







 本文深入探讨了复数的基本概念,包括复数的模、共轭及不同表示形式,并介绍了欧拉公式及其证明。此外,详细阐述了极坐标、圆柱坐标和球坐标系的定义、转换及其在物理学和工程中的应用。内容涵盖复数的除法、复平面上的意义以及复数在系统分析和信号处理中的作用。
本文深入探讨了复数的基本概念,包括复数的模、共轭及不同表示形式,并介绍了欧拉公式及其证明。此外,详细阐述了极坐标、圆柱坐标和球坐标系的定义、转换及其在物理学和工程中的应用。内容涵盖复数的除法、复平面上的意义以及复数在系统分析和信号处理中的作用。
一、复数
1.基本概念
复数:形如(a、b均为实数)的数,a为实部、b为虚部,i为虚数单位。当b=0时,z为实数;当a=0时,z为纯虚数。
复数的模:;
共轭复数:实部a相等,虚部b互为相反数,表达式为。
复数的表现形式:
代数形式:;
三角函数形式:形如;
指数形式:形如;
;
极坐标形式:形如
代数形式与三角形式的互相转换:;
;
;
复数的除法:需将分母实数化后再进行乘法。
复数在复平面里的意义:在复平面里,x轴为实部,y轴为虚部;代数形式可直接体现在坐标上,实复数的模就是该复数到坐标原点的距离;而这个复数与原点的连线与x轴正半轴的夹角就是值;灵活使用复数的四种形式可以使计算简化和便于理解。以代数形式计算时遵循四则运算,只需注意除法;以指数运算时可以理解为模的运算和角度的运算。
复数的应用:复数本身是没有意义的,只有放在特定领域里才有意思,常用的领域有系统分析(分析其极点与零点)、信号分析(用来进行时域频域的转换、表示周期信号)、数学领域的反常积分、量子力学与相对论、应用数学的特征方程求解等。
2.欧拉公式
欧拉公式的一般形式: ,当
时,即有
;
;
;
;
;
欧拉公式的证明:欧拉公式的证明分为复变函数的欧拉公式证明与几何拓扑学的欧拉公式证明,在此只讨论复变函数内的欧拉公式证明。
证明:基本通过泰勒展开来证明,依次展开、
、
,将
的展开式中的
换成
,可得
.
3.棣莫弗定理
假设,
,则有
;
一般形式有;
二、坐标系
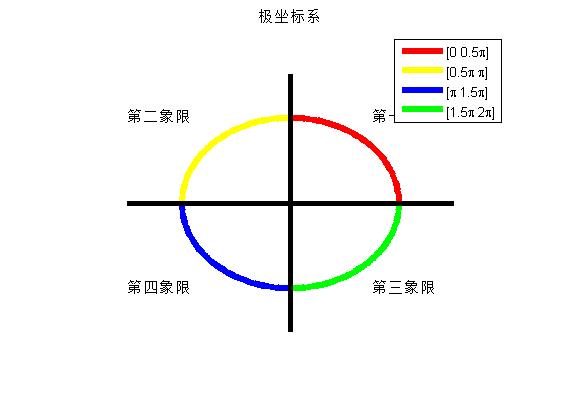
1.极坐标系
极坐标系:polar coordinate,是指平面内由极点、极轴、极经组成的坐标系。在极坐标中取一点O可称为极点,引一条射线Ox可称为极轴,规定角度取逆时针为正,长度定义为,角度定义为
,记为
。
极坐标系直角坐标系:
,
直角坐标系极坐标系:
.
极坐标的意义:用于定位和导航、开普勒定律
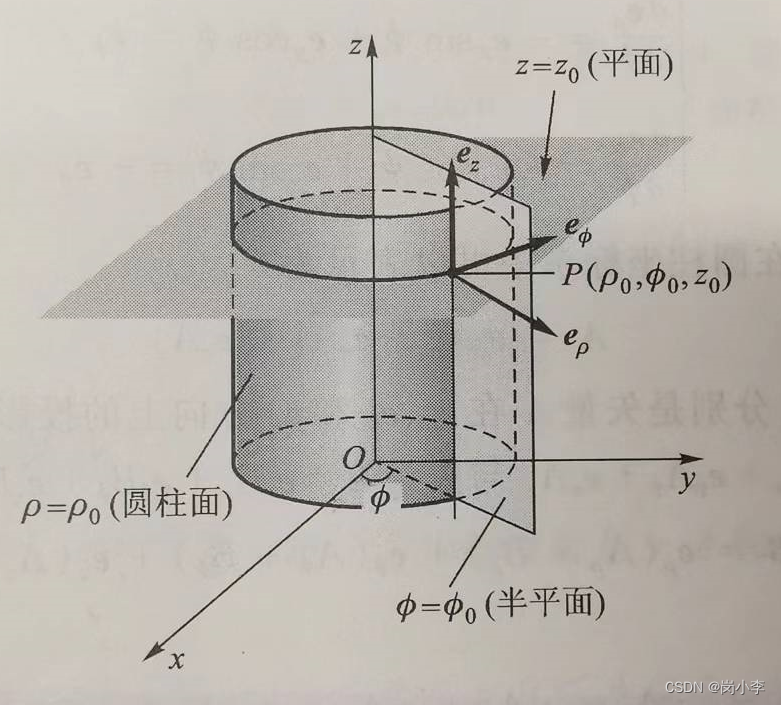
2.圆柱坐标系
圆柱坐标系:是一种三维坐标系统,可以看成是二维坐标系往z轴的延伸,添加的第三个坐标值专门用来表示P点离xy平面的高低。表示径向距离,
表示方位角,
表示高度,一般表现形式为
.
圆柱坐标系直角坐标系:
直角坐标系圆柱坐标系:
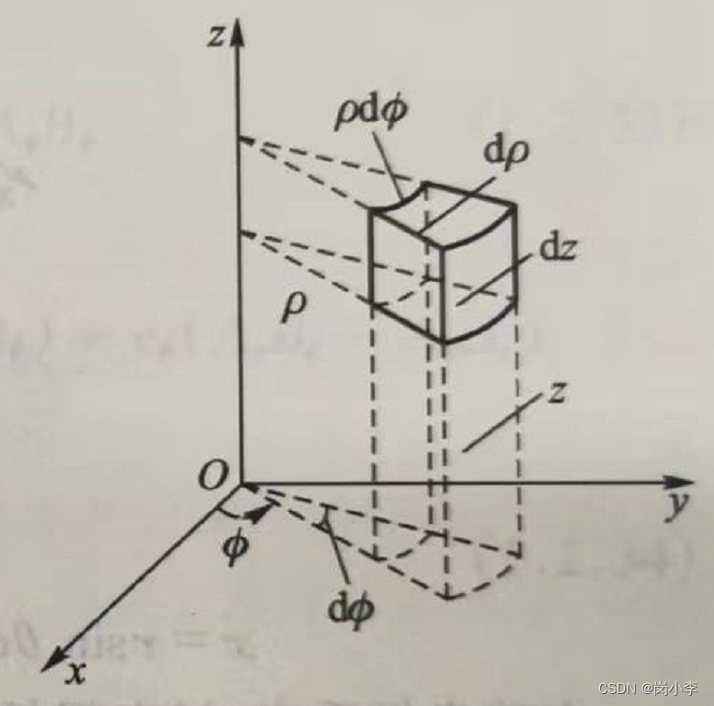
体积元:圆柱坐标系的体积元需要先求出面元,三个面元可分别求出:
则单位体积元为
.
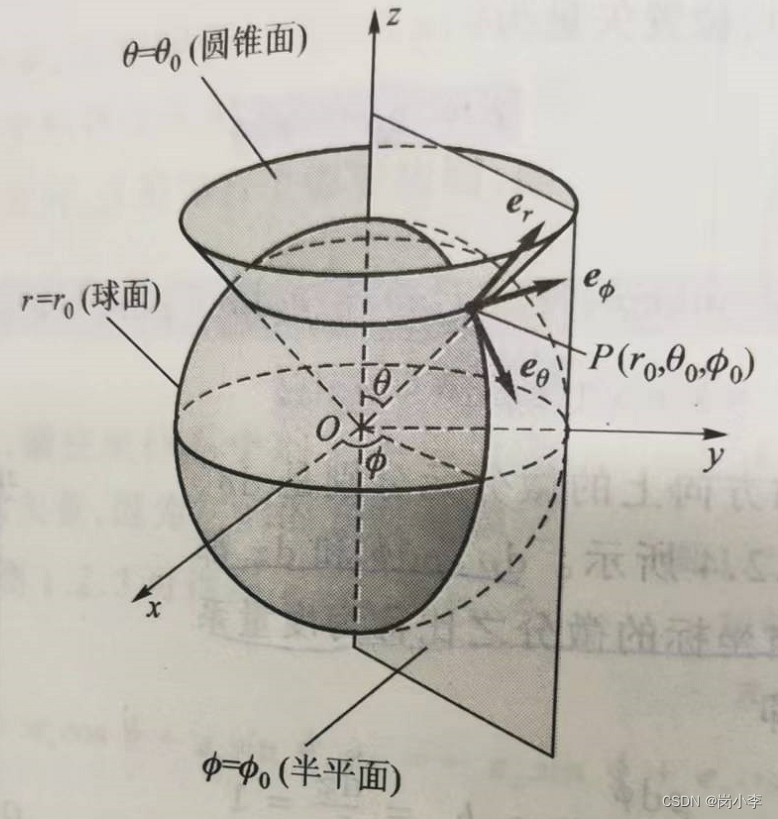
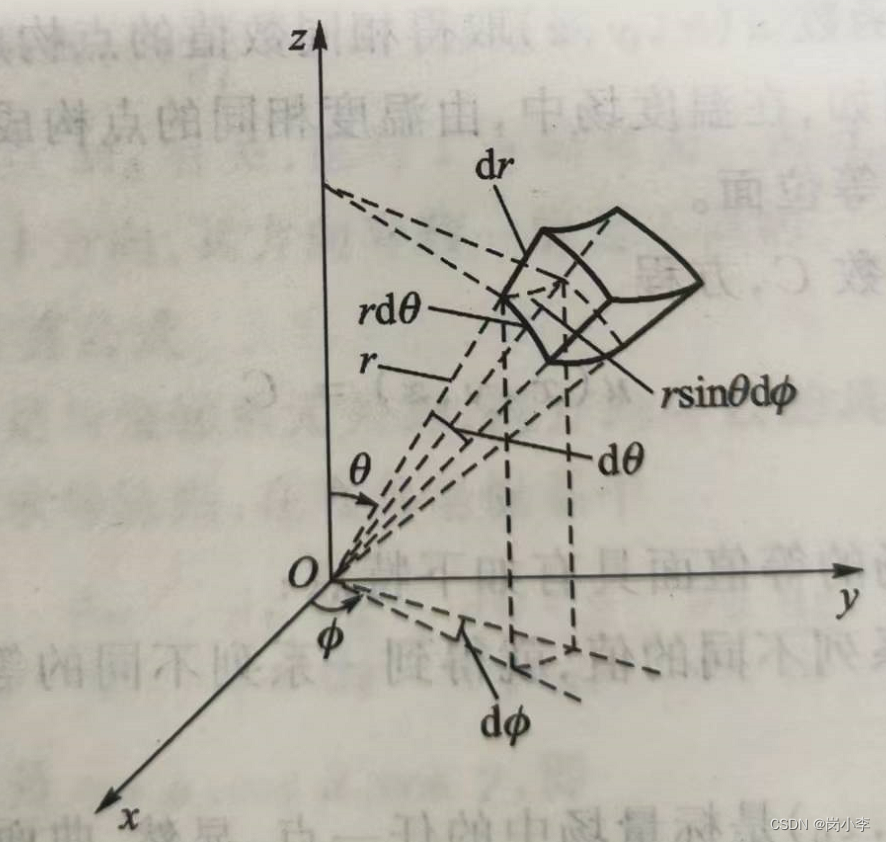
3.球坐标系
球坐标系:属于三维坐标系的一种,由方位角、仰角
和距离
构成,表达式为
.
球坐标系直角坐标系:
直角坐标系球坐标系:
体积元:.



















 3092
3092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











