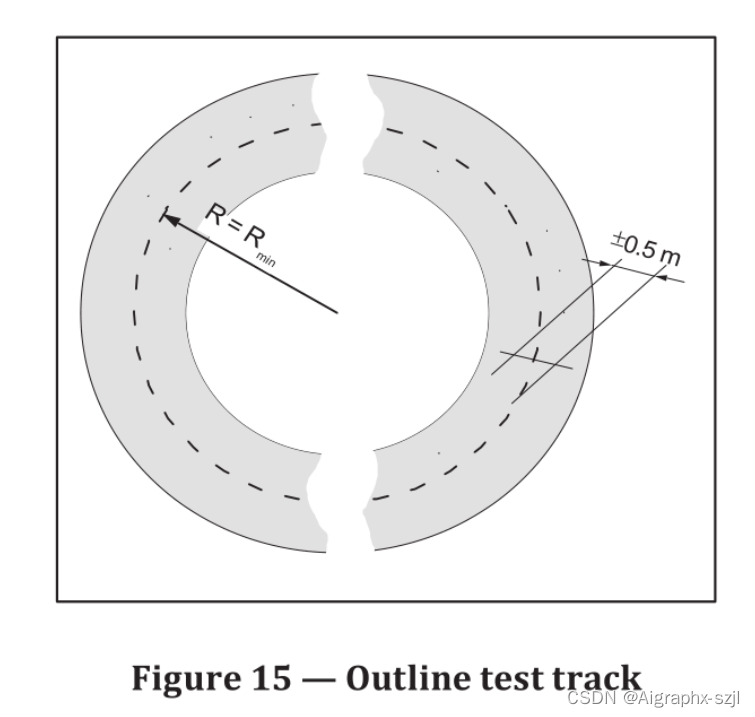
2.7.6.2 Test Field/测试场地
试验轨道应包括恒定半径的圆形轨道或足够长的恒定半径曲线段。半径应在 Rmin=500m 的80%至100%范围内。轨道上的行驶方向应为顺时针和逆时针,车道上没有护栏等。
2.7.6.3 Curve capability, target vehicle/曲线能力、目标车
目标车辆应配备7.2中规定的试验目标A。试验目标应位于车辆后端的中间,高度为0.6m±0.1m。车辆的其余表面应以这样的方式隐藏:试验目标后表面的RCS不大于2m^2 或反射率不大于试验目标的20%。
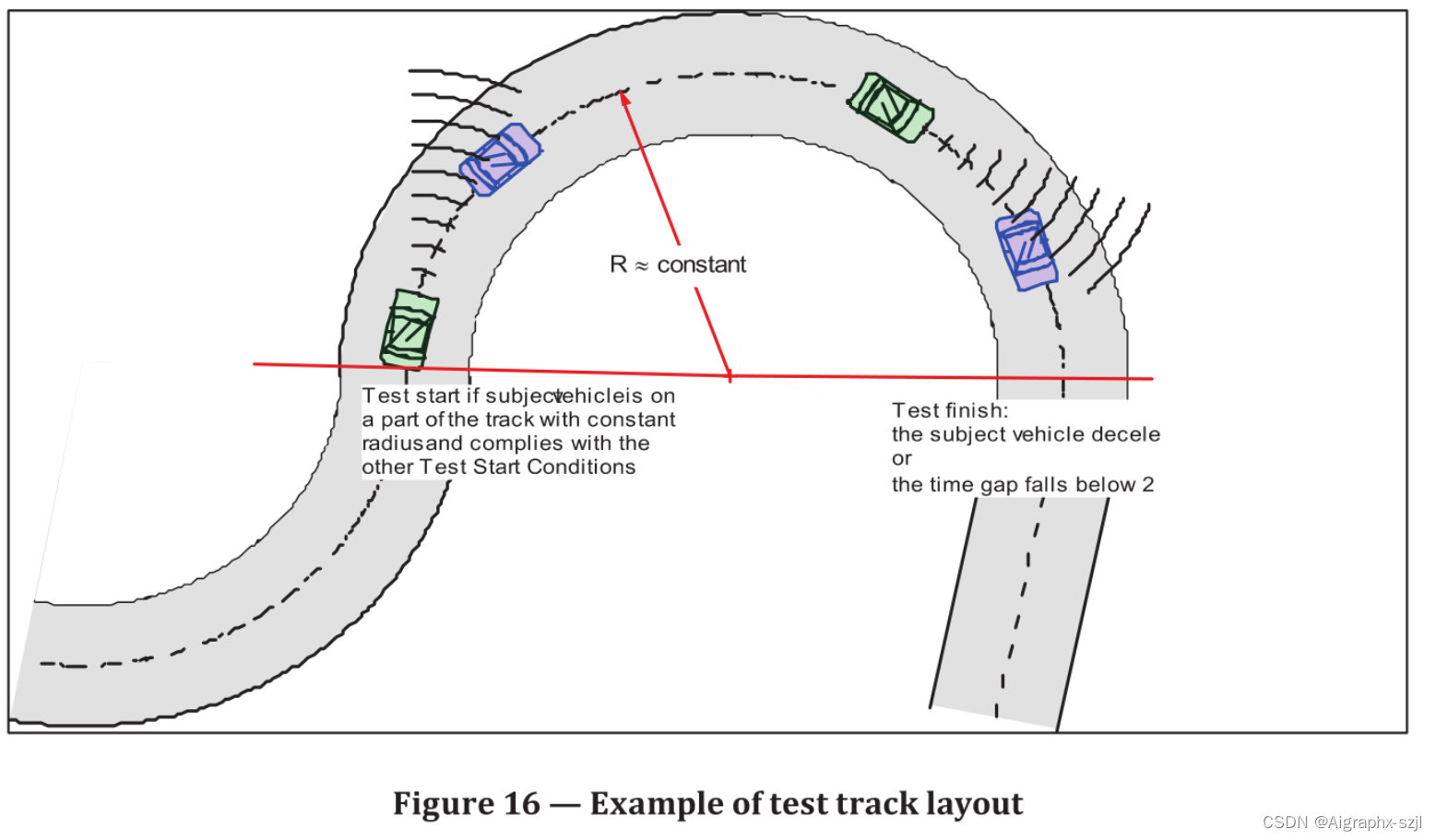
2.7.6.4 Driving scenario/驾驶情景
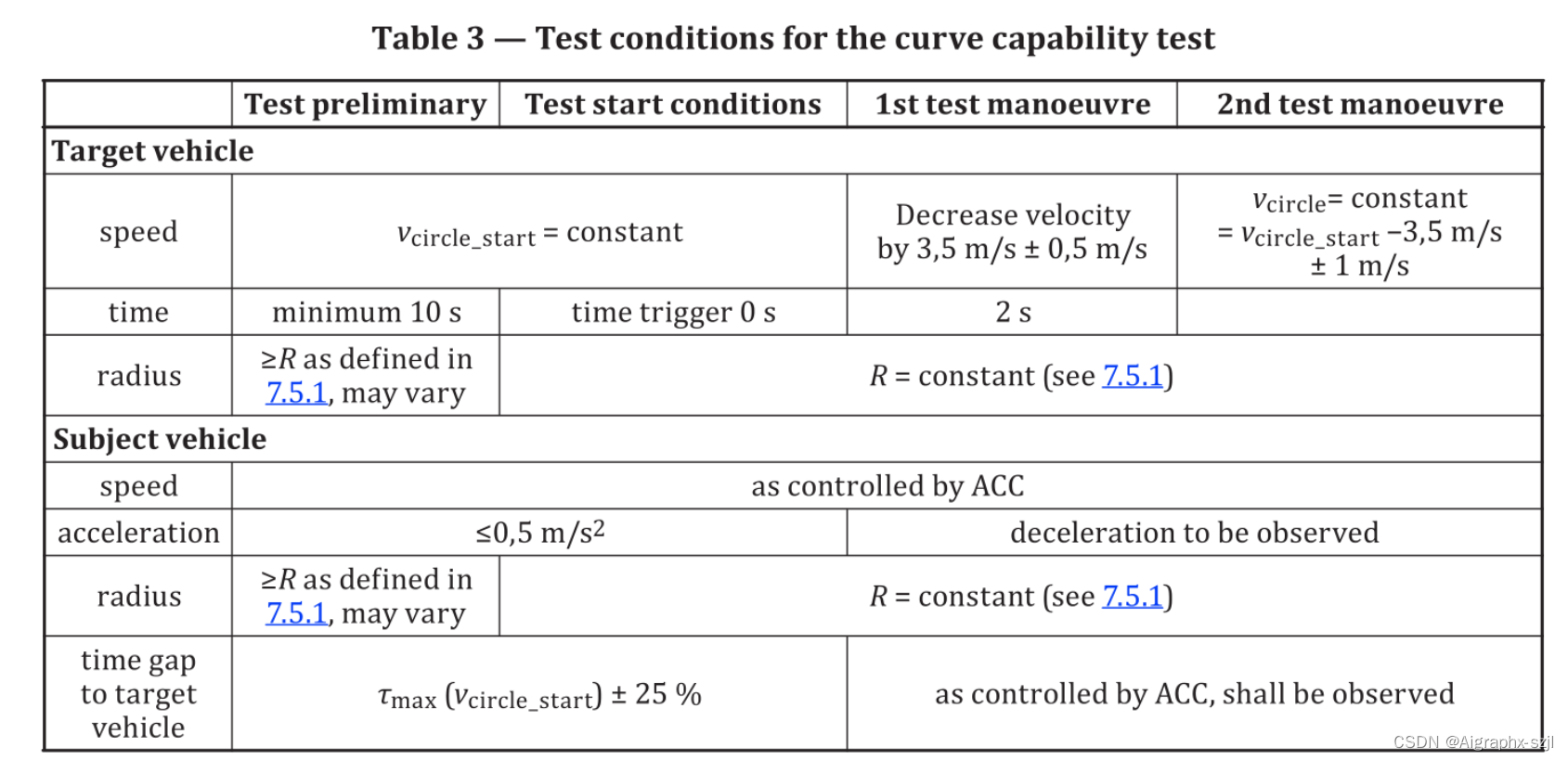
在跟驰控制模式下,自车沿着相同的路径(从两辆车的中心线测量的0.5m横向间隔)跟驰目标车辆。试验开始前,两辆车应符合规定的试验开始条件。在试验开始前,这两辆车应符合图16中规定的试验开始条件(仅限于试验对象和目标车辆)。详细情况如表3和图16所示。
试验开始时目标车辆的速度由下式给出:
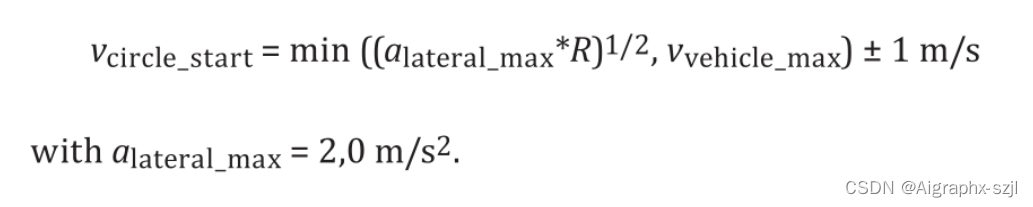
在适当的时间,目标车辆减速,并且观察目标车辆的反作用。在时间间隔低于2/3Tmax之前,主体车辆应由于与目标车辆的距离减小而开始减速。
备注:ACC测试用例及详细测试将在本专题最后章节另起一节专门介绍。


















 3102
3102

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











