







首先先学习最小二乘问题
https://blog.csdn.net/weixin_45634390/article/details/137337145?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22137337145%22%2C%22source%22%3A%22weixin_45634390%22%7D
目标优化函数
那么问题就变成了求解目标函数,待优化函数
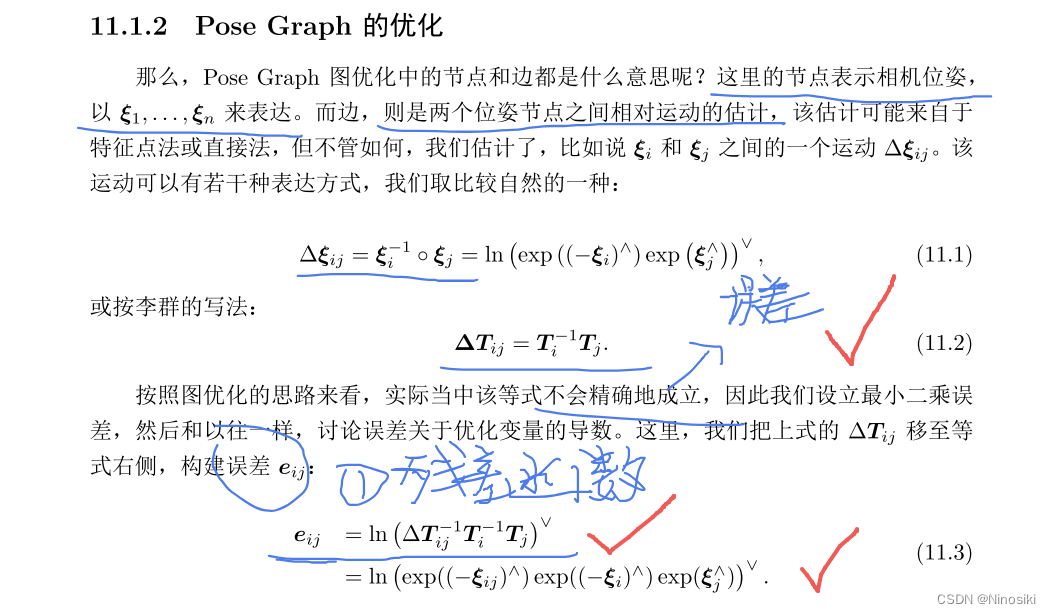
在这个位姿图优化问题中,优化的是一个非线性最小二乘问题,目的是最小化所有观测误差的加权和。这个误差是由位姿图中所有边上的测量误差构成的。每条边表示两个节点(即位姿)之间的相对位姿测量,误差是测量值与根据当前位姿估计计算出的预期值之间的差异。
具体地,优化的目标函数形式如下:
min ξ 1 2 ∑ ( i , j ) ∈ E e i j ( ξ ) T Σ i j − 1 e i j ( ξ ) \min_{\xi} \frac{1}{2} \sum_{(i,j) \in E} e_{ij}(\xi)^T \Sigma_{ij}^{-1} e_{ij}(\xi) ξmin21(i,j)∈E∑eij(ξ)TΣij−1eij(ξ)
其中,
- E E E 是所有边的集合。
- e i j ( ξ ) e_{ij}(\xi) eij(ξ) 是边 ( i , j ) (i, j) (i,j) 上的误差向量,表示节点 i i i 和节点 j j j 之间的相对位姿测量误差。在SLAM中,这个误差通常包括位置和方向的差异。
- Σ i j − 1 \Sigma_{ij}^{-1} Σij−1 是边 ( i , j ) (i, j) (i,j) 上的信息矩阵(即测量误差的协方差矩阵的逆),表示测量的置信度。
- ξ \xi ξ 表示所有节点位姿的集合,是优化问题的决策变量。
误差 e i j ( ξ ) e_{ij}(\xi) eij(ξ) 的计算依赖于两个节点当前的位姿估计,并且与边 ( i , j ) (i, j) (i,j) 关联的观测值。在实践中,这个误差通常通过比较边上的观测位姿(例如,来自传感器测量)与根据两个节点当前估计位姿计算出的相对位姿之间的差异来计算。
优化问题的关键在于找到一组位姿 ξ \xi ξ,使得上述目标函数最小。这通常通过迭代方法完成,如高斯-牛顿法、Levenberg-Marquardt法或Dogleg法。每次迭代都会计算当前估计位姿下的误差及其关于位姿的导数(即雅可比矩阵),然后更新位姿估计以减少总误差。这个过程重复进行,直到达到一定的收敛条件,例如迭代次数、位姿更新量或目标函数改善量。
代码实现
1、
computeError函数用于计算位姿图优化问题中一条边的误差
// 误差计算与书中推导一致
virtual void computeError()
{
Sophus::SE3 v1 = (static_cast<VertexSE3LieAlgebra*> (_vertices[0]))->estimate();
Sophus::SE3 v2 = (static_cast<VertexSE3LieAlgebra*> (_vertices[1]))->estimate();
_error = (_measurement.inverse()*v1.inverse()*v2).log();//(11.2)(11.3)
}
对应书中推导:
2、
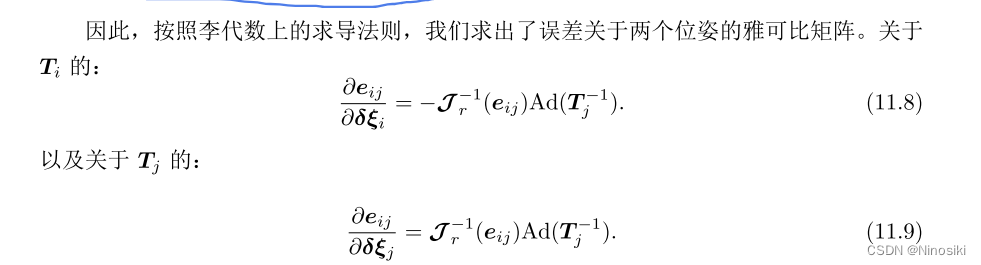
// 雅可比计算
virtual void linearizeOplus()
{
Sophus::SE3 v1 = (static_cast<VertexSE3LieAlgebra*> (_vertices[0]))->estimate();
Sophus::SE3 v2 = (static_cast<VertexSE3LieAlgebra*> (_vertices[1]))->estimate();
Matrix6d J = JRInv(SE3::exp(_error));
// 尝试把J近似为I?
_jacobianOplusXi = - J* v2.inverse().Adj();//(11.8)
_jacobianOplusXj = J*v2.inverse().Adj();//(11.9)
}
对应:
3、
代入1、2就得到了目标函数















 1387
1387











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









