






 本文讨论了六自由度机械臂,如PUMA,如何在末端姿态有8种可能的逆解中进行选择,特别关注Flip和NoFlip的区别,以及它们在工业机器人轨迹规划中的应用,引用了PerumaalSS和JawaharN的相关研究。
本文讨论了六自由度机械臂,如PUMA,如何在末端姿态有8种可能的逆解中进行选择,特别关注Flip和NoFlip的区别,以及它们在工业机器人轨迹规划中的应用,引用了PerumaalSS和JawaharN的相关研究。
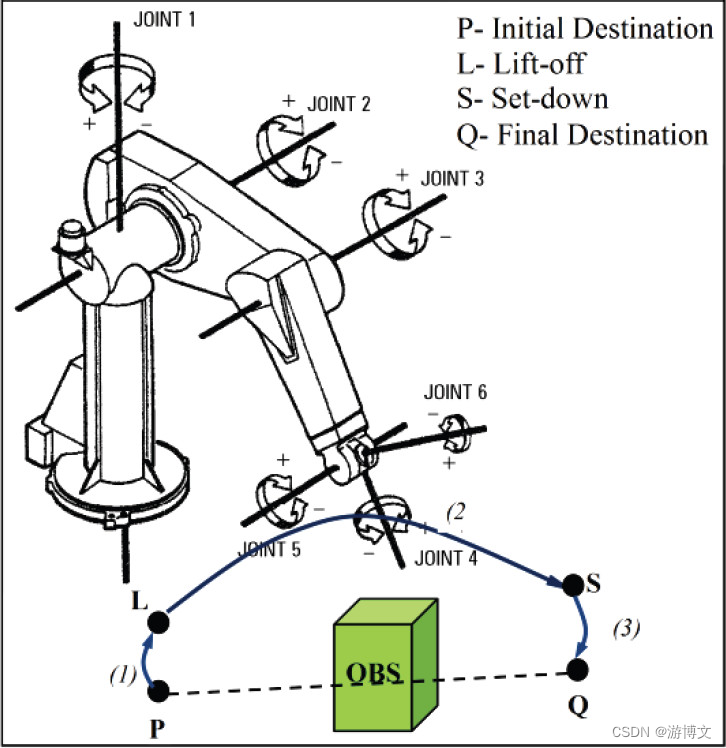
对于一般的六自由度机械臂,对于一般的末端姿态,其存在8组不同的逆解,对于这八个不同的配置,在一些机器人厂商的运动代码是可以选择的,其通常是通过 Left, Right, Down, Up, No Flip, Flip 这几个值来选择的。
以典型的六自由度机械臂PUMA为例
对于笛卡尔坐标系下的一个末端姿态,其对应的八个配置可以按以下的方式进行区分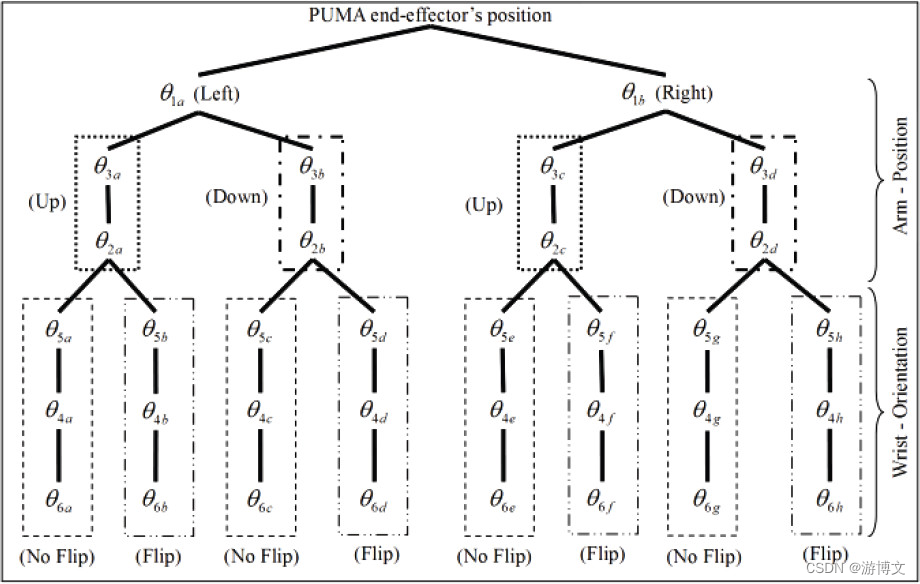
其中,Flip 和 No Flip的关系可由如下公式说明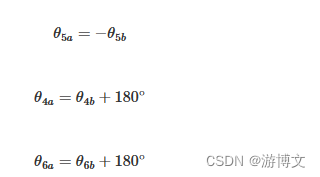
参考文献:
1.
Perumaal SS, Jawahar N. Automated Trajectory Planner of Industrial Robot for Pick-and-Place Task. International Journal of Advanced Robotic Systems. 2013;10(2). doi:10.5772/53940

















 4767
4767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









