







说明
模型来源于:LaneNet模型
环境pycharm
1、数据准备
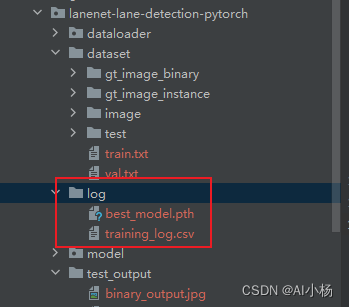
把处理好的数据放入改模型下,如图:
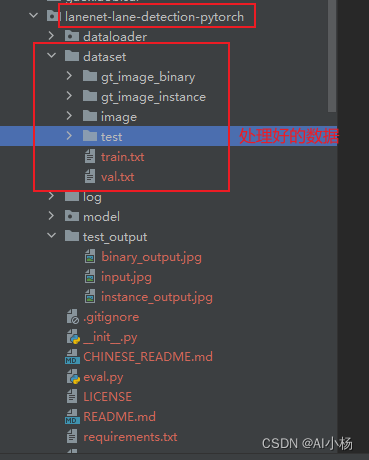
注意:数据处理方法参考我上一篇博客:tusimple数据集处理
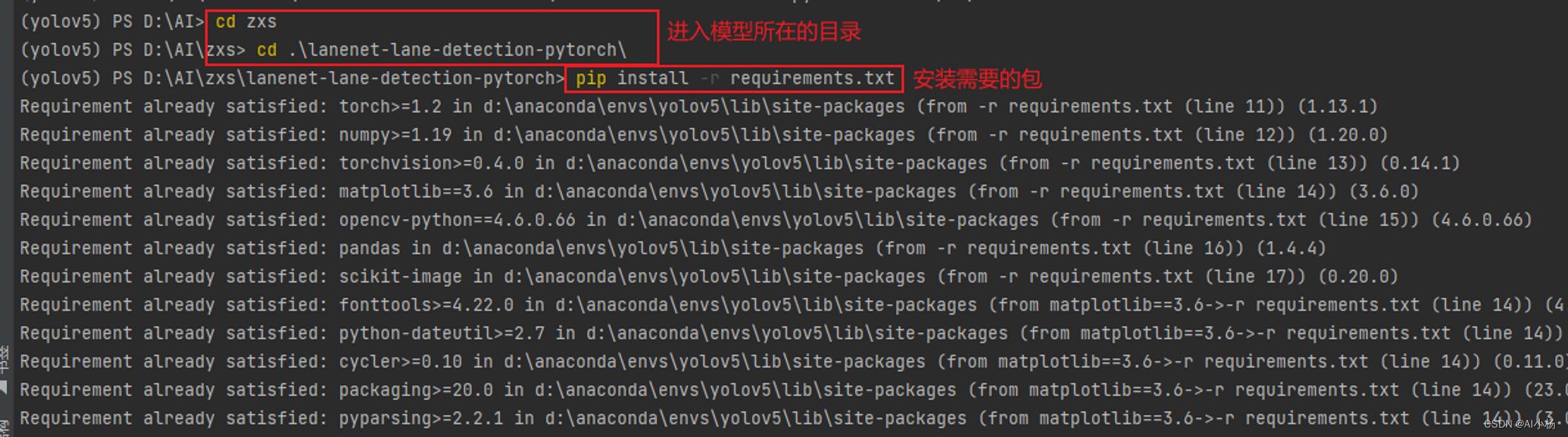
2、环境配置
进入模型路径下,然后安装依赖包,在pycharm终端中输入如下:
pip install -r requirements.txt
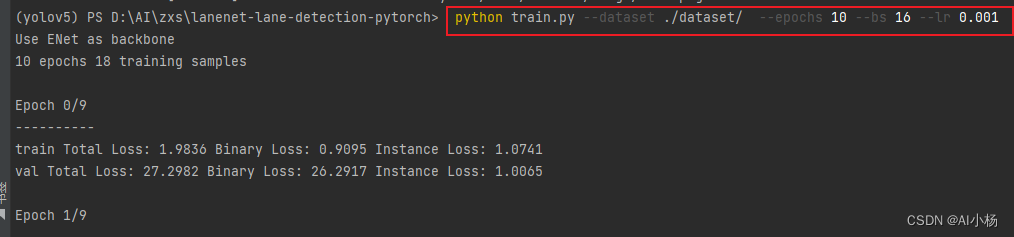
3、模型训练
模型训练:
python train.py --dataset ./data/dataset/ --epochs 10 --bs 16 --lr 0.001
可选参数:
–dataset:数据集路径
–epochs:训练轮次(默认25)
–lr:学习率(默认0.0001)
–bs:批次文件数量(默认4)
注意:为了节省时间,我只训练10轮
- 运行截图
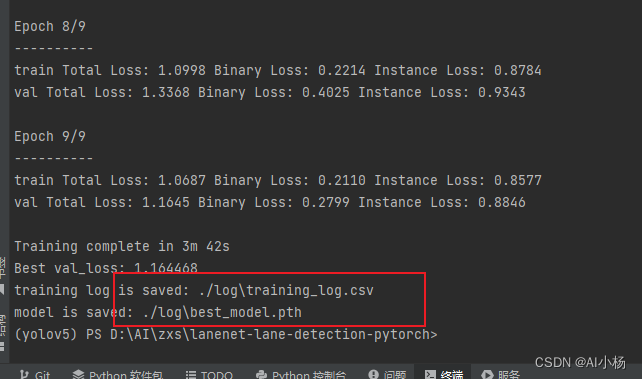
运行完成后最后两行反馈的是训练结果保存路径,结果保存到当前目录下的log文件夹下:
4、模型评估
- 修改配置文件:
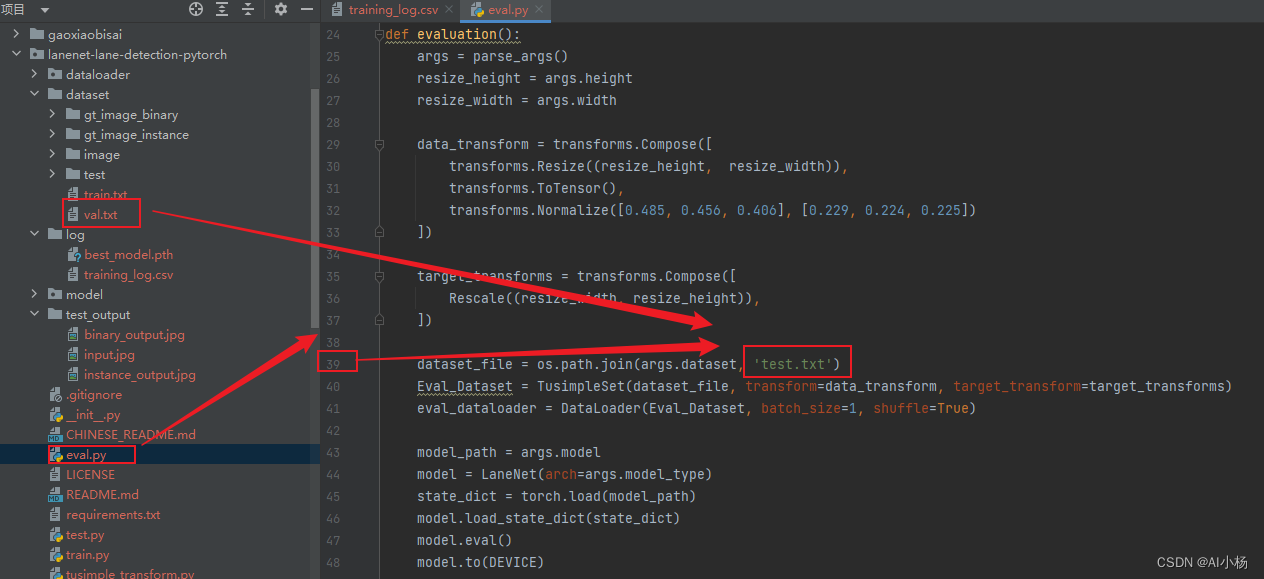
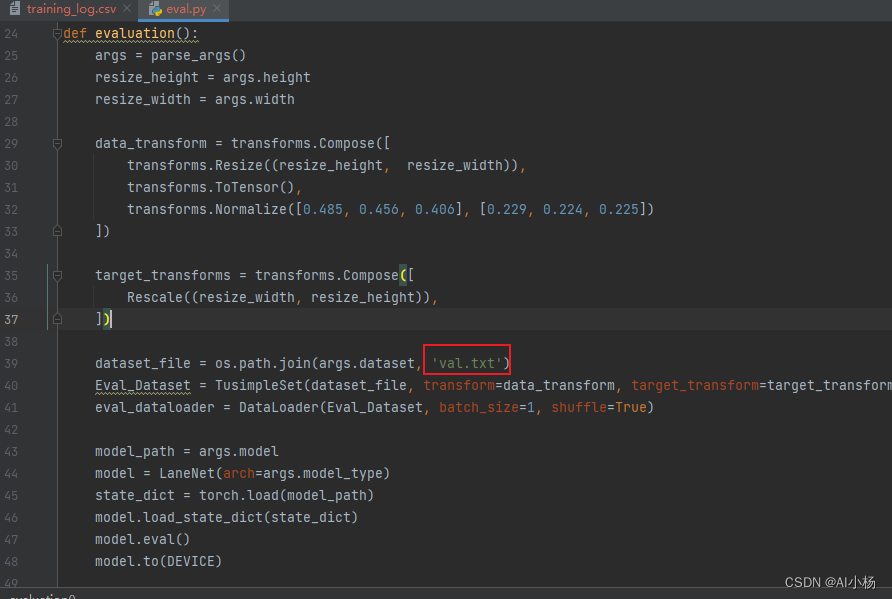
因为我数据集处理的时候里面的测试集我命名为val.txt,所以要把模型当前目录下的eval.py文件的第39行处的test.txt换为val.txt,如下图:
- 模型评估
python eval.py --dataset ./dataset/
- 运行截图

注意:别问评分为什么这么低,因为我的数据集只有十几张图片,而且
训练次数也很少,所以评分很低,此处实验只是为了演示LaneNet模型的车道线检测实现,为了省时间在训练次数和数据处理上都是随便敷衍一下。
5、模型预测
python test.py --img ./dataset/test/0004.png
- 运行截图

- 运行结果
结果保存在当前目录下的test_output文件夹下:
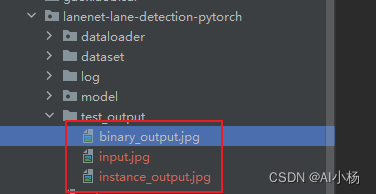
三张图的效果分别如下:
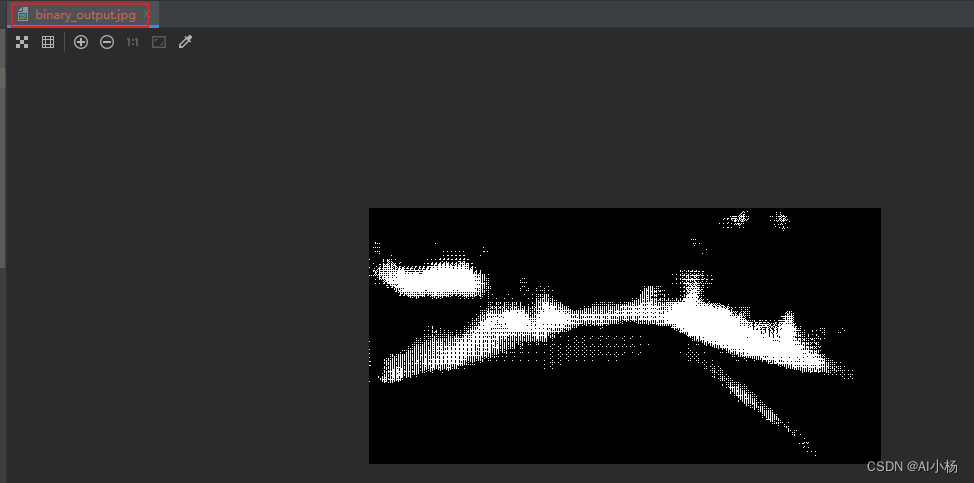
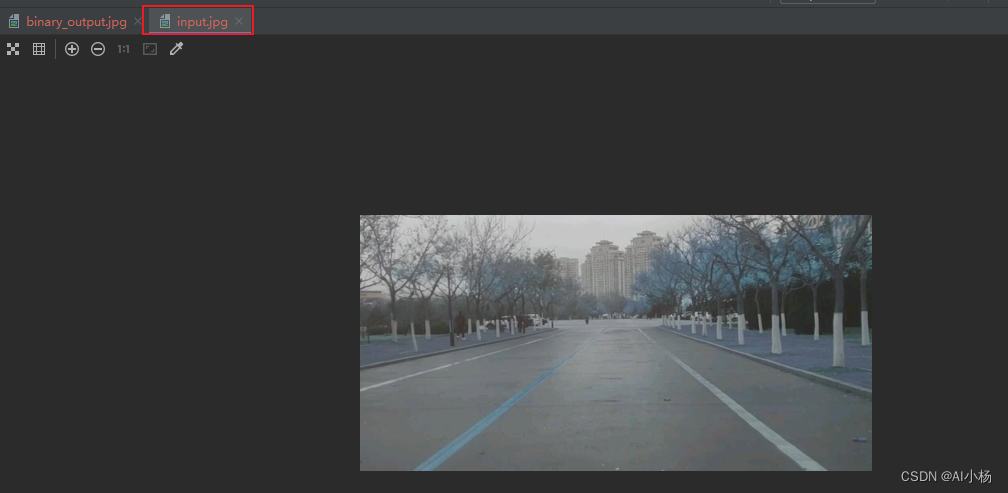
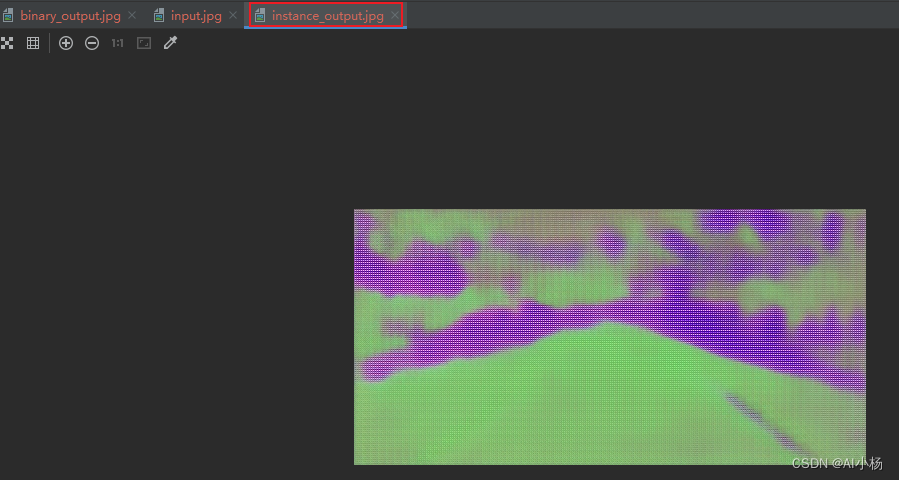
效果差的原因:数据少,训练少(就单纯的百忙之中抽时间来敷衍一下大家,谢谢观看)。















 814
814











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











