







autoware.universe源码略读1:common包
- Autoware ad api specs(接口)
- Autoware auto common(常规定义)
- autoware_auto_geometry(几何学)
- autoware_auto_perception_rviz_plugin(感知结果rviz可视化)
- autoware_auto_tf2(坐标转换)
- autoware_point_types(点类型)
- autoware_testing(冒烟测试)
- bag_time_manager_rviz_plugin(ROSBAG时间)
- component_interface_specs(组件接口)
- component_interface_utils(rclcpp工具)
- cuda_utils(CUDA工具)
- fake_test_node(GTEST测试)
- global_params.launch.py(全局参数)
- goal_distance_calculator(目标距离计算)
- grid_map_utils(网格地图)
- interpolation(插值)
- kalman_filter(卡尔曼滤波)
- motion_utils(车辆的运动状态)
- osqp_interface(OSQP库接口)
- path_distance_calculator(计算到某个路径的距离)
- perception_utils(感知模块的常用函数)
- polar_grid(rviz极坐标网格可视化)
- rtc_manager_rviz_plugin(RTC可视化)
- signal_processing(信号处理)
- tensorrt_common(TensorRT库)
- tier4_api_utils(旧接口)
- tier4_autoware_utils(常用函数库)
- tier4_calibration_rviz_plugin(可视化)
- tier4_control_rviz_plugin(可视化+1)
- tier4_datetime_rviz_plugin(还是可视化)
- tier4_debug_rviz_plugin(继续可视化)
- tier4_debug_tools(调试工具)
- tier4_localization_rviz_plugin(又来可视化,定位轨迹)
- tier4_perception_rviz_plugin(感知可视化)
- tier4_planning_rviz_plugin(路径规划的可视化)
- tier4_screen_capture_rviz_plugin(屏幕抓取)
- tier4_simulated_clock_rviz_plugin(时间控制)
- tier4_state_rviz_plugin(状态展示)
- tier4_traffic_light_rviz_plugin(红绿灯)
- tier4_vehicle_rviz_plugin(车辆行驶信息)
- time_utils(时间消息)
- trtexec_vendor(TensorRT可执行文件)
- tvm_utility(端到端深度学习编译器)
- web_controller(网络连接)
- 总结
Autoware ad api specs(接口)
autoware.universe的接口规范,在autoware/src/universe/autoware.universe/system/default_ad_api/src/operation_mode.hpp默认接口中有使用到
Autoware auto common(常规定义)
定义了一些常用的数据类型、函数等,像在common/types.hpp类可以找到PointXYZ各种类型的定义,以及在helper_functions/float_comparisons中还可以找到一些数据比较的函数,这里比较有趣的是这个比例比较,计算两个的差,判断差值占最大值的比例是否满足要求
template <typename T>
bool rel_eq(const T & a, const T & b, const T & rel_eps)
{
static_assert(
std::is_floating_point<T>::value, "Float comparisons only support floating point types.");
const auto delta = std::abs(a - b);
const auto larger = std::max(std::abs(a), std::abs(b));
const auto max_rel_delta = (larger * rel_eps); // 大值×比例阈值
return delta <= max_rel_delta;
}
剩下的还有个马氏距离的计算,源码还贴心地给了原理的注释
/// \brief Calculate square of mahalanobis distance
/// \tparam T Type of elements in the matrix
/// \tparam kNumOfStates Number of states
/// \param sample Single column matrix containing sample whose distance needs to be computed
/// \param mean Single column matrix containing mean of samples received so far
/// \param covariance_factor Covariance matrix
/// \return Square of mahalanobis distance
template <typename T, std::int32_t kNumOfStates>
types::float32_t calculate_squared_mahalanobis_distance(
const Eigen::Matrix<T, kNumOfStates, 1> & sample, const Eigen::Matrix<T, kNumOfStates, 1> & mean,
const Eigen::Matrix<T, kNumOfStates, kNumOfStates> & covariance_factor)
{
using Vector = Eigen::Matrix<T, kNumOfStates, 1>;
// This is equivalent to the squared Mahalanobis distance of the form: diff.T * C.inv() * diff
// Instead of the covariance matrix C we have its lower-triangular factor L, such that C = L * L.T
// squared_mahalanobis_distance = diff.T * C.inv() * diff
// = diff.T * (L * L.T).inv() * diff
// = diff.T * L.T.inv() * L.inv() * diff
// = (L.inv() * diff).T * (L.inv() * diff)
// this allows us to efficiently find the squared Mahalanobis distance using (L.inv() * diff),
// which can be found as a solution to: L * x = diff.
const Vector diff = sample - mean;
const Vector x = covariance_factor.ldlt().solve(diff);
return x.transpose() * x;
}
源码还贴心地用gtest写了对应的测试,就在对应的test文件夹下,生成的test文件在build里也可以找到,可以直接执行
当然也可以用colcon工具来查看测试结果
colcon test --packages-select autoware_auto_common
colcon test-result --all
autoware_auto_geometry(几何学)
这里把几个文件都粗略的过了一遍,应该主要用处是后续点云聚类之后生成被检测物体时使用。像主要的功能有根据点生成多边形凸包,然后找到能cover这个凸包的矩形以及对应的信息
bounding_box_common
感觉这个是(二维)物体的边界相关的一些函数
| 函数名 | 作用 |
|---|---|
compute_height | 计算Z轴高度信息 |
size_2d | 计算长度和宽度 |
finalize_box | 根据角点来计算物体的一个水平yaw角,并且计算得到中心点 |
剩下的还有一些类似根据角点来生成对应形状(make_shape)以及生成检测到的物体(make_detected_object)等等函数,就不一一记录了
eigenbox_2d
这里面主要的作用就是生成这个2D的box
| 函数名 | 作用 |
|---|---|
covariance_2d | 计算协方差 |
eig_2d | 计算特征向量和特征值 |
compute_supports | 用于计算支撑点。支撑点是包围某个点集的最远点,用于确定包围盒的边界 |
compute_bounding_box | 用于生成边界 |
上述函数在eigenbox_2d函数中都有被使用到,总体生成二维物体的思路就是:
计算协方差–生成特征向量并找到能覆盖住的二维边界值–生成边界,确定形状
lift
这个文件实现了一个用于估计二维定向边界框的拟合算法,它可以在给定一组点的情况下,找到最佳拟合方向,并生成对应的矩形,这里的算法是参考了论文《Efficient L-shape fitting of laser scanner data for vehicle pose estimation》,文章这里就不精读了,感兴趣的可以看看大佬做的总结
【摸鱼读paper】L-Shape fitting:基于L-Shape的3DLidar障碍物位姿估计 - 等我一下就好啦的文章 - 知乎
rotating_calipers
这个感觉是通过不停地旋转,来寻找最好的拟合边界的过程,主要的过程都在rotating_calipers_impl里
下边给了两种接口,一种是直接传点的迭代器,另一种是直接传点的列表
common_2d
2D点的一些函数,像取出x、y,以及相加相减、旋转等等,里面有一些函数感觉自己也是可以拿出来用的
| 函数名 | 作用 |
|---|---|
intersection_2d | 计算两条直线的交点 |
closest_segment_point_2d | 找到直线上距离目标点最近的点 |
check_point_position_to_line_2d | 判断点和直线的位置关系 |
common_3d
3D点的几个简单函数,包括3D点的内积、距离
convex_hull
这个文件主要是实现了凸包算法,关于什么是凸包,可以参考凸包-维基百科,通俗点理解感觉就是把所有的点能包围住的一个形状,这里的凸包算法可以看一下这篇文章2D凸包算法(三):Andrew’s Monotone Chain
hull_pockets
这个好像是找到多边形和凸包之间的形状的部分,根据对应的gtest文件test_hull_pockets.hpp来看是这样的,但是我感觉里面有一个注释应该是不太对劲。。。

这里我没懂为什么是top left有一个,而且这个图画得好像也不太对劲,把对应得gtest修改一下,再重新编译试了下
ASSERT_FLOAT_EQ(x_(pockets[0][0]), 4.0);
ASSERT_FLOAT_EQ(y_(pockets[0][0]), 5.0);
ASSERT_FLOAT_EQ(x_(pockets[0][1]), 4.0);
ASSERT_FLOAT_EQ(y_(pockets[0][1]), 2.0);
ASSERT_FLOAT_EQ(x_(pockets[0][2]), 2.0); // 自己把后两个顶点也加上了
ASSERT_FLOAT_EQ(y_(pockets[0][2]), 2.0);
ASSERT_FLOAT_EQ(x_(pockets[0][3]), 2.0);
ASSERT_FLOAT_EQ(y_(pockets[0][3]), 5.0);
这里全部的gtest都通过了,也就是说明自己加的这两个点也没有问题。所以这里其实就是正上方的一个正方形
intersection(多边形交叉)
这个在官方文档有单独一页的介绍,具体来讲就是得到了两个多边形的交叉区域,并且能够标注出来
- 首先第一个函数,
get_sorted_face_list,我之前以为在convec_hull后得到的就是凸包点了,结果这里又看了下,那里得到的指向凸包点下一个点的迭代器(也就是内点,应该是这么理解吧?),所以这个函数的作用就是把所有的凸包点给拿出来放在一个vector里了 - 下一个函数
append_contained_points把输入的internal多边形里在external多边形里的点拿了出来 append_intersection_points是计算两个多边形的所有交点了,这里的逻辑是依次遍历两个两个多边形的两个点形成的边,然后让edge1和edge1用intersection_2d函数来计算交点,再判断交点是不是在两个线段的范围内,在的话就放入resultintersect判断两个多边形是否相交的函数(但没找到哪里有使用这个函数),这里用到了分离轴定理,简单说就是依次选择两个多边形边对应的法向量,如果两个多边形在某一个法向量上的投影存在重叠,那就说明两个多边形相交了convex_polygon_intersection2d把两个多边形的所有交点,以及重叠区域的点存放在result里,并且根据这些点也生成了一个凸包convex_intersection_over_union_2d看起来是把两个多边形连着相交区域一起合二为一了
interval
感觉就是(x,y)这种东西,然后写了一些类似两个区间是否有共同范围之类的函数
lookup_table
一维查找表的相关函数,最后的loopup_1d和LookupTable1D是封装后的函数
| 函数名 | 作用 |
|---|---|
interpolate | 一维插值 |
lookup_impl_1d | 实现了一维查找的核心逻辑。接受一个查询值,并在给定的定义域上执行查找操作,返回对应的插值结果 |
check_table_lookup_invariants | 检查了定义域和值域是否为空,以及定义域是否按升序排列 |
spatial_hash
空间hash表在官网也有相对详细的解释,原话是The spatial hash is a data structure designed for efficient fixed-radius near-neighbor queries in low dimensions,所以简单理解就是用来处理点云最近邻问题的。这里主要分为两部分,第一部分是配置部分,也就是spatial_hash_config.hpp,首先配置了x,y,z三个方向的最大最小值,查询半径(这里也就是指进行查找的时候一个单元格的大小,因为看后边的bin_rane函数可以看出来,确定所以的时候是用输入的最大范围radius除这个半径的),以及最大步长之类的信息。然后在spatial_hash.hpp里,主要实现了2D和3D两类,其中涉及到的函数封装比较多,比如最底层的bin_impl是把点索引变成一位索引的函数,但是封装了基层才在insert函数中调用。然后比较重要的可能就是near_impl函数了,这个主要就是先根据输入的参考点,生成对应的bin_range,然后遍历所有的体素,进行距离的比较。
/// \brief Finds all points within a fixed radius of a reference point
/// \param[in] x The x component of the reference point
/// \param[in] y The y component of the reference point
/// \param[in] z The z component of the reference point, respected only if the spatial hash is not
/// 2D.
/// \param[in] radius The radius within which to find all near points
/// \return A const reference to a vector containing iterators pointing to
/// all points within the radius, and the actual distance to the reference point
const OutputVector & near_impl(
const float32_t x, const float32_t y, const float32_t z, const float32_t radius)
{
// reset output
m_neighbors.clear();
// Compute bin, bin range
const Index3 ref_idx = m_config.index3(x, y, z); // 参考点索引
const float32_t radius2 = radius * radius;
const details::BinRange idx_range = m_config.bin_range(ref_idx, radius); // 半径范围内的bin
Index3 idx = idx_range.first;
// For bins in radius
do { // guaranteed to have at least the bin ref_idx is in
// update book-keeping
++m_bins_hit;
// Iterating in a square/cube pattern is easier than constructing sphere pattern
if (m_config.is_candidate_bin(ref_idx, idx, radius2)) { // 当前的bin在不在候选bin中
// For point in bin
const Index jdx = m_config.index(idx);
const auto range = m_hash.equal_range(jdx);
for (auto it = range.first; it != range.second; ++it) {
const auto & pt = it->second;
const float32_t dist2 = m_config.distance_squared(x, y, z, pt);
if (dist2 <= radius2) { // 距离比较,符合要求的就加入到结果列表中
// Only compute true distance if necessary
m_neighbors.emplace_back(it, sqrtf(dist2));
}
}
}
} while (m_config.next_bin(idx_range, idx)); // 这里更新遍历的索引
// update book-keeping
m_neighbors_found += m_neighbors.size();
return m_neighbors;
}
当然这个函数也被封装了一层,最终的调用是near函数,也是针对PointT和x,y,z两种形式进行了适配。
visuibility_control
这个应该是用来做代码可见性控制的,在后边很多包里都用到了
GEOMETRY_PUBLIC就是对其他模块也可见
GEOMETRY_LOCAL应该就是仅对当前模块可见,搜了下好像只有insert_impl一个函数是仅当前模块可见的
autoware_auto_perception_rviz_plugin(感知结果rviz可视化)
这个主要是用来做可视化的,把感知检测到的物体在rviz界面可视化出来,主要分成了三种
-
检测到的物体(detected_objects)
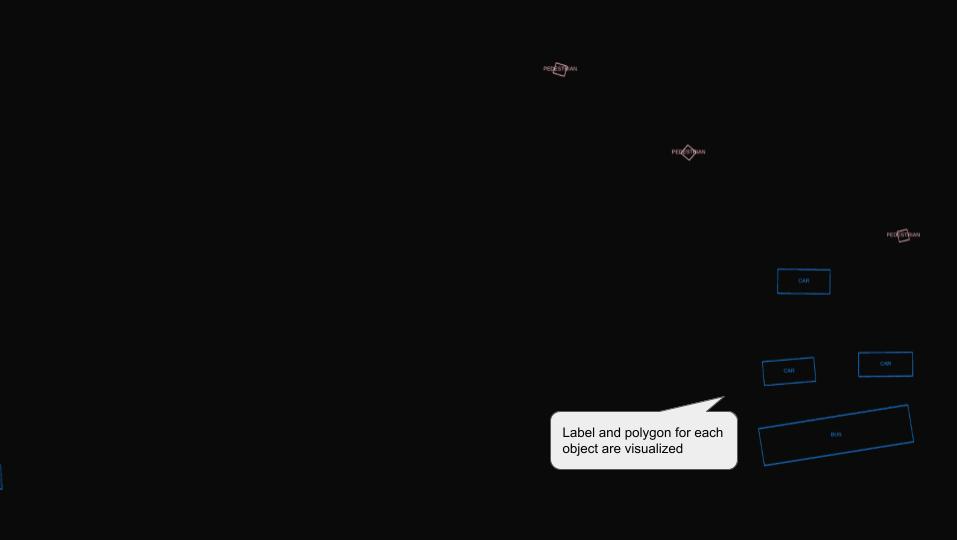
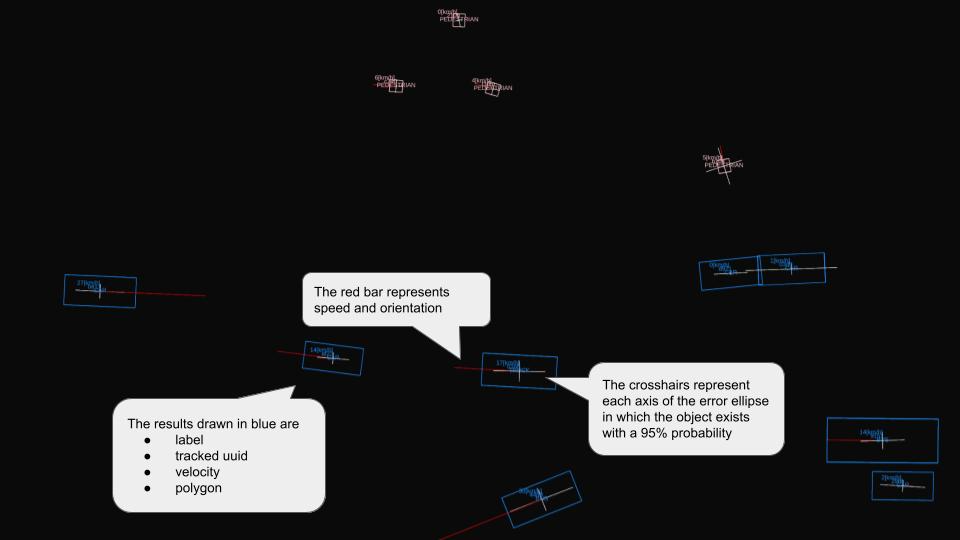
-
跟踪到的物体(tracked_objects)–速度、方向信息等
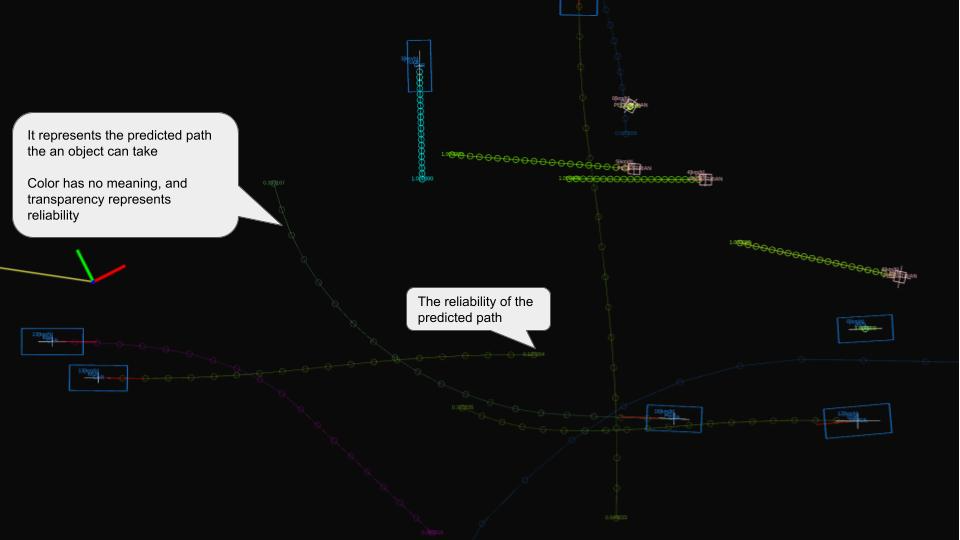
-
预测的物体(predicted_objects)–预测的轨迹线
这里在物体基类成员变量的类型都是rviz_common::properties::BoolProperty,ROS官方文档,主要的输入参数可以概括成
m_display_3d_property = new rviz_common::properties::BoolProperty(
"Display 3D", // The name of the property in the property tree
true, // Default value
"Enable or disable 3D display", // Description of the property
this, // The parent property
SLOT(update3DDisplay()), // Slot to call when the property changes
this); // The receiver object for the slot
然后基类里还是先了把接收到的msg分别转换为对应的形状的函数,包括预测轨迹等,然后主要的物体包括
kDefaultObjectPropertyValues = {
{autoware_auto_perception_msgs::msg::ObjectClassification::UNKNOWN,
{"UNKNOWN", {255, 255, 255}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::CAR, {"CAR", {30, 144, 255}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::BUS, {"BUS", {30, 144, 255}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::PEDESTRIAN,
{"PEDESTRIAN", {255, 192, 203}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::BICYCLE, {"CYCLIST", {119, 11, 32}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::MOTORCYCLE,
{"MOTORCYCLE", {119, 11, 32}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::TRAILER,
{"TRAILER", {30, 144, 255}}},
{autoware_auto_perception_msgs::msg::ObjectClassification::TRUCK, {"TRUCK", {30, 144, 255}}}};
剩下的大部分都是具体的可视化部分的代码,这里就不做仔细阅读了,后边如果需要自己改的话可以找一下对应部分删删补补应该就好
autoware_auto_tf2(坐标转换)
开发文档里说这个部分是为了"The autoware_auto_tf2 package aims to provide developers with tools to transform applicable autoware_auto_msgs types. In addition to this, this package also provides transform tools for messages types in geometry_msgs missing in tf2_geometry_msgs.",所以这里主要就是为了一些消息类型做运动学和动力学变换,关于KDL我也不了解,这里找了下用到这个变换的部分
// common/autoware_auto_gepmetry
std::vector<geometry_msgs::msg::Point32> GEOMETRY_PUBLIC get_transformed_corners(
const autoware_auto_perception_msgs::msg::Shape & shape_msg,
const geometry_msgs::msg::Point & centroid, const geometry_msgs::msg::Quaternion & orientation)
{
std::vector<geometry_msgs::msg::Point32> retval(shape_msg.footprint.points.size());
geometry_msgs::msg::TransformStamped tf;
tf.transform.rotation = orientation;
tf.transform.translation.x = centroid.x;
tf.transform.translation.y = centroid.y;
tf.transform.translation.z = centroid.z;
for (size_t i = 0U; i < shape_msg.footprint.points.size(); ++i) {
tf2::doTransform(shape_msg.footprint.points[i], retval[i], tf);
}
return retval;
}
这里我感觉就是从局部坐标系转换到全局坐标系下了,主要有点的变换、四元数(表示旋转)的变换。关于KDL的具体内容需要的话再看
autoware_point_types(点类型)
这里就是定义了一些点的类型,在之前的文件中也已经频繁使用了,PointXYZI应该就是最基本的类型,包含了三轴坐标和一个intensity信息,然后PointXYZIRADRT感觉上是那种激光点云的点,里面还有ring(在哪个线束?),azimuth(方位角)以及distance(距离)和时间戳这种信息
autoware_testing(冒烟测试)
冒烟测试的相关内容,参考官方文档吧
bag_time_manager_rviz_plugin(ROSBAG时间)
这个也没什么好说的,主要是在rviz界面也能控制rosbag包的时间特性了,比如暂停以及倍速播放之类的
component_interface_specs(组件接口)
这里主要是几个组件的接口规范定义,包括了控制(control)、定位(localization)、规划(planning)以及系统(system)四个部分,在后续对应的部分都有这些接口的使用
component_interface_utils(rclcpp工具)
这个包感觉主要是为了rclcpp而写的接口,里面包括服务端和客户端创建、发布和订阅消息等的接口,像topic_publisher就是消息发布的一个类,后边也有使用到,但是没看出来和rclcpp自己的有什么区别。。主要的函数似乎是在rclcpp.hpp里,里面有初始化各种服务类型的函数,似乎是后边很多地方用到了这里的NodeAdaptor这个类
cuda_utils(CUDA工具)
我以前也没接触过CUDA的东西,这里的这几个函数就只能大概猜了一下
cuda_check_error:检查 CUDA 函数调用是否出错,并在出错时抛出异常cuda_unique_ptr:这个感觉就是针对CUDA进行了智能指针的设计,更好地管理涉及到CUDA的内存?stream_unique_ptr:CUDA流相关,包括销毁流以及生成流
fake_test_node(GTEST测试)
这个主要是为了在gtest需要使用到ROS进行发布订阅消息时而定义的两个类,官方对两个类的描述分别是

这里我的理解TEST_P就是带有参数版本的TEST_F(也不知道这么理解对不对),具体的使用看了下test_fake_test_node,可以看到里面的两个测试的部分
TEST_F(FakeNodeFixture, Test) { run_test(15, this); }
INSTANTIATE_TEST_SUITE_P( // 这里传参
FakeNodeFixtureTests, FakeNodeFixtureParametrized,
// cppcheck-suppress syntaxError // cppcheck doesn't like the trailing comma.
::testing::Values(-5, 0, 42));
/// @test Test that we can use a parametrized test.
TEST_P(FakeNodeFixtureParametrized, Test) { run_test(GetParam(), this); }
再结合实际运行gtest的结果
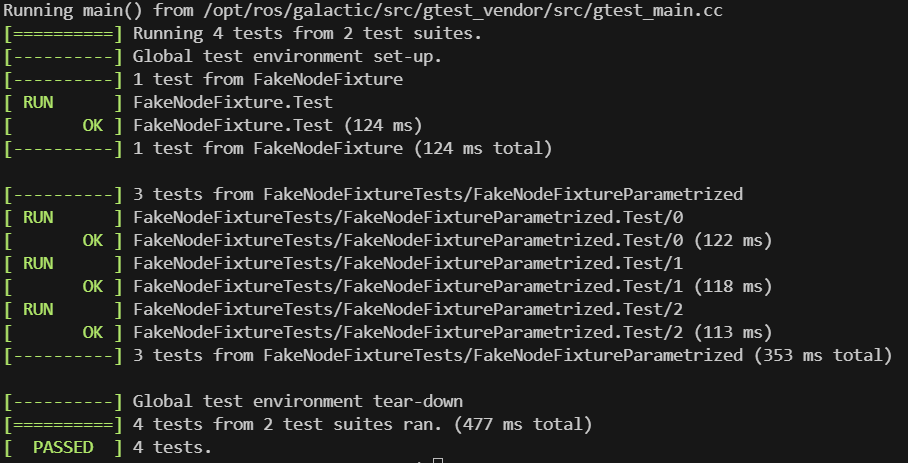
所以上边testing::Values(-5, 0, 42))这里就是输入的参数了,然后还有需要注意的一点是,这里其实是先定义了一个FakeNodeCore类,里面实现了set_up和tear_down两个必须的部分(参考文章:linux geogle test教程及TEST_F,TEST_P宏用法),然后FakeTestNode和FakeTestNodeParametrized都是继承这个类实现的。这里感觉也能体现出一些ROS2和ROS1的不同之处,ROS2单独再整理太费时了,就这样边看边学吧
global_params.launch.py(全局参数)
这个相当于是ROS2下的一个launch文件,因为ROS2其实是更推荐使用python来编写launch文件的(对ROS 2Launch文件使用Python、XML和YAML)。结合了一下实际调用launch的时候,是需要输入vehicle_model这个参数的,而use_sim_time这个参数应该表示的是是否使用仿真时间,在generate_launch_description里有给出false的默认值
goal_distance_calculator(目标距离计算)
这个其实是把别的包里的函数封装好后的接口
struct Input
{
geometry_msgs::msg::PoseStamped::ConstSharedPtr current_pose; // 当前位姿
autoware_auto_planning_msgs::msg::Route::ConstSharedPtr route; // 路径
};
struct Output
{
PoseDeviation goal_deviation; // 目标偏差(lateral/m, longitudinal/m, heading(deg/rad))
};
然后这里又是ROS2的一个新特性了,我本来以为这个长得比较像ros::nodelet,然后具体启动这个节点的话也需要显示地调用一下,结果搜了一下好像ROS2中节点直接在launch文件里调就行,就像这个节点,具体的调用在goal_distance_calculator/launch这里
<node pkg="goal_distance_calculator" exec="goal_distance_calculator_node" name="goal_distance_calculator" output="screen">
<param from="$(var config_file)"/>
<param name="oneshot" value="$(var oneshot)"/>
</node>
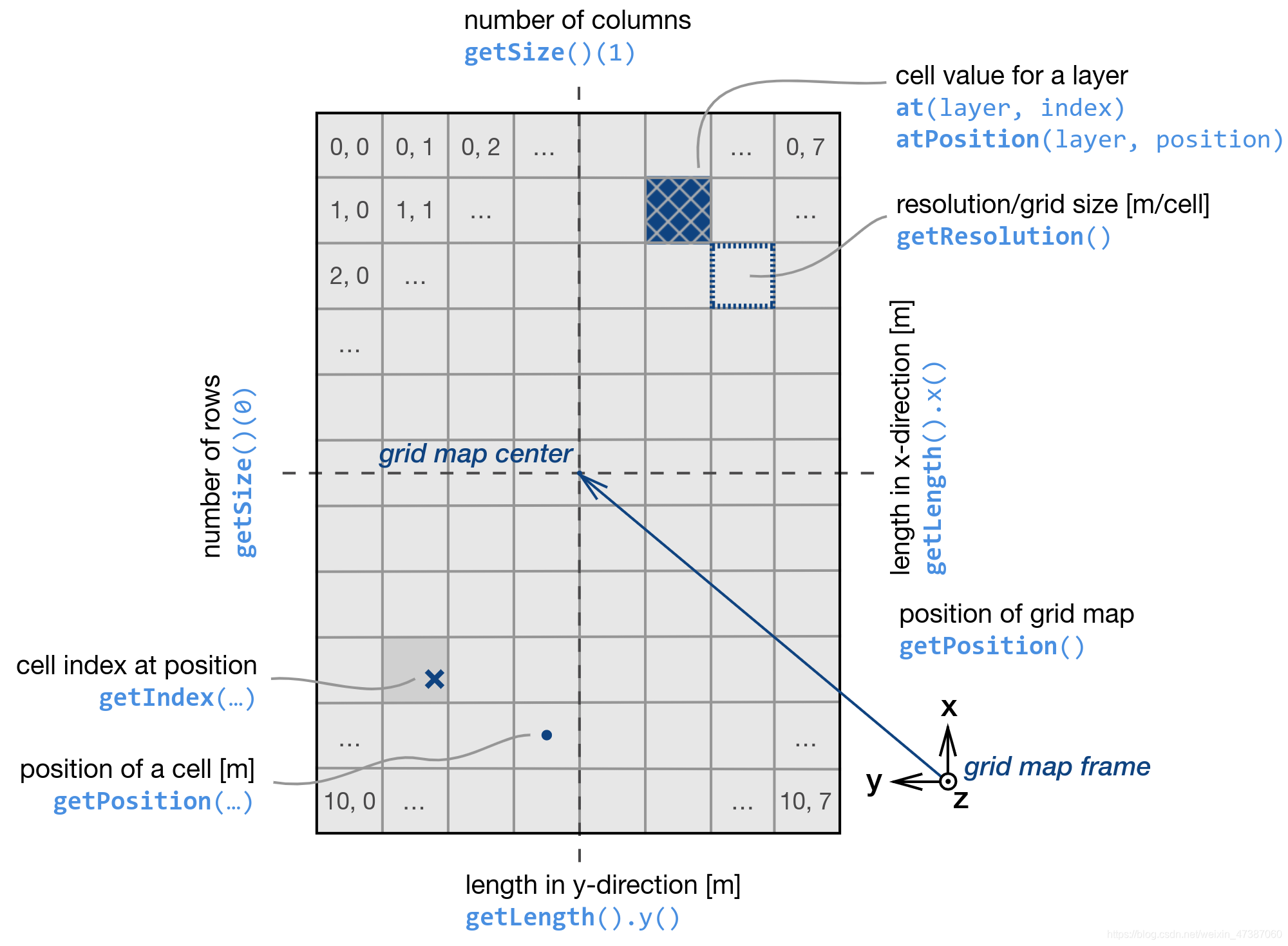
grid_map_utils(网格地图)
官方文档说的是”This packages contains a re-implementation of the grid_map::PolygonIterator used to iterate over all cells of a grid map contained inside some polygon.“,其中grid_map我搜了下应该是一个网格地图相关的库,grid_map::PolygonIterator这个函数应该就是其中的一个多边形迭代器,用于遍历网格地图中由多边形定义的区域,然后Autoware这里是基于扫描线算法重新实现了下这个函数
类的两个参数还是网格地图grid_map::GridMap & grid_map与多边形grid_map::Polygon & polygon两个
| 函数名 | 作用 |
|---|---|
calculateSortedEdges | 对边进行排序,严格按照大x指向小x的顺序 |
calculateIntersectionsPerLine | 计算扫描线和多边形边的交点 |
check_table_lookup_invariants | 获得能够覆盖给定边的行范围 |
这里的grid_map涉及到了一些position,自己想没太想明白,看了grid_map库grid_map_core中move解析之后豁然开朗,简单理解就是索引是从grid自己左上开始编号,然后position是中心相对grid map的,比如在test_polygon_iterator设置了大小为(8,5),那么索引最多对应就是(7,4)了
interpolation(插值)
interpolation_utils
主要功能是检查待插值的数据是否有效
validateKeys判断查询的点(query_keys)是否有效validateKeysAndValues索引和值是否有效
linear_interpolation
简单的线性插值,没什么好说的
spherical_linear_interpolation
球面线性插值,主要是对四元数进行的处理的。这里用的是tf2::slerp函数,关于这个的具体原理可以参考这篇文章四元数的球面线性插值(slerp)
spline_interpolation
这个文件对应的是样条插值
其中spline_interpolation对应的是样条插值的实现,官方文档有对于样条插值的简单介绍,
calcSplineCoefficients的作用是计算样条系数的,我们可以看到最终的问题其实是一个三对角矩阵问题
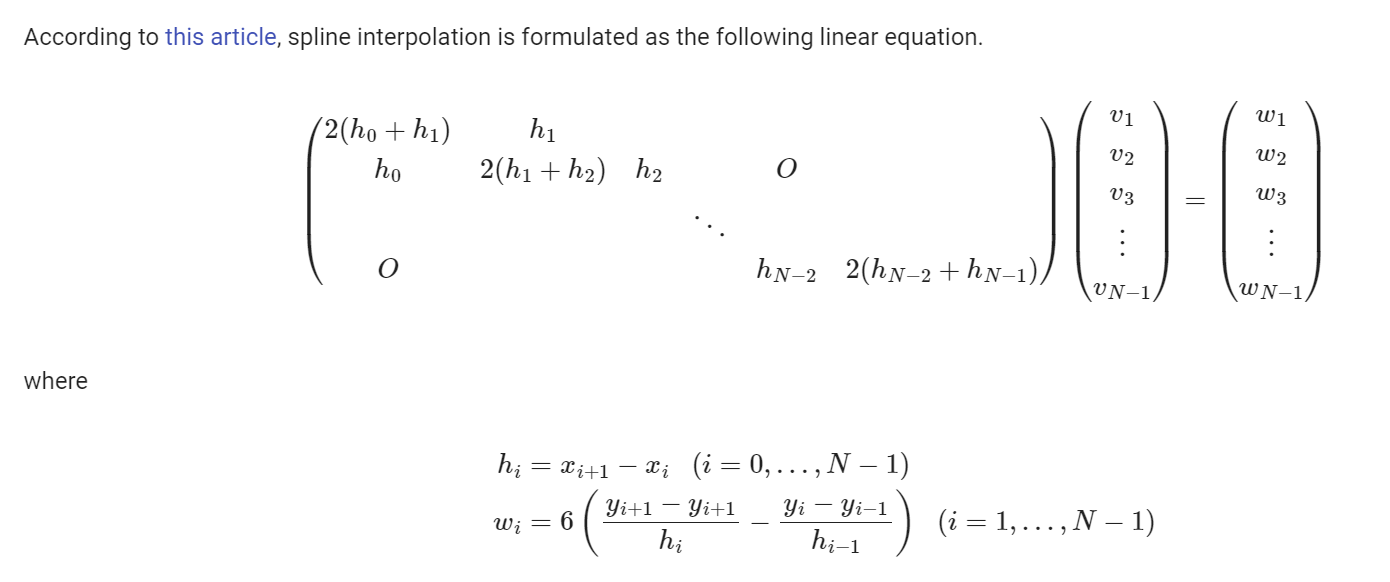
所以根据TDMA算法(对应代码中的solveTridiagonalMatrixAlgorithm)函数,就可以计算出样条系数
之后的getSplineInterpolatedValues就是计算对应点的插值结果了,getSplineInterpolatedDiffValues计算的是对应的点的导数值
spline是计算插值的接口,包含了计算样条系数的过程,返回计算得到的插值点
此外,还提供了一个Akima插值的方法,对应splineByAkima函数,这个方法似乎会让曲线变得更光滑自然一些
spline_interpolation_points_2d
spline_interpolation_points_2d是2D点的样条插值,是分为了XY坐标插值以及yaw角插值
在SplineInterpolationPoints2d这个类中,把点坐标X、Y和yaw角的插值分开处理了,分别计算样条系数然后分别进行插值。在对点的插值处理中,因为不再是简单的一维数据,所以这里涉及到了欧氏距离,会涉及到每个点到第一个点的欧氏距离,后面的插值也是基于这个距离进行的(应该)。
zero_order_hold
零阶保持,零阶保持的基本思想是在每个区间内保持前一个基准值不变(所以这样插值插出来是一段一段的?),换个意思讲就是找到前一个的值,直接用前一个的值作为当前值了,PS.随便拿出一个GTEST测试看了下,确实是这个意思
{ // straight: query_keys is random
const std::vector<double> base_keys{0.0, 1.0, 2.0, 3.0, 4.0};
const std::vector<double> base_values{0.0, 1.5, 3.0, 4.5, 6.0};
const std::vector<double> query_keys{0.0, 0.7, 1.9, 4.0};
const std::vector<double> ans{0.0, 0.0, 1.5, 6.0};
const auto query_values = interpolation::zero_order_hold(base_keys, base_values, query_keys);
for (size_t i = 0; i < query_values.size(); ++i) {
EXPECT_NEAR(query_values.at(i), ans.at(i), epsilon);
}
}
像这里,0.0和0.7都对应到0.0对应的value,1.9就对应到1.0对应的,4.0就是4.0自己的了
kalman_filter(卡尔曼滤波)
关于卡尔曼滤波,相关的文献非常之多,这里不再赘述,这里对应的参数里面都有写
/**
* @brief initialization of kalman filter
* @param x initial state
* @param A coefficient matrix of x for process model
* @param B coefficient matrix of u for process model
* @param C coefficient matrix of x for measurement model
* @param Q covariance matrix for process model
* @param R covariance matrix for measurement model
* @param P initial covariance of estimated state
*/
Eigen::MatrixXd x_; //!< @brief current estimated state
Eigen::MatrixXd
A_; //!< @brief coefficient matrix of x for process model x[k+1] = A*x[k] + B*u[k]
Eigen::MatrixXd
B_; //!< @brief coefficient matrix of u for process model x[k+1] = A*x[k] + B*u[k]
Eigen::MatrixXd C_; //!< @brief coefficient matrix of x for measurement model y[k] = C * x[k]
Eigen::MatrixXd Q_; //!< @brief covariance matrix for process model x[k+1] = A*x[k] + B*u[k]
Eigen::MatrixXd R_; //!< @brief covariance matrix for measurement model y[k] = C * x[k]
Eigen::MatrixXd P_; //!< @brief covariance of estimated state
predict函数就是预测步骤,然后update函数对应的就是更新环节,里面针对不同的输入状况都预留了对应的接口
至于这里的time_delay_kalman_filter,我没有完全想明白,但看起来应该先是把状态向量扩展了
dim_x_ = x.rows();
dim_x_ex_ = dim_x_ * max_delay_step;
x_ = Eigen::MatrixXd::Zero(dim_x_ex_, 1);
P_ = Eigen::MatrixXd::Zero(dim_x_ex_, dim_x_ex_);
for (int i = 0; i < max_delay_step_; ++i) {
x_.block(i * dim_x_, 0, dim_x_, 1) = x;
P_.block(i * dim_x_, i * dim_x_, dim_x_, dim_x_) = P0;
}
然后在predictWithDelay中,根据时间延迟模型,进行了预测。我的理解就是新的协方差矩阵,是包含当前状态和延迟状态之间的协方差信息的。因为我也没用过这种带有时间延迟的滤波,之后用到的时候再深入研究一下,带有时间延迟的模型如下:

motion_utils(车辆的运动状态)
这个主要是反应车辆运动状态的一个库,里面包含了几个小模块
marker_helper:用来生成marker的,里面好像是针对状态设置了一些虚拟的墙(VirtualWall)resample:对位置Pose、路径Path以及轨迹Trajectory进行重采样的部分,里面主要用到了之前介绍到的插值部分的函数,然后重采样主要可以分成两种,一种是指定长度resampled_arclength,一种是指定采样间隔resample_intervaltrajectory:运动轨迹的一些特性,其中主要的作用就是根据给定的点,以及轨迹线,来找到最近的线段以及点的索引(这里面代码有点多,后边用到的时候具体看一下对应的函数)vehicle:车辆状态的一些反馈,比如车辆是否停止以及是否到达等
osqp_interface(OSQP库接口)
这个模块主要是为OSQP库写的接口,以及进行格式的转换。OSQP库我的理解就是对带有一组线性约束的最小二乘问题进行求解,官方的描述都叫做二次规划(QP),就像官网给出的这种问题一样

这里先定义了CSC矩阵,即列压缩系数矩阵的转换。稀疏矩阵中大多数元素为零,而CSC格式只存储非零元素及其索引,从而节省内存和提高计算效率。这里的转换很简单,其实就是遍历矩阵元素,然后判断是否为0,不是0的话分别把值存进vals,行索引存进row_idxs,列索引存进col_idxs
在osqp_interface中,构造类的时候的几个矩阵就直接对应了上图中的P、q、l、A和u
/// \brief Constructor with problem setup
/// \param P: (n,n) matrix defining relations between parameters.
/// \param A: (m,n) matrix defining parameter constraints relative to the lower and upper bound.
/// \param q: (n) vector defining the linear cost of the problem.
/// \param l: (m) vector defining the lower bound problem constraint.
/// \param u: (m) vector defining the upper bound problem constraint.
/// \param eps_abs: Absolute convergence tolerance.
OSQPInterface(
const Eigen::MatrixXd & P, const Eigen::MatrixXd & A, const std::vector<double> & q,
const std::vector<double> & l, const std::vector<double> & u, const c_float eps_abs);
OSQPInterface(
const CSC_Matrix & P, const CSC_Matrix & A, const std::vector<double> & q,
const std::vector<double> & l, const std::vector<double> & u, const c_float eps_abs);
如果输入的是Eigen格式的矩阵,就会在initializeProblem函数中,先把矩阵都转换成CSC格式,在初始化的函数里会把这些数据都赋给m_data,然后会初始化OSQPWorkspace,具体的求解会先调用optimize函数,如果格式不对的话还是先格式转换,对了的话直接调用solve函数进行求解(当然里面的核心还是用OSQP自己的函数求解的)。
- 二次规划问题的具体求解原理只是简单看了下,可能没时间和精力去深入学习了
path_distance_calculator(计算到某个路径的距离)
这里核心的计算功能其实是调用之前motion_utils包里的calcSignedArcLength函数计算距离的,当然这里还进行了path话题的订阅以及~/output/distance这个话题的发布
perception_utils(感知模块的常用函数)
这里的函数应该都是为了感知模块而服务的,具体的感知操作并不在这里~!
conversion
顾名思义,就是一个转换的功能,这里也很简单,把检测到的物体变为要跟踪的物体toTrackedObject(s),以及把跟踪的物体转为要检测的物体toDetectedObject(s)
geometry
得到各种消息类型的物体/位置消息的pose
matching
这里很有意思,这个主要是计算多边形各种特征的。不过之前在autoware_auto_gemotry模块里其实已经写过计算凸包、多边形相交或者相加之类的函数了,但是这里还是用的boost库的一些函数。这里还涉及到一些概念:
- IoU:这个算的是两个多边形重叠区域占总区域的一个比例,我的理解是如果两个完全重合,这个值就是1了,这个时候也就说明检测到的非常准(图片引自深度学习中的IoU概念理解)

- Precision:准确率,与点云匹配中的概念类似,这里计算的是相交区域占源区域的比值
- Recall:召回率,相交区域占目标区域的比值
object_classification
对检测到的物体进行分类,可以看到里面应该是有存是各种物体的可能性的,找到最大可能性的分类。最后得到的都是label,当然看起来这里主要是针对各种vehicle的。
predicted_path_utils
这里是生成预测路线的一些函数,第一个是calcInterpolatedPose,这个主要是根据时间,来对路径上的点进行插值;第二个是resamplePredictedPath预测的路径进行重采样,其实也是插值,只不过上边返回的是点(Pose),这个返回的是路径(Path)。
transform
首先这里的函数定义涉及到了C++17的新特性,这里的maybe_unused是为了避免编译器发出未使用变量或函数的警告。
[[maybe_unused]] inline boost::optional<geometry_msgs::msg::Transform> getTransform(
const tf2_ros::Buffer & tf_buffer, const std::string & source_frame_id,
const std::string & target_frame_id, const rclcpp::Time & time)
这里是使用了ROS自带的坐标转换查询函数lookupTransform,来查询source_frame_id到target_frame_id的转换关系
而另一个函数transformObjects就是利用转换关系对Objects进行坐标转换的函数了,这里的坐标变换都是基于tf2::Transform进行的,包括物体原本的位姿也被转换成了这种类型,之后再直接应用相同类型的转换矩阵,从而实现坐标的转换
polar_grid(rviz极坐标网格可视化)
这里全是可视化的一些东西,这个极坐标网格感觉可能是为雷达点云准备的,或者就是我理解的那个向外扩散的圆弧状的东西的可视化,应该用处就是在以车辆自身为原点向外扩散的部分吧
rtc_manager_rviz_plugin(RTC可视化)
根据ChatGPT的解释:RTC通常指的是 Region of Interest (ROI) Traffic Control。这个概念主要涉及在特定的区域内对交通行为进行控制和管理。RTCManagerPanel是一个用于管理和控制这些区域交通控制(RTC)的面板。
这个看起来依旧是rviz可视化相关的东西,根据README文件,可以实现的作用是:

signal_processing(信号处理)
这个模块主要是包含了数据处理的一些方法,看起来是分为了低通滤波和ButterWorth
lowpass_filter
这里的gain_,代表的就是滤波系数,然后每次都是用上一次的值和当前值进行的一个滤波,计算的公式就是:

butterworth
这个比低通滤波复杂了很多,可以参考Autoware的官方手册以及维基百科的解释。具体的实现原理这里就不再仔细说了
| 函数名 | 作用 |
|---|---|
Buttord | 根据通带和阻带频率以及波纹容限计算滤波器的最小阶数。还计算截止频率 |
computeContinuousTimeRoots | 为每个根计算实部和虚部并存储在数组中 |
poly | 遍历根数组,使用递推公式更新系数数组 |
tensorrt_common(TensorRT库)
这个应该是为了调用TensorRT库而编写的一些函数,看了下应该只是涉及到了模型加载的功能
TensorRT 是 NVIDIA 提供的一种高性能深度学习推理库。它专门用于加速神经网络的推理过程,并且针对 NVIDIA GPU 进行了优化。
TrtCommon构造函数,主要是用来设置相关的配置参数,完成一些初始化相关的工作setup用来加载模型文件,根据模型是否加载成功来设置是否初始化成功loadEngine用来加载engine格式的文件,使用runtime_的deserializeCudaEngine方法反序列化引擎字符串,创建 CUDA 引擎实例。buildEngineFromOnnx用来加载onnx格式的文件,里面涉及到了构建神经网络的过程?不过最终的目的还是为了创建CUDA引擎实例,这里用的是builder->buildEngineWithConfig(*network, *config)这个方法
tier4_api_utils(旧接口)
这个按官方手册的话说是关于logger的一个旧接口,新的接口在component_interface_utils里,所以这里就不看了
tier4_autoware_utils(常用函数库)
按官方文档的话说这里包含了很多其他地方会用到的函数,事实上之前的一些模块也确实用使用到tier4_autoware_utils命名空间的函数。官方文档表示直接或间接地引用tier4_autoware_utils.hpp头文件会在预处理过程中耗费过多的时间,所以后边如果需要二次开发的话应该是删掉这个文件,然后都这直接引用子文件
C++新特性
- maybe_unused:防止一些函数未使用时,编译带来的警告
- nodiscard:函数返回值应该被使用,未被使用时进行警告
- deprecated:标记不推荐使用的实体,编译时生成对应的警告
geometry
看起来Autoware的几何相关的部分是基于boost::geometry实现的,所以在这里首先就定义了一些别名以方便其他地方的使用。
boost::geometry剩下的就是2D点和3D点相关的基本操作,比如相互转换(粗略转换)以及消息类型转换等等。
boost_polygon_utils是针对多边形的,主要功能是生成2D的多边形
geometry各种工具函数,大多不复杂(不过还是有很多函数明明有对应的模块,但还是用第三方库实现的,比如部分插值相关的内容)
path_with_lane_id_geometry对PathPointWithLaneId这个类型的路径的设置
pose_deviation计算位置之间的差值
math
数学常值(圆周率以及重力值),角度归一化,区间生成以及度和弧度转换、m/s与km/h转换
ros
debug_publisher用来发布各种调试信息
debug_traits没太看懂,似乎是把一些消息类型设置成debug消息了?
marker_helper用来生成可视化的标记(Marker)
msg_covariance各个变量之间的协方差对应的索引
msg_operation针对四元数进行的加减号的重载
processing_time_publisher主要是把处理时间转为消息发布
self_pose_listener和transform_listener分别是对自身位置和tf2里转换关系的监听
update_param用来更新参数,wait_for_param用于在 ROS2 中等待获取远程节点的参数值,并通过参数客户端进行参数获取。
stop_watch
用来计时的,本质上还是基于std::chrono实现的
tier4_calibration_rviz_plugin(可视化)
这个也是在rviz中添加了一个panel,看名字是在刹车的时候的地图校准,但是没太想明白具体是怎么回事,等看到更具体的使用的时候再说吧
- PS:这里和后面的可视化,应该都是涉及到Qt编程了的?因为以前没接触过,所以在vscode中也没配好,很多函数也看不到定义啥的,所以这里真的只是单纯看了下每个可视化的功能,没有研究具体是怎么编写的。不过总的来说其实每个可视化执行的也都是ROS的话题订阅发布、服务发布这些,rviz可视化只不过是在rviz的界面上增加了这些属性
tier4_control_rviz_plugin(可视化+1)
也是rviz可视化的一些东西,这个主要是车辆的人为控制的一些东西,加了之后就是分别设置速度以及控制转盘的旋钮来控制车辆的运动,当然具体的实现肯定也是通过话题的发布来实现车辆的运动的,在示例里面添加着试了一下,开起来还挺麻烦的
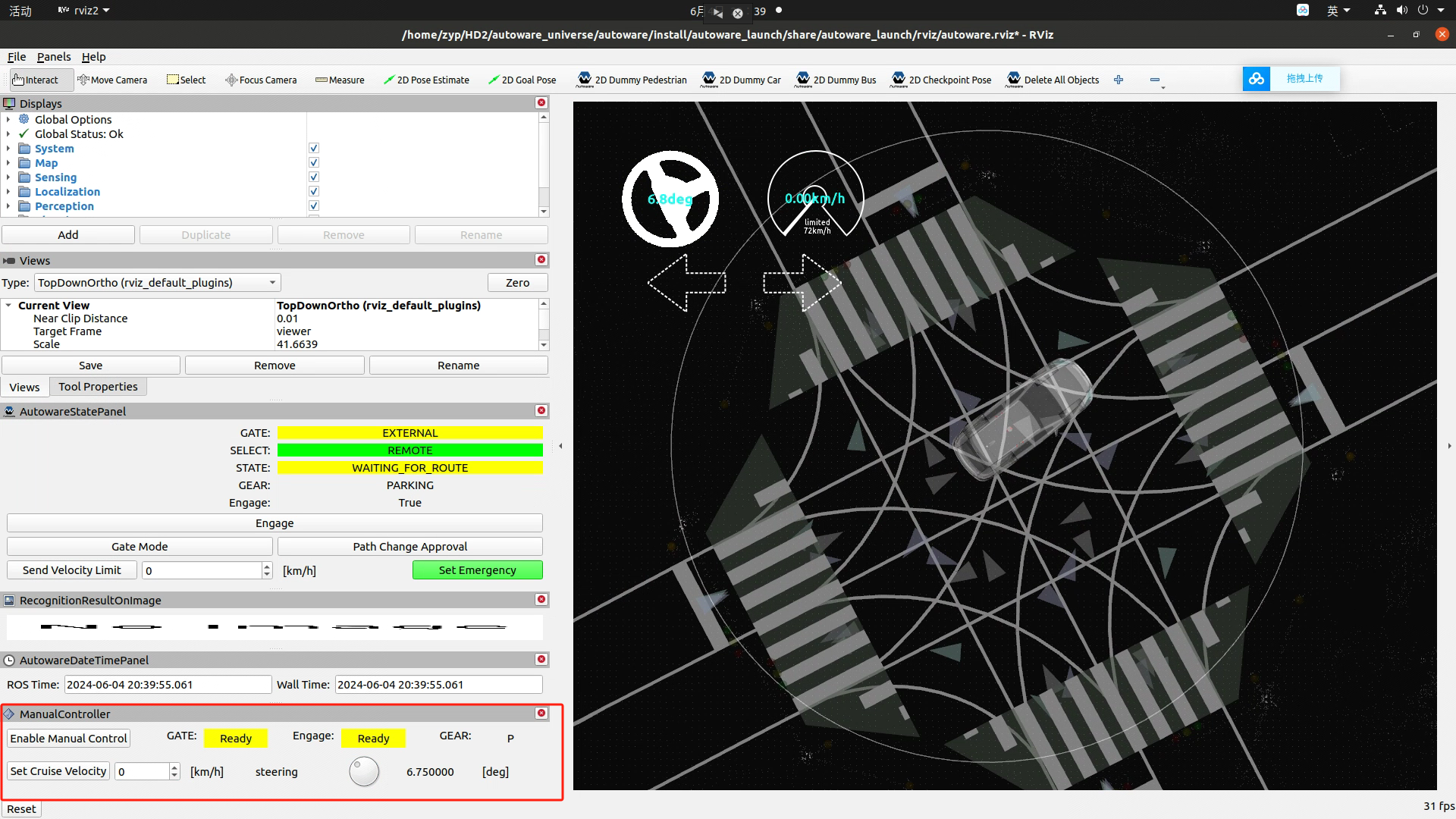
这里目前好像是只对Ackermann一种模型有效?gear_cmd应该是指对发动机的控制(直接相关的就是加速度),对应有三种,行驶(DRIVE)、反向(REVERSE)以及停泊(PARK)
tier4_datetime_rviz_plugin(还是可视化)
好像就是显示日期和时间的一个panel,没有什么特殊的用途,显示的一共是两个时间
- ROS time
- WALL time:这个指的应该是程序从开始执行到结束,也就是当前时刻所花费的时间
tier4_debug_rviz_plugin(继续可视化)
这个也没完全看懂,看起来是显示那种占比百分图的可视化部分
tier4_debug_tools(调试工具)
这里面也是一些可能会用到的工具,这里面
有一些用python写的,比如tf2pose,就是根据对tf_buffer的监听,把得到的transform转换成Pose
至于用C++写的这个lateral_error_publisher,示意图表示的比较清楚

这里还有个stop_reason,这个可能就是字面意思?导致车辆停止的原因?还不是很确定
tier4_localization_rviz_plugin(又来可视化,定位轨迹)
这个是历史定位轨迹的可视化
tier4_perception_rviz_plugin(感知可视化)
这里主要是把感知检测到的各种物体进行可视化,有车辆位置(car_pose)、交互式的物体(interactive_object)、行人(pedestrian_pose),还有一个是对鼠标事件的捕捉,通过鼠标获取到点(get_point_from_mouse)。
tier4_planning_rviz_plugin(路径规划的可视化)
控制相关部分的可视化,这里再重新来梳理两个概念
Path:路径,从起点到终点,避开障碍物且遵循路线规划的路径
Trajectory:轨迹,包含了动力学信息,感觉是结合了动态信息的,还包括了时间属性
tier4_screen_capture_rviz_plugin(屏幕抓取)
看了下应该就是对屏幕进行的截屏处理,具体的抓取函数应该是这个
void AutowareScreenCapturePanel::onClickScreenCapture()
{
const std::string time_text = "capture/" + ros_time_label_->text().toStdString();
getDisplayContext()->getViewManager()->getRenderPanel()->getRenderWindow()->captureScreenShot(
time_text + ".png");
}
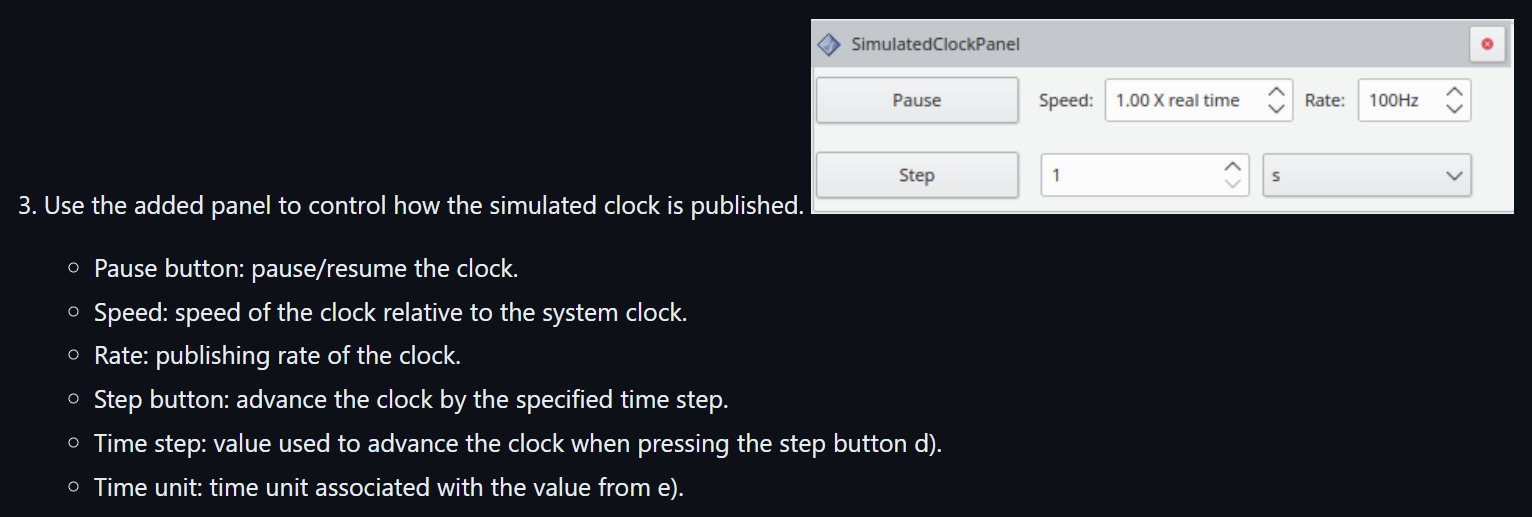
tier4_simulated_clock_rviz_plugin(时间控制)
主要作用就是在界面控制时钟暂停、加速等等
tier4_state_rviz_plugin(状态展示)
这个对应的就是左侧显示车辆状态的那部分,这里我的分支是galatic分支的代码,最新的代码这个界面以及一些名字应该是发生了改变的,不过目的没什么区别
旧版界面:

新的界面:

tier4_traffic_light_rviz_plugin(红绿灯)
这部分是负责交通信号灯的,之前在官方demo教程中,是有对这个Panel的介绍的,包括如何添加,如何设置属性等等,所以这个部分就是这里的具体实现。红绿灯应该是从矢量地图中提取到的:
void TrafficLightPublishPanel::onVectorMap(const HADMapBin::ConstSharedPtr msg)
{
if (received_vector_map_) return;
// NOTE: examples from map_loader/lanelet2_map_visualization_node.cpp
// 解析lanelet地图
lanelet::LaneletMapPtr lanelet_map(new lanelet::LaneletMap);
lanelet::utils::conversion::fromBinMsg(*msg, lanelet_map);
lanelet::ConstLanelets all_lanelets = lanelet::utils::query::laneletLayer(lanelet_map);
// 获取所有交通灯
std::vector<lanelet::TrafficLightConstPtr> tl_reg_elems =
lanelet::utils::query::trafficLights(all_lanelets);
std::string info = "Fetching traffic lights :";
std::string delim = " ";
// 获取所有交通灯的id并且更新log
for (auto && tl_reg_elem_ptr : tl_reg_elems) {
for (auto && traffic_light : tl_reg_elem_ptr->trafficLights()) {
auto id = static_cast<int>(traffic_light.id());
info += (std::exchange(delim, ", ") + std::to_string(id));
traffic_light_ids_.insert(id);
}
}
RCLCPP_INFO_STREAM(raw_node_->get_logger(), info);
received_vector_map_ = true;
// 更新UI组件,加到下拉列表里
for (auto && traffic_light_id : traffic_light_ids_) {
traffic_light_id_input_->addItem(QString::fromStdString(std::to_string(traffic_light_id)));
}
}
tier4_vehicle_rviz_plugin(车辆行驶信息)
这个就是在网格地图上显示出来的车辆的速度、转向的那些信息。然后这个是覆盖在地图上的

time_utils(时间消息)
这个部分主要是时间信息和msg的一个连接,然后这里也有一个stopwatch的计时,不过只通过measure得到了耗费时间
然后通过to_message和from_message实现了时间与msg的一个连接
trtexec_vendor(TensorRT可执行文件)
这里主要是一个脚本,目的就是找到trtexec可执行文件,并把这个路径添加到环境变量中
这个文件看了一下好像是能够把ONNX文件之类的转换成engine引擎文件,具体的使用可以参考一下两篇文章
tvm_utility(端到端深度学习编译器)
首先关于TVM,这个概念也是第一次接触:
Apache TVM 是开源的机器学习编译器框架,用于 CPU、GPU 和机器学习加速器。它的目标是让机器学习工程师在任何硬件后端优化和高效运行计算。本教程的目的是通过定义和演示关键概念,引导读者了解 TVM 的所有主要特性。新用户应该能够从头到尾地学习本教程,并能够操作 TVM 进行自动模型优化,同时对 TVM 体系结构及其工作原理有基本的了解。
关于深度学习、机器学习的东西,因为现在没什么基础,所以赞数跳过,后边稍微了解一下原理后再仔细来看
这里我的理解是主要的执行步骤在这个schedule里面:
TVMArrayContainerVector schedule(const TVMArrayContainerVector & input)
{
// Set input(s)
for (uint32_t index = 0; index < input.size(); ++index) {
if (input[index].getArray() == nullptr) {
throw std::runtime_error("input variable is null");
}
set_input(config_.network_inputs[index].first.c_str(), input[index].getArray());
}
// Execute the inference
execute();
// Get output(s)
for (uint32_t index = 0; index < output_.size(); ++index) {
if (output_[index].getArray() == nullptr) {
throw std::runtime_error("output variable is null");
}
get_output(index, output_[index].getArray());
}
return output_;
}
关于YOLOv2 Tiny Example Pipeline,这里本来想跑了一下这个示例来体验了一下这里究竟做了什么工作。不过我发现官方所说的这个只适合他最新的代码,galatic分支下的代码好像是不支持这个示例的?因为都没有launch文件,试图直接用最新的代码编译也没搞明白。。所以这里就暂时放弃了,单独跑了一下生成的gtest

expected_output[0] = 0.356000;
expected_output[1] = 0.763036;
expected_output[2] = 0.402512;
expected_output[3] = 0.300442;
expected_output[4] = 0.612652;
expected_output[5] = 0.581861;
expected_output[6] = 0.421924;
expected_output[7] = 0.456947;
expected_output[8] = 0.378341;
expected_output[9] = 0.806586;
expected_output[10] = 0.575851;
把输出转为float打印出来了,没太想出来具体输出到底是什么。根据图片来看应该至少能检测到狗和车吧?输出了11个数字也没太看明白。后面又去看了下最新的代码里的output,和这里是一样的,也是11个数字。我怀疑可能是对检测到的物体的概率?比如9对应的可能就是狗,然后1可能对应的就是车

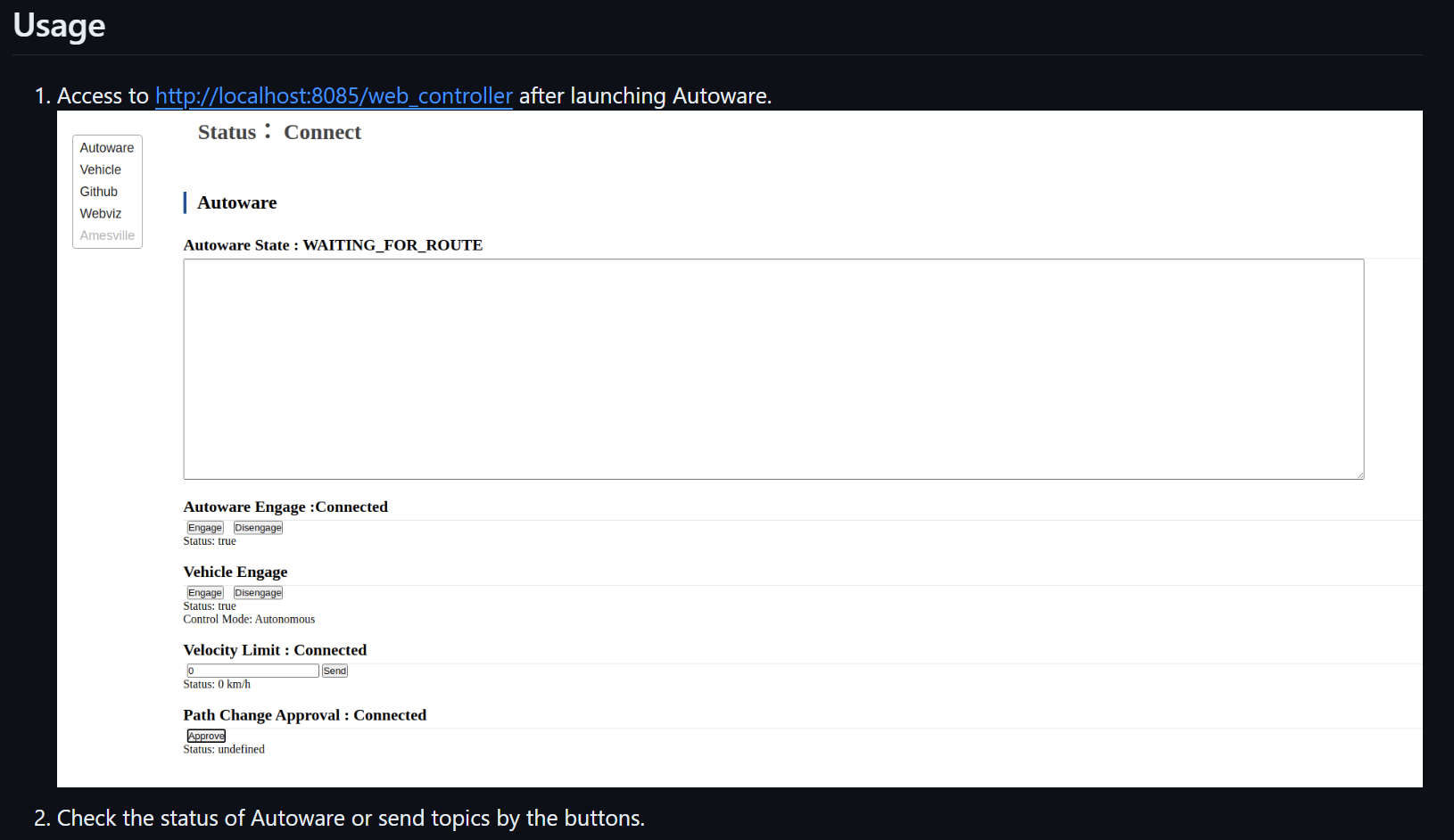
web_controller(网络连接)
这里都是用js写的了,这就看不懂了,不过总体的作用就是可以打开一个网页来改变看到Autoware的状态以及发送消息
总结
到此,autoware的第一个模块common应该就算是看完了,这个模块更多的是一些基础函数、基础类(多边形)以及可视化的部分,所以一些不太涉及原理的代码大多看了一遍,也没有仔细思考怎么实现的就带过了。很多函数可能也没有搞得特别清楚,想着还是后边如果有用到,再边用边看具体的函数,这样可能会更利于理解一些。

















 946
946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









