






测试环境: Ubuntu22.04
测试平台: ROS2 humble
在ros2中可以调用的状态转换主要有以下五种:
-
配置(configure)
-
激活(activate)
-
停用(deactivate)
-
清理(cleanup)
-
关闭(shutdown)
其中状态的转移可以通过以下五个函数进行:
-
on_configure():当节点从未配置状态转换到非激活状态时,此函数会被调用。 -
on_activate():当节点从非激活状态转换到激活状态时,此函数会被调用。 -
on_deactivate():当节点从激活状态转换到非激活状态时,此函数会被调用。 -
on_cleanup():当节点从非激活状态转换到未配置状态时,此函数会被调用。 -
on_shutdown():当节点从任何状态转换到关闭状态时,此函数会被调用。
下面演示这五个函数的具体用法以及转台转移过程。
1.在home下创建工作空间
mkdir lifecyclenode/
cd lifecyclenode/
mkdir src/
colcon build
2.在/src下创建功能包
cd src/
ros2 pkg create life --build-type ament_cmake --dependencies rclcpp std_msgs rclcpp_lifecycle --node-name test01
3.修改test01中的代码如下:
#include "rclcpp_lifecycle/lifecycle_node.hpp"
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
class LifecycleNode:public rclcpp_lifecycle::LifecycleNode
{
public:
LifecycleNode():rclcpp_lifecycle::LifecycleNode("lifecycle_node")
{
}
//当节点从未配置状态转换到非激活状态时调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_configure(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Configuring...");
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
//当节点从非激活状态转换到激活状态时会调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_activate(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Activating...");
publisher_->on_activate();
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
//当节点从激活状态转换到非激活状态时会调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_deactivate(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Deactivating...");
publisher_->on_deactivate();
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
//当节点从非激活状态转换到未配置状态时调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_cleanup(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Cleanup...");
publisher_.reset();
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
//当节点从任何状态转换到关闭状态时调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_shutdown(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Shutdown!");
//进行关闭的具体
rclcpp::shutdown();
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
//执行出现错误时调用下面的函数
rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn on_error(const rclcpp_lifecycle::State & )
{
RCLCPP_INFO(this->get_logger(), "Error!");
//进行具体的错误处理
return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;
}
private:
rclcpp_lifecycle::LifecyclePublisher<std_msgs::msg::String>::SharedPtr publisher_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<LifecycleNode>();
rclcpp::spin(node->get_node_base_interface());
rclcpp::shutdown();
return 0;
}
上面的代码的节点在创建时会自动进入unconfigured状态。可以通过在命令行界面输入指令来控制其状态的转换。每个状态转换都会触发相应的回调函数。
4.通过命令行切换其状态
首先在lifecyclenode目录下编译功能包
colcon build --packages-select life
接着执行文件
. install/setup.bash
ros2 run life test01
执行后会看到什么消息都没有,因为并没有发生状态转移,也就不会有输出,接下来就需要打开一个新的终端,在命令行中输入:
ros2 lifecycle set /lifecycle_node configure
这可以将节点从unconfigured转移至configure状态,同时可以看到文件执行下的输出:

接下来输入,将节点从configure转移至activate状态:
ros2 lifecycle set /lifecycle_node activate
同时获得以下输出:

输入:
ros2 lifecycle set /lifecycle_node deactivate
将节点从activate转移至deactivate状态,获得以下输出:

接着测试cleanup状态,转回到unconfigured状态:
ros2 lifecycle set /lifecycle_node cleanup

最后执行shutdown,看看是否能正常关闭:
ros2 lifecycle set /lifecycle_node shutdown
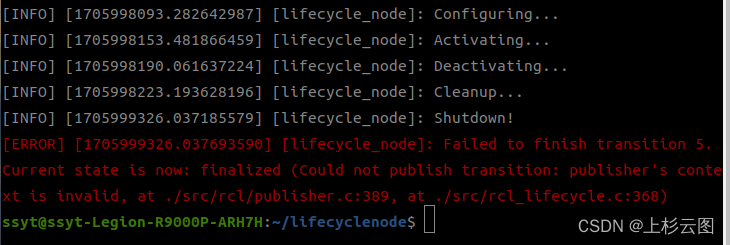
可以看到虽然有错误,但确实可以关闭节点。















 1506
1506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









