









一、霍尔编码器
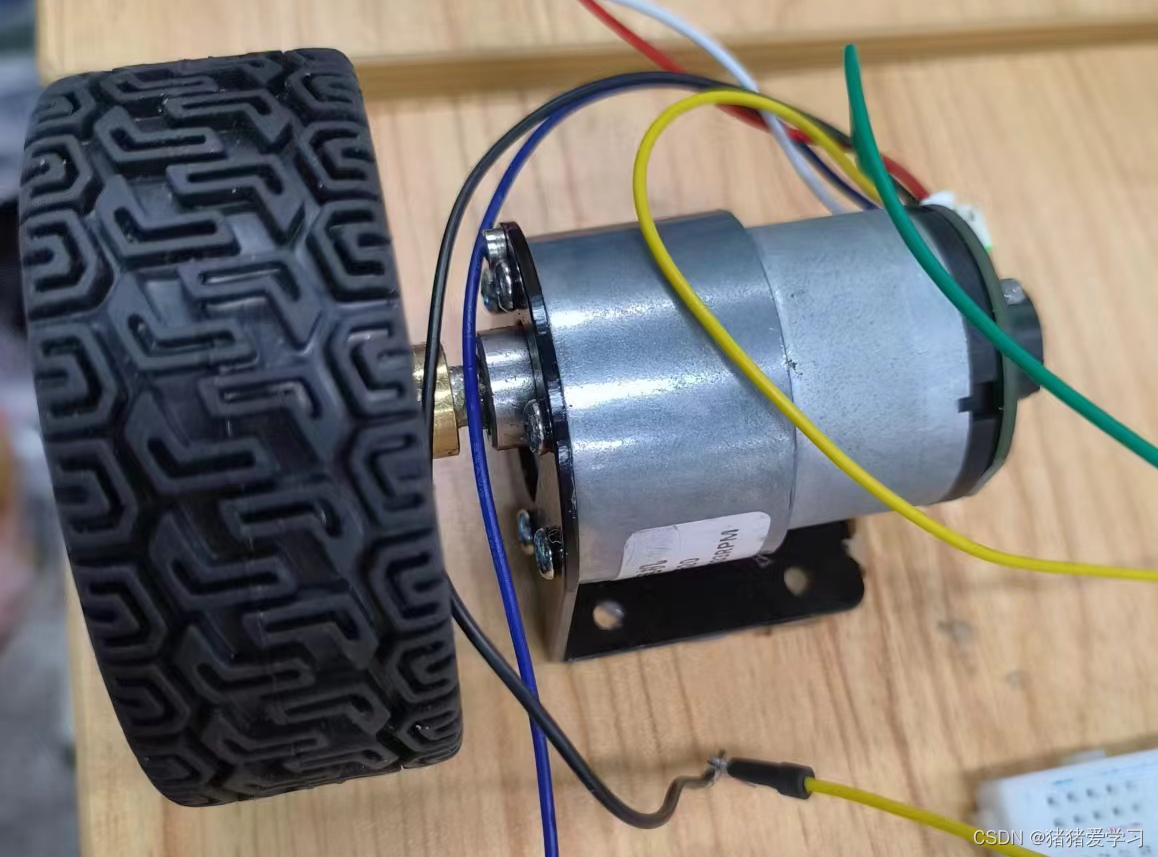
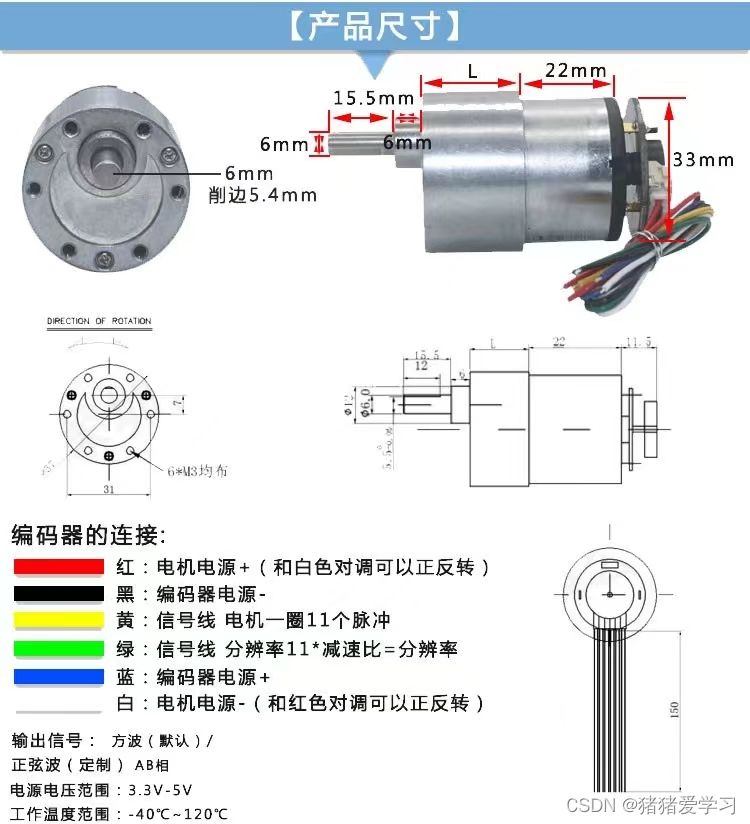
这里博主采用的是JGB37-520直流减速电机 ,霍尔编码器(磁式)。
1.什么是编码器
编码器是把角位移或直线位移转换成电信号的一种装置。编码器按照工作原理,可以分为增量式编码器和绝对式编码器
绝对式编码器的每一个位置对应一个确定的数字码(二进制数)。
增量式编码器就是每转过单位的角度就发出一个脉冲信号。
从编码器检测原理上来分,还可以分为光学式、磁式、感应式、电容式。我们常见的是光电编码器(光学式)和我们要介绍的主角霍尔编码器(磁式)。一般来说光电编码器是霍尔编码器精度的几十倍。
2.编码器的作用。
了解了什么是编码器,那么我们用编码器有什么实际作用呢?通常我们会使用编码器来检测电机的转速和旋转方向。那我们常用的控制算法PID算法来说,PID算法是为了实现闭环控制,要想实现闭环控制,就需要有一个反馈。我们的编码器测得的转速就可以作为反馈,搭配PID算法,实现转速的闭环控制。
3.霍尔编码器的工作原理。
其实从上面的介绍就能大概了解到编码器的工作原理。我们这次主要介绍对象是霍尔编码器。霍尔编码器由码盘和霍尔元件组成。霍尔码盘与电机主轴同轴,码盘上等分的分布有多个磁极,电机转动时,霍尔元件会输出若干个脉冲信号,我们正是利用这些脉冲信号实现电机的测速和电机转向的判断。
4.霍尔编码器的线数。
什么是霍尔编码器的线数?转动一圈我们会产生几个脉冲,取决于编码器的线数。比如我们的霍尔编码器线数为11。那么霍尔编码器的码盘旋转一圈,会产生11个脉冲。
5.霍尔编码器判断旋转方向和转速
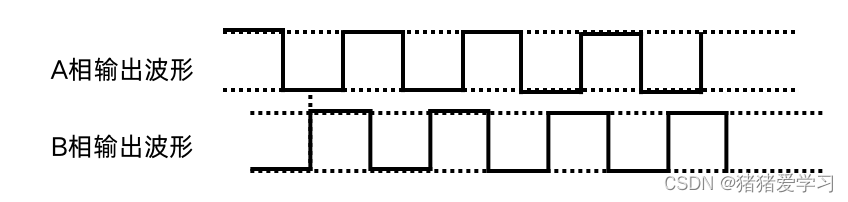
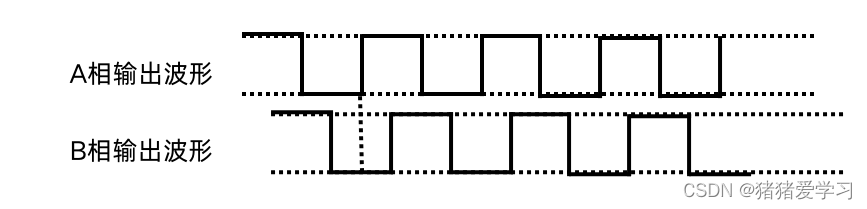
1.方向:通过A相出现脉冲时检测B相电平来判断电机旋转方向。(或者B相出现检测A相)
A检测到上升沿脉冲时(由低电平变为高电平),B为高电平,正转;
A检测到上升沿脉冲时(由低电平变为高电平),B为低电平,反转;当然,正转或者反转是可以相互变换的,A由低电平变为高电平,B的高低电平可以决定电机正反转
2.转速:通过检测单位时间内产生的脉冲数来确定电机转速。
为什么可以这么做?因为电机转动一圈产生的脉冲数是确定的。比如我们有一个减速比为1:30的减速电机,霍尔编码器的线数为11。那么霍尔码盘旋转一圈,产生11个脉冲,霍尔码盘旋转30圈,电机主轴旋转一圈。综上所述,电机主轴旋转一圈会产生11 * 30 = 330个脉冲。注意,这里是只检测A相的上升沿脉冲,电机旋转一圈有330个脉冲。
有的小伙伴可能会疑问,是转一圈A和B一共产生330个脉冲,还是A和B都产生330个脉冲?答案是后者。
接下来我们只需要检测单位时间内A相或者B相输出的脉冲数,就可以计算电机转速了。
二、测速程序设计
1.接线图
2.代码
from machine import Pin
import time
# 定义编码器A相和B相的引脚
encoder_a = Pin(17, Pin.IN, Pin.PULL_UP)
encoder_b = Pin(5, Pin.IN, Pin.PULL_UP)
# 用于记录编码器状态的变量
last_a_state = encoder_a.value()
position = 0
# 编码器中断处理函数(仅针对A相的上升沿)
def encoder_interrupt(pin):
global last_a_state, position
current_a_state = encoder_a.value()
current_b_state = encoder_b.value()
# 如果A相状态从低到高变化(上升沿)
if current_a_state == 1 and last_a_state == 0:
# 根据A相上升沿时B相的状态确定方向
if current_b_state: # B相为高,正方向
position += 1
else: # B相为低,反方向
position -= 1
# 打印位置和方向(可选)
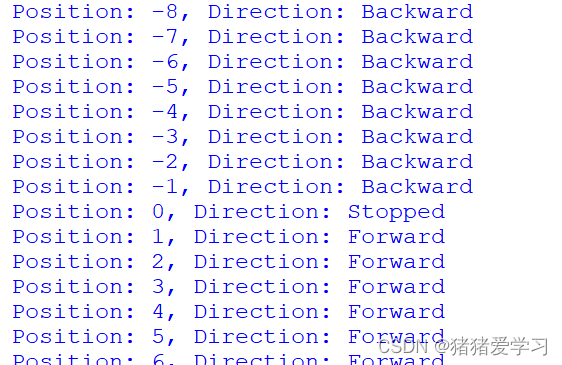
print("Position: {}, Direction: {}".format(position, "Forward" if position > 0 else "Backward" if position < 0 else "Stopped"))
last_a_state=0
# 设置引脚中断(仅针对A相的上升沿)
encoder_a.irq(trigger=Pin.IRQ_RISING, handler=encoder_interrupt)
# 注意:我们不再为encoder_b设置中断,因为它在这个例子中不被直接使用
# 主循环(可以在这里添加其他任务)
while True:
# 在这里可以添加其他逻辑或任务
time.sleep_ms(100) # 休眠以减少CPU使用率
3.测试结果
当我们运行代码,旋转轮胎就可以看到输出编码器的数据
4.结论
正交编码器通常有两个输出,(它们之间的相位差为90度。这种设计使得通过同时监测这两个输出信号,可以准确地确定编码器的旋转方向和步数。
在代码中,选择仅使用A相的上升沿(从低电平到高电平的变化)来触发中断,并根据B相的信号状态来确定旋转方向。
5.以下是该代码的主要原理
- 引脚配置:
encoder_a和encoder_b分别连接到编码器的A相和B相输出。它们都被配置为输入模式,并启用内部上拉电阻。- 中断设置:仅为
encoder_a设置上升沿中断。当A相从低电平变为高电平时,会触发中断并执行encoder_interrupt函数。- 中断处理:在
encoder_interrupt函数中,首先读取A相和B相的当前状态。然后,检查A相是否从低电平变为高电平(即上升沿)。如果是,则根据B相的状态来确定旋转方向:
- 如果B相为高电平,则编码器向正方向旋转,位置计数加1。
- 如果B相为低电平,则编码器向反方向旋转,位置计数减1。
- 位置和方向输出:在每次中断处理后,都会打印当前的位置和方向。注意,由于位置计数是整数,因此当计数为0时,表示编码器已停止或处于初始位置。
- 主循环:主循环中的
time.sleep_ms(100)用于减少CPU的使用率。您可以在此处添加其他任务或逻辑。
















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











