







 本文详细描述了整流电路的拓扑结构,特别是使用IGBT的半桥结构,并介绍了双闭环控制器的设计,包括电流内环和电压外环的控制策略。着重讨论了PI控制参数的整定,针对电流内环分别采用I型和II型系统设计,以及电压外环的抗扰性能优化。
本文详细描述了整流电路的拓扑结构,特别是使用IGBT的半桥结构,并介绍了双闭环控制器的设计,包括电流内环和电压外环的控制策略。着重讨论了PI控制参数的整定,针对电流内环分别采用I型和II型系统设计,以及电压外环的抗扰性能优化。
1. 整流侧电路拓扑图
整流电路由交流侧电源、线路电阻、线路电抗、整流器、滤波电容以及负载组成。整体电路图如图1所示。
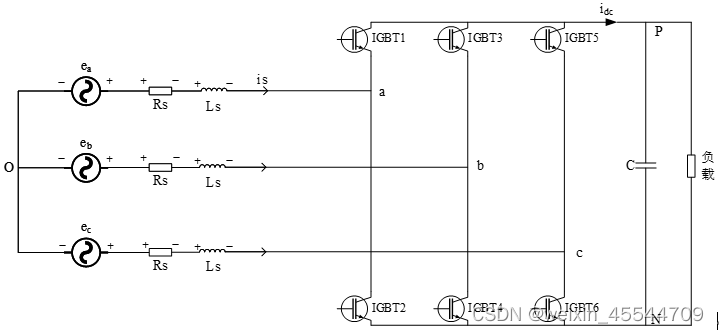
图 1 整流电路拓扑图
其中,IGBT的开关状函数如下式所示

根据图 1 列出 KVL 公式如下,电流的正方向是从左到右
对于每一相的IGBT相当于是半桥结构,对于单相而言,是遵循DC-DC变换器的基本规律。基于此,可令

![]()
将公式(3)带入公式(4)中可得 ![]()
整理得: ![]()
对直流侧分析 ![]()
直流电容值为
![]()
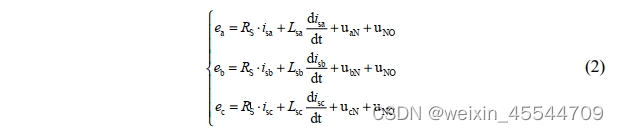
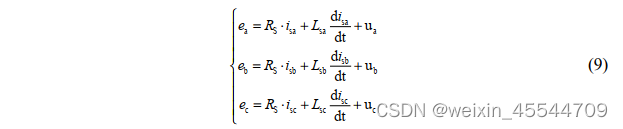
再令uaN+uNO=uao=ua,同理可得到ub、uc
经过替换,公式(2)可以变成
2. 双闭环控制器的设计
2.1 abc to dq
令变换系数为 B
根据数学微分计算可知
![]()
将上式整理得到
![]()
同理,
![]()
将上式整理得到
![]()
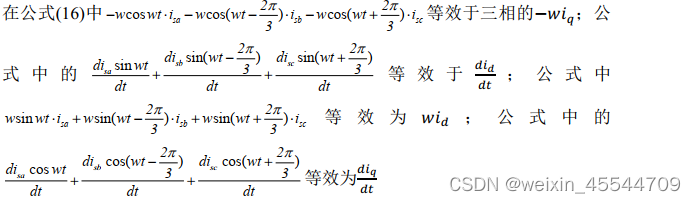
利用公式(10)、 (12)和(14)计算得到
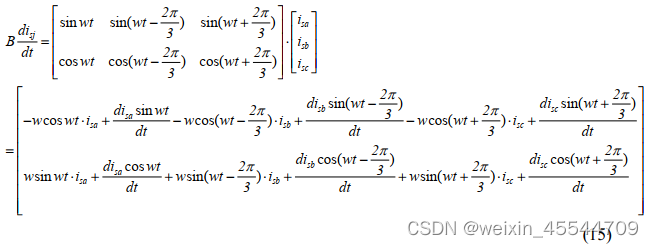
将公式(15)整理得到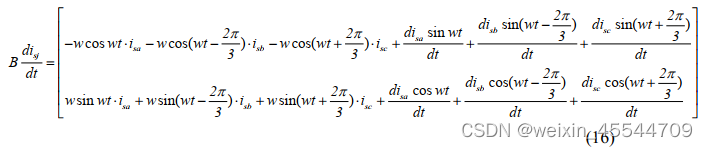
由于 sinwt 是属于 d 轴上的量, coswt 是属于 q 轴上的量,所以通过观察上式不
难发现, d 和 q 轴之间存在耦合关系。
即

再将两侧乘以𝐿𝑠

将结合公式(18)和公式(9)可得

将上式拆开可得到:

再对公式(20)进行拉氏变换可得(微信形式需要变为 S):

则 PWM 整流器的输入输出模型为
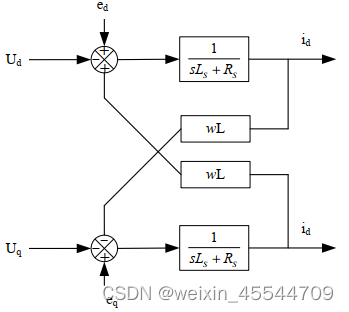
图 2 PWM 整流器的输入输出模型
2.2 电流内环的设计
利用公式进行变量替换
若将𝑉𝑑 = (𝑆𝐿𝑆 + 𝑅𝑠)𝑖𝑑形式变换为
![]()
则此公式的控制框图为
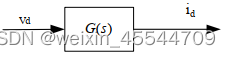
图 3 电流和电压的关系框图
在控制环中加入 PI 控制,可得

图 4 加入 PI 控制的电压和电流控制框图
图中, 𝐺𝑐(𝑠) = 𝐾𝑝 + 𝐾i/𝑆,从图中可得,

结合公式(23)和公式(25)可以得到

然后根据公式(26)可以设计出控制器的框图为
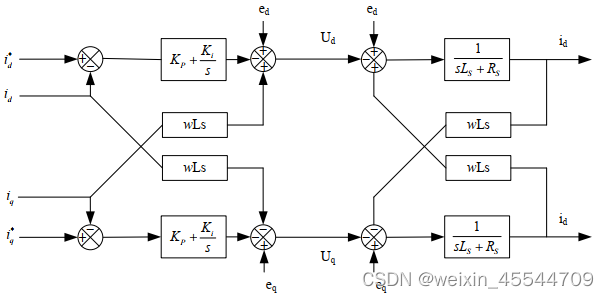
图 5 控制电路图
由图 5 可知,解耦过程如下;
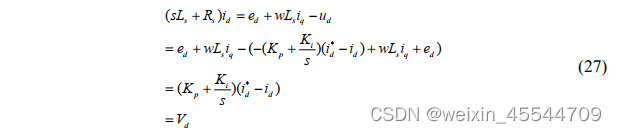
通过上式可以看出,![]() 前后被消掉了,从而达到了解耦的目的,
前后被消掉了,从而达到了解耦的目的,![]() 解耦亦是如此。 图 5 中左侧即是电流内环的控制结构。
解耦亦是如此。 图 5 中左侧即是电流内环的控制结构。
2.3 电压外环的控制设计
电压外环的控制是为了生成电流的参考值, 将直流测电压实际值与参考值进行对比,并经过 PI 控制之后得到的参考值, 其框图如图所示:
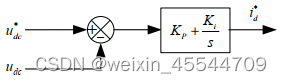
图 6 电压外环控制框图
3 双闭环 PI 控制参数的整定
3.1 电流内环的整定
电流内环可以按照 I 型系统和 II 型系统进行整定, I 型系统为
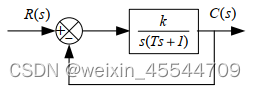
图7 I 型系统框图
II 型系统框图
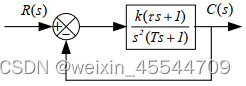
图8 II 型系统框图
下面讨论三相 VSR 电流内环结构的参数的设计,要考虑电流内环的信号夏阳的延迟和 PWM 控制的小惯性特性,已解耦的电流内环控制结构图如图所示。
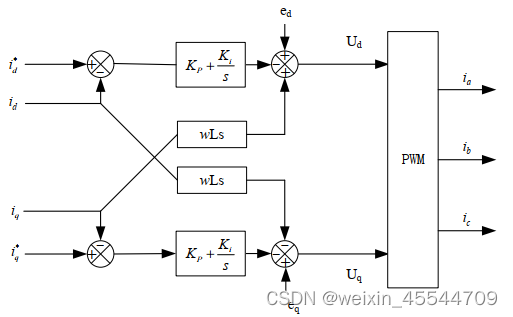
图 9 已解耦的电流内环控制结构图
上图中的电流环负反馈图为

图 10 iq 电流环结构图
在图 10 中 Ts 为电流内环的采样周期(即 PWM 的开关周期), KPWM为桥路 PWM等效增援,为简化分析,暂不考虑𝑒𝑞的扰动,且将 PI 调节器传递函数写成零极点的形式,即
![]()
将小时间常数 Ts/2、 Ts 合并,得到简化的电流内环结构,结构如图所示

图 11 无 eq 扰动时的 iq 电流内环简化结构图
3.2 电流调节器的设计
3.2.1设计方案 1——按典型 I 阶系统进行设计电路
当考虑电流内环需获取较快的电流跟随性时,可按照 I 型系统设计电流调节器, 从图 11 中可以看出,只需要以 PI 调节器零点抵消掉电流控制对象传递函数的极点即可,即𝜏𝑖 = 𝐿/𝑅,校正后,可得电流的开环传递函数为![]()
由典型的 I 型系统参数整定关系,当取系统阻尼比𝜉 = 0.707时,有
求解得

公式(31)和(32)即为电流内环的比例积分系数值
另外,电流内环的闭环传递函数为

由于开关频率足够高,则 Ts 也会足够小, 由于𝑠2的系数远小于 s 项的系数, 从而![]()
这一项可以忽略不计,

将公式(31)带入(33)中可得,得到电流内环的等效传递函数为

上式表明,当电流内环按照典型 I 型系统进行整定时,电流内环可近似为等效成一个惯性环节,其惯性时间常数为3𝑇𝑠,显然,开关频率足够高时候,电流内环具有较快的动态响应。
当闭环控制系统的闭环增益减少至-3dB 或者其相位移为-45°时,该点频率可定义为闭环系统频带宽度𝑓𝑏。实际上,除了一阶惯性环节以外,控制系统-3dB个相位移-45°频率点并非在一个频率点上,这时期带宽应取;两频率点中较低者。对于典型 I 阶系统设计的三相 SVR 电流内环系统,由于电流内环可等效成一阶惯性环节,因而电流内环的频带宽度𝑓𝑏𝑖为

式中: 𝑓𝑎为电流内环 PWM 的调制频率
对于阻尼比为𝜉 = 0.707的典型 I 阶系统的动态指标见表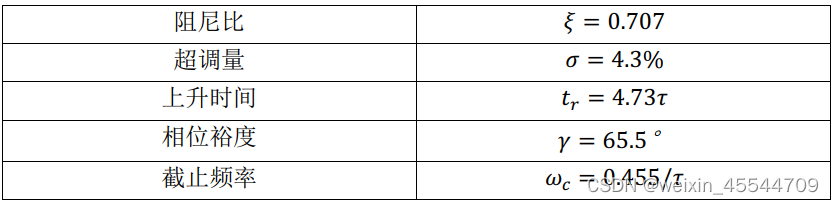
表中, 𝜏为与典型 I 型系统开环传递函数节点对应的时间常数,且𝜏 = 1.5𝑇,显然电流内环具有良好的跟随性
I 型电流内环设计时,并没有考虑电网电动势𝑒𝑞扰动对输出的影响,当考虑𝑒𝑞的扰动时, 𝑒𝑞电流内环简化结构如图所示,
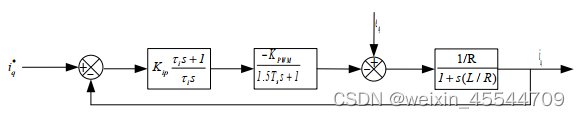
图 12 𝑒𝑞的扰动时电流内环简化结构
为讨论电流内环的简化结构,令𝑖𝑞∗ = 0,则由上图可知, 其输出电流变化量为
式中, W s ci ( ) 为电流内环等效闭环传递函数
考虑阶跃扰动,则
E qm为阶跃扰动幅值
将公式(38)代入到(37),且令阻尼比为𝜉 = 0.707,即![]() ,
,
这样

利用部分分式法分解式(39),再求拉式反变换,可得阶跃扰动时,输出变化量![]() 的时域表达式,即
的时域表达式,即

式中, m 为电流内环结构中, 𝑒𝑞扰动点两边传递函数中的市价常数之比,即![]() 。显然, 𝜏𝑖 = 𝐿/𝑅 > 1.5,即 m<1,若以∆𝑖𝑞𝑏 = 𝐸𝑚/(2𝑅)为基准值,计算出∆𝑖𝑞𝑚𝑎𝑥/∆𝑖𝑞𝑏其主要结果如表所示
。显然, 𝜏𝑖 = 𝐿/𝑅 > 1.5,即 m<1,若以∆𝑖𝑞𝑏 = 𝐸𝑚/(2𝑅)为基准值,计算出∆𝑖𝑞𝑚𝑎𝑥/∆𝑖𝑞𝑏其主要结果如表所示
表 1 𝜉 = 0.707时电流内环抗扰性指标
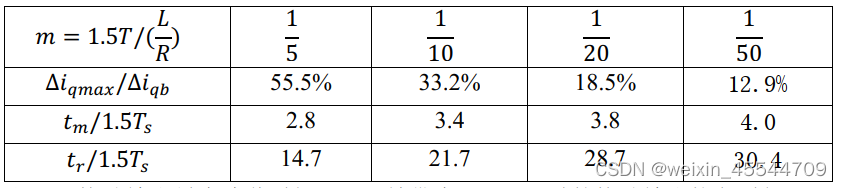
注: tm扰动输出最大降落时间; 𝑡𝑟误差带为±5%Δ𝑖𝑝ℎ时的扰动输出恢复时间
从表 1 中数值课看出,当电流内环结构中𝑒𝑞扰动点两侧对象时间常数相差较大时,动态降落减少,但恢复时间较长。三相 VSR 电流内环控制正属于这种情况,因此电流内环按典型 I 型系统设计时,虽然电流控制具有较好的跟随性能,但系统抗扰能力较差,为了改善电流内环的抗扰性能,可以开率采用典型的 II型设计。
3.2.2 设计方案 2——按典型 II 阶系统进行设计电路
以上电流内环的抗扰性能不理想的主要原因是,当按照 I 型系统设计时,与电流源内环 PI 调节器中零点对应的时间常数𝜏𝑖 = 𝐿/𝑅和与典型 I 型系统开环传递函数极点对应的时间常数 1.5Ts 相比,其比值𝜏𝑖/(1.5𝑇𝑠)中频宽过大,为了提高电抗内环的抗扰性能,应该减小𝜏𝑖/(1.5𝑇𝑠)的比值(中频宽)。
为了近似确定这种设计中的 PI 调节器的参数,当𝜔𝑐 ≫ 𝑅时(𝜔𝑐为电流环截止频率),可令(1/𝑅)/[(L/R) 𝑠 + 1] ≈ 1/𝐿𝑠,即忽略 VSR 交流侧电阻 R 时的电流内环控制结构如图所示

图 13 忽略 R 时近似的电流内环结构
由此可按典型 II 型系统设计电流内环调节器,从图 13 得到电流内环的的开环传递函数为
为了尽量提高电流响应的快速性,对典型 II 型系统而言,可设计适当的中频带宽ℎ𝑖[ℎ𝑖 = 𝜏𝑖/(1.5𝑇𝑠)],工程上常数取ℎ𝑖 = 𝜏𝑖/1.5𝑇𝑠= 5。按照典型 II 型系统参数设计关系,得
解得

当按典型 II 型系统设计电流内环 PI 调节器参数时,中频带宽ℎ𝑖与跟随性指标以及与电流内环抗扰性能指标均有对应的关系
表 2 典型 II 阶系统阶跃输入跟随性指标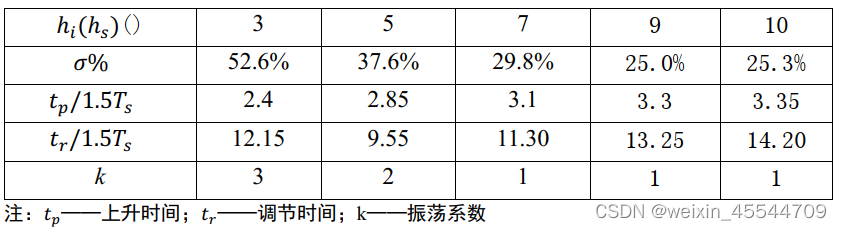
表 3 典型 II 阶系统动态抗扰性指标
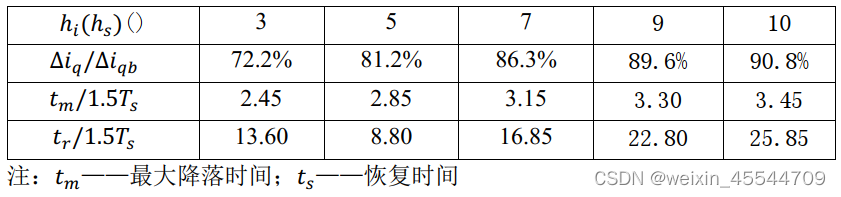
从上表中关系分析,当典型的 II 阶系统设计控制策略时,中频带宽 h 越大,系统跟随控制时间超调越小,且抗扰性变弱,因此,系统跟随性与抗扰性之间设计存在一定的矛盾,工程上只能相互兼顾,实际上,电流内环按典型 II 型系统设计时,取ℎ𝑖 = 5就是兼顾控制系统的跟随性、抗扰性的具体体现。
值得注意的是,上述典型 II 阶系统设计是一种近似设计,因为实际的电流控制对象是一阶惯性环节(𝑅1) /[(𝑅𝐿) 𝑠 + 1],将其近似成一个积分环节,往往带来设计误差,当电流采样频率,即 PWM 开关频率𝑓𝑖足够高时,可恶意忽略电流内环等效小时间常数(1.5Ts)影响,此时,若电流内环仍采用 PI 调节器控制,其内环近似结构,如图所示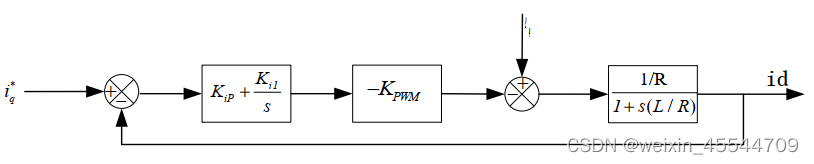
图 14 忽略小时间常数近似时的电流内环结构
若不考虑 eq 的扰动,则由图可求得电流内环的闭环传递函数为
公式中

由公式(45)算得电流内环阻尼比𝜉和自然振荡频率𝜔𝑛为

联立公式(46)和(47),计算得
当电流内环近似成一阶惯性环节时,电流内环频带宽度𝑓𝑏𝑖 = 𝑓𝑤/20,因此,工程中可取电流内环自然振荡频率𝜔𝑛 ≤ 2𝜋𝑓𝑤/20,阻尼比为𝜉 = 0.707,将𝜔𝑛和𝜉带入公式(48),即可计算出电流内环的 PI 参数
3.2.3 电压外环的设计
电压外环控制的目的是为了稳定 PWM 整流器的整流侧电压𝑢𝑑,为简化控制系统的设计,当开关频率远高于电网电动势基波频率时,可忽略 PWM 谐波分量,经过推导可得,当不考虑负载扰动时,电压外环的简化结构如图所示,其中𝜏𝑣是电压采样小惯性时间常数, 𝑇𝑐𝑣 = 𝜏𝑣 + 3𝑇𝑠, 𝐾𝑣和𝑇𝑣分别为电压外环的 PI 调节器参数。
图 15 电压外环简化结构
由于电压外环的主要控制作用是稳定直流侧电压,故可对进行控制系统设计时,应重点考虑其抗扰性能,可以按照典型 II 型系统进行设计
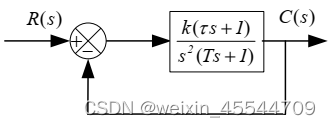
图 16 典型 II 阶系统的结构
电压外环的开环传递函数为
可得到电压外环的中频的带宽 h,为

由典型 II 阶系统的控制器参数整定原则可知

综合电压外环的抗扰性能和跟随性能,一般取中频带宽ℎ𝑣为 5,则可以以求得电压外环的调节器参数为




















 318
318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











