这个问题的来源是对四足进行仿真,因为一般的狗腿是串联腿,在webots中只要使用HingeJoint表示各个关节,并且下一个关节定义在children中即可,但对于并联腿的话,解决方式会略有不同,下面进行详细的说明。 以下面这张图片中的腿结构进行分析这个腿的结构为四边形结构,抽象为下面这个图片,有两个电机分别控制 θ 和 γ \theta和\gamma θ和γ 在webots中,只需要在驱动关节的HingeJoint中的device添加电机,其余的HingeJoint的device都是空的在最后的交点处添加连杆关联(endPointSolidReference),如下图








 本文介绍如何在Webots中实现四足机器人并联腿的仿真。通过分析四边形结构腿的具体构造,详细解释了如何利用HingeJoint及电机控制θ和γ角,并在交点处使用连杆关联实现。
本文介绍如何在Webots中实现四足机器人并联腿的仿真。通过分析四边形结构腿的具体构造,详细解释了如何利用HingeJoint及电机控制θ和γ角,并在交点处使用连杆关联实现。
 这个腿的结构为四边形结构,抽象为下面这个图片,有两个电机分别控制
这个腿的结构为四边形结构,抽象为下面这个图片,有两个电机分别控制 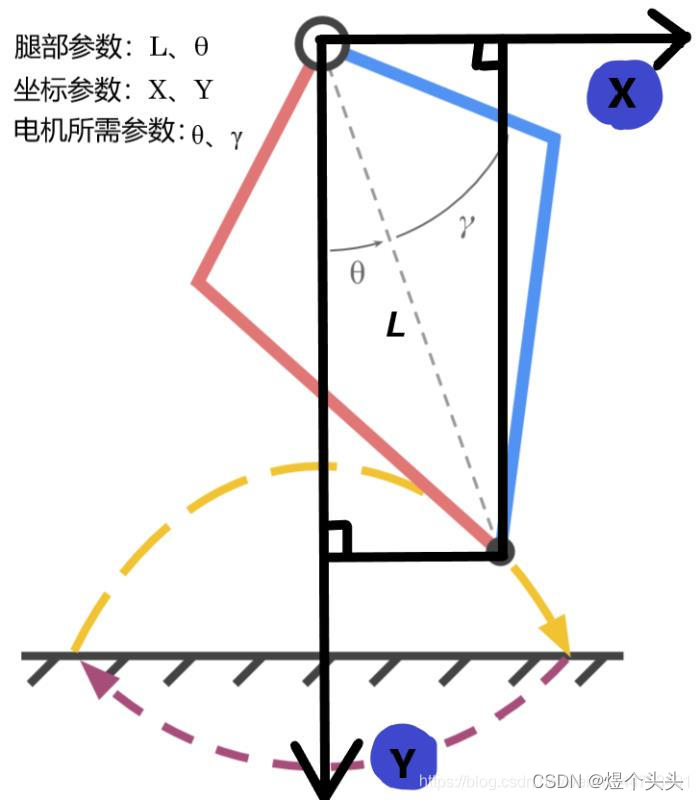



















 1084
1084

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








