







本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
1. Introduction/简介
1.1 ISO15622 Introduction
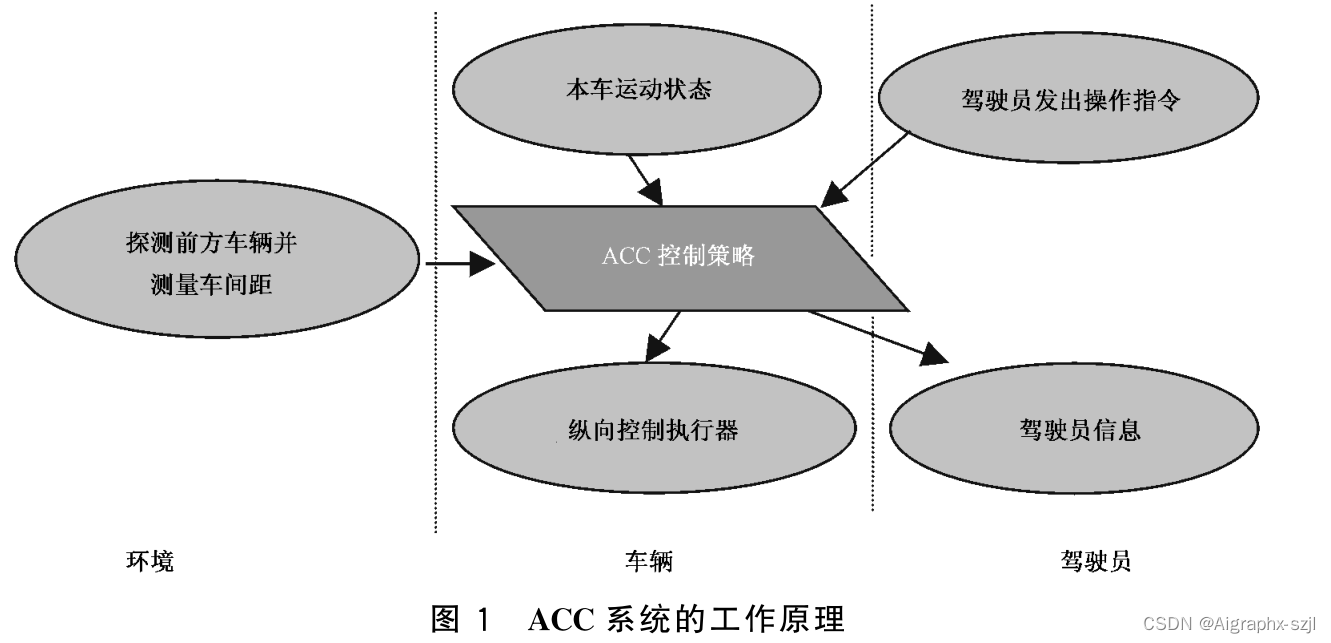
The main system function of Adaptive Cruise Control (ACC) is to control vehicle speed adaptively to a forward vehicle by using information about: (1) distance to forward vehicles, (2) the motion of the subject (ACC equipped) vehicle and (3) driver commands (see Figure 1). Based upon the information acquired, the controller (identified as "ACC control strategy" in Figure 1) sends commands to actuators for carrying out its longitudinal control strategy and it also sends status information to the driver. Optionally, the driver may choose to have the ACC use set speed advice from in-vehicle devices. 自适应巡航控制系统(ACC)的主要系统功能是利用以下信息自适应地控制车速,以适应前方车辆:(1)到前方车辆的距离,(2)本车(配备ACC的)车辆的运动,以及(3)驾驶员操作指令(见图1)。基于所获取的信息,控制器(在图1中标识为“ACC控制策略”)向执行其纵向控制策略的制动器发送命令,并向驾驶员发送状态信息。可选地,驾驶员可以选择让ACC使用来自车载设备的设置速度建议。

The goal of ACC is a partial automation of the longitudinal vehicle control and the reduction of the workload of the driver with the aim of supporting and relieving the driver in a convenient manner. The generic ACC system comprehends two classes: Full Speed Range ACC (FSRA) and Limited Speed Range ACC (LSRA). ACC的目标是实现车辆纵向控制部分自动化,减少驾驶员的工作量,目的是为驾驶员提供方便的支持。通用的ACC系统包含两类:全速范围ACC(FSRA)和限速范围ACC(LSRA)。
This document can be used as a system level standard by other standards, which extend the ACC to a more detailed standard, e.g. for specific detection and ranging sensor concepts or higher level of functionality. Therefore, issues like specific requirements for the detection and ranging sensor function and performance or communication links for co-operative solutions will not be considered here. 本文档可被其他标准用作系统级标准,这些标准将ACC扩展为更详细的标准。例如,用于特定的探测和测距传感器概念或更高级别的功能。因此,这里将不考虑对探测和测距传感器功能和性能的具体要求,或合作解决方案的通信链路等问题。
1.2 GB/T 20608 前言
自适应巡航控制(ACC)系统的主要功能是基于特定的信息控制车速与前方车辆运动状态相适应,这些信息包括:(1)与前车间的距离;(2)本车的运动状态;(3)驾驶员的操作指令,如图1。基于上述信息,控制器(图1中称为的“ACC控制策略”)发送控制指令执行纵向控制,同时将状态信息提供给驾驶员。
ACC的目的是通过对车辆纵向运动进行自动控制,以减轻驾驶员的疲劳强度,保证行车安全,并通过方便的方式为驾驶员提供辅助支持
本标准可被其它标准作为基本标准采用,例如,有关探测传感器及其扩展功能等,这将有助于使ACC相关标准更加详尽。因此,用于协调合作解决方案的探测传感器功能、性能及通讯方面的特殊要求将不在本标准的讨论之列。
2. Scope/范围
2.1 ISO15622 Scope
This document contains the basic control strategy, minimum functionality requirements, basic driver interface elements, minimum requirements for diagnostics and reaction to failure, and performance test procedures for Adaptive Cruise Control (ACC) systems. 本文档包含自适应巡航控制(ACC)系统的基本控制策略、最低功能要求、与驾驶员交互的基本信息、故障诊断和失效反应的最低要求以及性能测试程序。
ACC systems are realised as either Eull Speed Range Adaptive Cruise Control (FSRA) systems or .Limited Speed Range Adaptive Cruise Control (LSRA) systems. LSRA systems are further distinguished into two types, requiring manual or automatic clutch. Adaptive Cruise Control is fundamentally intended to provide longitudinal control of equipped vehicles while travelling on highways (roads where nonmotorized vehicles and pedestrians are prohibited) under free-flowing and for FSRA-type systems also for congested traffic conditions. ACC can be augmented with other capabilities, such as forward obstacle warning. For FSRA-type systems,the system will attempt to stop behind an already tracked vehicle within its limited deceleration capabilities and will be able to start again after the driver has input a request to the system to resume the journey from standstill. The system is not required to react to stationary or slow moving objects. 自适应巡航控制系统(ACC)可分为全速(FSRA)和限速(LSRA)两种。其中限速LSRA又分为两类,即车辆配置手动或自动离合器。自适应巡航控制的基本目的是在高速公路(禁止非机动车和行人通行的道路)上自由行驶时,为本车提供纵向控制。对于FSRA类型的系统也适用于拥堵的交通状况。ACC还可以扩展到其他功能,如前方障碍物警告。对于FSRA类型的系统,系统能试图在其有限的减速能力范围内停在目标车辆后面,并在驾驶员向系统输入从静止状态恢复行驶的请求后能够再次启动。系统不需要对静止或缓慢移动的物体作出反应。
2.2 GB/T 20608 范围
本标准规定了自适应巡航控制(以下简称 ACC)系统的基本控制策略、最低的功能要求、基本的人机交互界面、故障诊断及处理的最低要求以及性能检测规程。
本标准适用于 ACC系统的性能检测。
3. Classification/分类
3.1 ISO15622 Type of ACC systems
Different configurations of actuators for longitudinal cont rol result in very different system behaviour. Therefore, based on the two different ACC classes, three types of ACC systems are addressed in this document. 执行纵向控制的不同配置执行器会有不同的系统行为。因此,根据FSRA、LSRA两种不同的ACC,本文将讨论三种类型的ACC系统。

The deceleration capability of the ACC system shall be clearly stated in the vehicle owner's manual. All types incorporate active brake control. In case of active brake intervention in vehicles with a clutch pedal (type LSRA 1) the driver shall be informed clearly and early about a potential conflict between brake and engine idle control, if the clutch cannot be disengaged automatically. A practicable and unambiguous handing-over procedure shall be provided for the driver. ACC系统的减速能力应在车主使用手册中明确说明。所有类型的车辆集成了主动制动控
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2205
2205











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











