







 本文深入解析YOLOv8的预测流程,涵盖图像预处理(letterBox归一化)、模型推理(Box与Cls解码)、后处理(NMS与Scale_boxes)模块。通过理解每个阶段的作用,帮助读者掌握目标检测模型的工作原理。
本文深入解析YOLOv8的预测流程,涵盖图像预处理(letterBox归一化)、模型推理(Box与Cls解码)、后处理(NMS与Scale_boxes)模块。通过理解每个阶段的作用,帮助读者掌握目标检测模型的工作原理。
1.前言
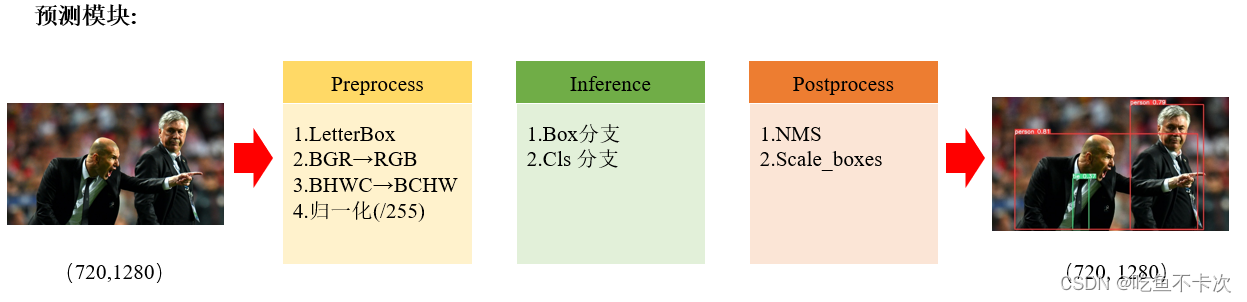
预测模块主要是对图片进行预测的过程,分成了以下三个流程:图像预处理(Preprocess)、模型推理(Inference)以及后处理模块(Postprocess)。
输入一张任意尺寸的图片,首先需要先对图片进行预处理,使其宽高能够符合网络输入尺寸(比如640x640)并且进行归一化等其他处理;接着对预处理后的图片输入网络得到Box和Cls两个预测结果;最后需要对这两个预测结果进行解码等后处理操作,如下图所示:
后面的章节将按照这三个顺序来展开说明。
2.图像预处理模块
预处理流程,这一步主要是对图像进行预处理,包括:letterbox、BGR转换成RGB、拓展成四个维度并且调整维度顺序以及归一化这四个步骤.
首先介绍一下letterBox操作,在YOLOv8中,Letterbox的作用是为了将图像在不改变原始宽高比例的情况下,缩放成一个统一的图像尺寸,但是在训练、验证和预测时候的Lette

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 3628
3628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











