






图像色彩空间HSV
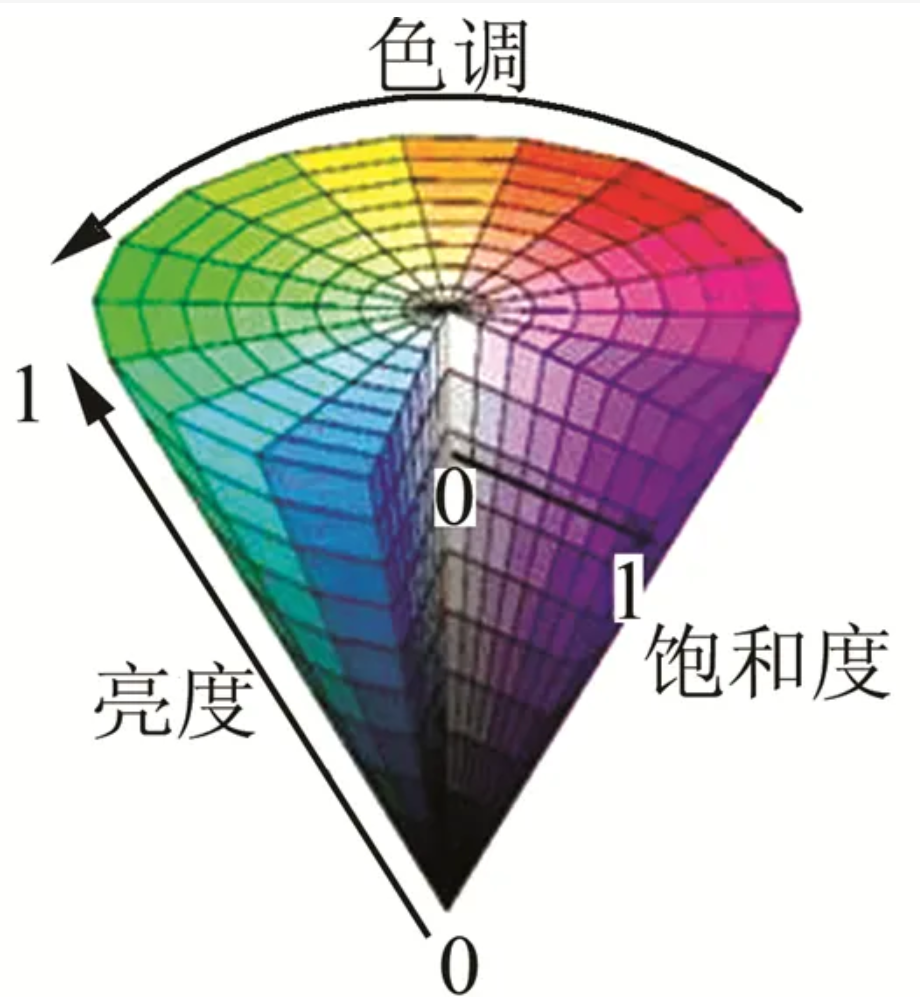
HSV(Hue, Saturation, Value)是根据颜色的直观特性由A. R. Smith在1978年创建的一种颜色空间, 也称六角锥体模型(Hexcone Model)。这个模型中颜色的参数分别是:色调(H),饱和度(S),亮度(V)。
RGB和CMY颜色模型都是面向硬件的,而HSV(Hue Saturation Value)颜色模型是面向用户的。
HSV模型的三维表示从RGB立方体演化而来。设想从RGB沿立方体对角线的白色顶点向黑色顶点观察,就可以看到立方体的六边形外形。六边形边界表示色彩,水平轴表示纯度,明度沿垂直轴测量。
OpenCV中HSV各个分量的取值范围
色调 H : 0 ~ 180
用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°, 蓝色为240°。它们的补色是:黄色为60°,青色为180°, 品红为300°;
饱和度 S :0 ~ 255
饱和度S表示颜色接近光谱色的程度。一种颜色,可以看成是某种光谱色与白色混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。光谱色的白光成分为0,饱和度达到最高。通常取值范围为0%~100%,值越大,颜色越饱和。
亮度 V : 0 ~ 255
亮度表示颜色明亮的程度,对于光源色,亮度值与发光体的光亮度有关;对于物体色,此值和物体的透射比或反射比有关。通常取值范围为0%(黑)到100%(白)。
获取某个特定颜色举例:
import cv2
import numpy as np
def empty(a):
pass
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8) #uint8表示范围[0,255]的整数
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
path ="Resources/lambo.jpeg"
cv2.namedWindow("TrackBars")
cv2.resizeWindow("TrackBars",640,240)
cv2.createTrackbar("Hue Min","TrackBars",0,180,empty)
cv2.createTrackbar("Hue Max","TrackBars",180,180,empty)
cv2.createTrackbar("Sat Min","TrackBars",0,255,empty)
cv2.createTrackbar("Sat Max","TrackBars",255,255,empty)
cv2.createTrackbar("Val Min","TrackBars",0,255,empty)
cv2.createTrackbar("Val Max","TrackBars",255,255,empty)
while True:
img = cv2.imread(path)
imgHSV = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
h_min = cv2.getTrackbarPos("Hue Min","TrackBars")
h_max = cv2.getTrackbarPos("Hue Max", "TrackBars")
s_min = cv2.getTrackbarPos("Sat Min", "TrackBars")
s_max = cv2.getTrackbarPos("Sat Max", "TrackBars")
v_min = cv2.getTrackbarPos("Val Min", "TrackBars")
v_max = cv2.getTrackbarPos("Val Max", "TrackBars")
print(h_min,h_max,s_min,s_max,v_min,v_max) #获取了Hue,sat,val的值以后,我们要对这些值进行过滤
lower = np.array([h_min,s_min,v_min])
upper = np.array([h_max,s_max,v_max])
mask = cv2.inRange(imgHSV,lower,upper)
imgResult = cv2.bitwise_and(img,img,mask=mask)
# cv2.imshow("original",img)
# cv2.imshow("HSV",imgHSV)
# cv2.imshow("mask",mask)
# cv2.imshow("result",imgResult)
# cv2.waitKey(1)
imgStack = stackImages(0.6,([img,imgHSV],[mask,imgResult]))
cv2.imshow("stacked Images", imgStack)
cv2.waitKey(1)
],[mask,imgResult]))
cv2.imshow(“stacked Images”, imgStack)
cv2.waitKey(1)
















 3736
3736











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









