







使用Setup Assistant配置机械臂
总述
假设使用自己创建的机器人URDF模型,则使用MoveIt!的第一步就是用Setup Assistant工具完成一些配置工作。Setup Assistant会根据用户导入的机器人URDF模型生成SRDF(Semantic Robot Description Format)文件,从而创建一个MoveIt!配置的功能包,完成机器人的配置、可视化和仿真等工作。
1、安装moveit,执行如下命令
sudo apt-get install ros-kinetic-moveit-*
2、运行moveit
启动ROS系统
roscore
打开新的命令终端,启动配置助手
rosrun moveit_setup_assistant moveit_setup_assistant
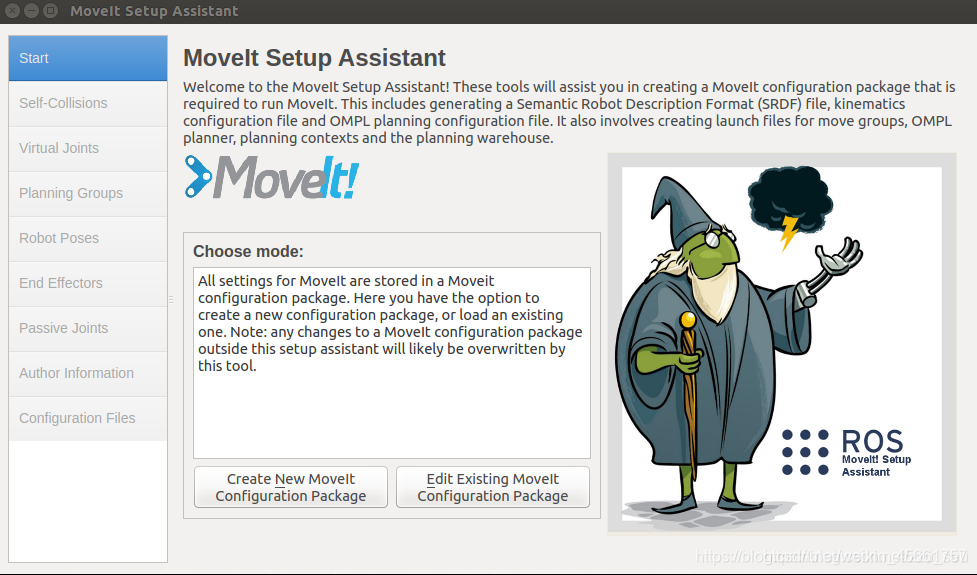
一、加载机器人URDF模型
点击第一个功能
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











