









一、前文
电机控制器(MotorController)在MicroPython中的实现与解读
在嵌入式系统开发中,使用MicroPython控制电机是一种常见的方法。本文将介绍一个使用MicroPython编写的MotorController类,用于控制两个电机(每个电机有两个控制引脚和一个PWM引脚)。我们将对代码进行详细解读,并探讨其工作原理。
在嵌入式项目中,经常需要控制电机来实现各种功能。ESP32是一款功能强大的微控制器,它支持MicroPython,这使得我们可以使用Python语言来编写控制逻辑。结合L298N电机驱动器,我们可以轻松控制直流电机或步进电机。
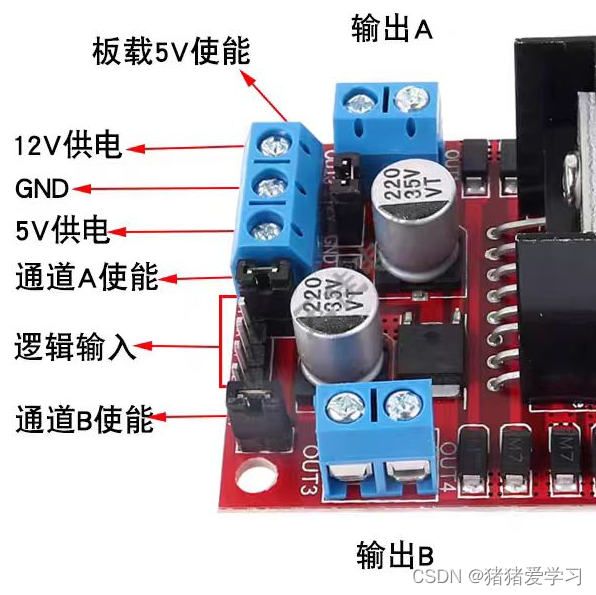
L298N电机驱动器简介
L298N是一款常用的电机驱动器,可以驱动两个直流电机或一个步进电机。它提供了两个H桥电路,每个电路可以独立控制一个电机的正转、反转和停止。
使用Micro Python编写代码
现在,我们可以使用MicroPython来编写代码,控制ESP32与L298N的交互。
以下是一个简单的代码示例,展示了如何使用ESP32的MicroPython来驱动L298N,从而控制两个电机:
二、代码
motor_control.py代码
# motor_control.py
from machine import Pin, PWM
class MotorController:
def __init__(self, pwm_pin1, in1_pin, in2_pin,pwm_pin2, in3_pin, in4_pin):
self.pwm1 = PWM(Pin(pwm_pin1))
self.pwm2 = PWM(Pin(pwm_pin2))
self.pwm1.freq(1000) # 设置PWM频率为1kHz
self.pwm2.freq(1000)
self.in1 = Pin(in1_pin, Pin.OUT)
self.in2 = Pin(in2_pin, Pin.OUT)
self.in3 = Pin(in3_pin, Pin.OUT)
self.in4 = Pin(in4_pin, Pin.OUT)
def forward(self, duty=1023):
self.in1.value(1)
self.in2.value(0)
self.pwm1.duty(duty)
def backward(self, duty=1023):
self.in1.value(0)
self.in2.value(1)
self.pwm1.duty(duty)
def stop(self):
self.pwm1.duty(0)
def forward2(self, duty=1023):
self.in3.value(1)
self.in4.value(0)
self.pwm2.duty(duty)
def backward2(self, duty=1023):
self.in3.value(0)
self.in4.value(1)
self.pwm2.duty(duty)
def stop2(self):
self.pwm2.duty(0) 使用代码
from motor_control import MotorController
import time
motor2 = MotorController(4, 2, 0, 12, 14, 13)
# 控制电机1正转,然后反转
motor2.forward(duty=512) # 以50%的速度正转
time.sleep(2) # 让电机转2秒
motor2.backward(duty=1023) # 以100%的速度反转
time.sleep(2) # 让电机转2秒
# 停止电机2
motor2.stop()
# 控制电机2正转,然后反转
motor2.forward2(duty=512) # 以50%的速度正转
time.sleep(2) # 让电机转2秒
motor2.backward2(duty=1023) # 以100%的速度反转
time.sleep(2) # 让电机转2秒
# 停止电机2
motor2.stop2() 二、连线方式
首先,我们需要将ESP32与L298N正确连接。通常,我们会使用ESP32的GPIO引脚来控制L298N的输入引脚,并使用PWM信号来控制电机的速度。
以下是一个典型的连接示例:
- ESP32的GPIO引脚连接到L298N的IN1(2)、IN2(0)、IN3(14)、IN4(13)引脚,用于控制电机的正转、反转和停止。
- ESP32的PWM引脚连接到L298N的ENA(4)、ENB(12)引脚,用于控制电机的速度。

三、原理
该代码实现了一个名为MotorController的类,用于控制两个电机的运动。每个电机有两个方向控制引脚(in1和in2用于第一个电机,in3和in4用于第二个电机)和一个PWM(脉宽调制)引脚(pwm1用于第一个电机,pwm2用于第二个电机)。PWM引脚用于控制电机的速度,而方向控制引脚则决定电机的旋转方向。
四、总结
这个MotorController类提供了一个简单而灵活的方式来控制两个电机。通过调用不同的方法,我们可以轻松地实现电机的正转、反转和停止。此外,我们还可以根据需要调整PWM占空比来控制电机的速度。
在实际应用中,我们可以根据硬件连接和具体需求来修改这个类,以适应不同的场景。例如,我们可以添加更多的方法来实现更复杂的功能,如电机的刹车、微调等。同时,我们还可以通过调整PWM频率和占空比的精度来优化电机的控制效果。


















 1647
1647

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











