







 本文探讨了双闭环直流调速系统中ASR(转速调节器)和ACR(电流调节器)的设计准则,重点分析了积分部分限幅对系统稳定性的影响。通过仿真比较了积分部分限幅前后系统的超调量、响应速度和电流稳定性,强调了在实际建模中考虑积分限幅的重要性。此外,文章还涉及突增负载下的控制策略和实验验证。
本文探讨了双闭环直流调速系统中ASR(转速调节器)和ACR(电流调节器)的设计准则,重点分析了积分部分限幅对系统稳定性的影响。通过仿真比较了积分部分限幅前后系统的超调量、响应速度和电流稳定性,强调了在实际建模中考虑积分限幅的重要性。此外,文章还涉及突增负载下的控制策略和实验验证。
文章目录
1 双闭环直流调速系统的设计准则
1.1 ASR和ACR的作用
1.转速调节器的作用
1)转速调节器是调速系统的主导调节器它使转速n很快地跟随转速给定U。变化,稳态时可减小转速误差,如果采用PI调节器,则可实现无静差。
2)对负载变化起抗扰作用。
3)其输出限幅值决定电动机允许的最大电流。
2.电流调节器的作用
1)作为内环的调节器,在转速外环的调节过程中,它的作用是使电流紧紧跟随其给定电压U*(即外环调节器的输出量)变化。
2)对电网电压的波动起及时抗扰的作用。
3)在转速动态过程中,保证获得电动机允许的最大电流,从而加快动态过程。
4)当电动机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用。一旦故障消失,系统自动恢复正常。这个作用对系统的可靠运行来说是十分重要的。
1.2 ASR和ACR设计
1.3 ASR和ACR建模中的注意事项
由于实际的PI控制器都是有上限输出的,因此需要限幅,但是在Simulink下的pid模块的输出限幅只是对输出加了一个限幅模块,也就是其内在的积分项还是会一直积分,这会出现当双闭环调速系统进入ASR退饱和时无法退饱和,因为此时的积分项输出已经很大了,就算反向积分输出依旧达到幅值。
介于这种情况,我们需要用积分模块和比例模块搭建PI控制器,然后在输出端加一个限幅模块,但是注意这个时候依旧存在上面的问题,我们还需要设置积分模块的输出限幅,将其设置为和限幅模块相同的限幅值,至此,PI控制器才与实际模拟控制器具有相同工作特性。
双闭环控制系统需要在第一阶段和第二阶段保持ASR的饱和状态和ACR的不饱和状态,第三阶段ACR与ASR均不饱和,因此Simulink限幅值的选取要注意。
这里我ASR限幅40,ACR限幅5。
2 实验要求
3 实验处理
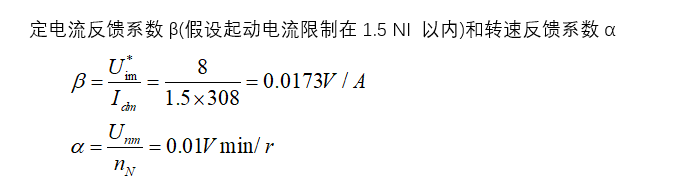
3.1 问题(1)
3.2 问题(2)
电力拖动自动控制系统-运动控制系统习题解答第2-5章 - 百度文库 (baidu.com)
3.3 问题(3)
3.3.1 转速调节器积分部分不限幅的仿真波形
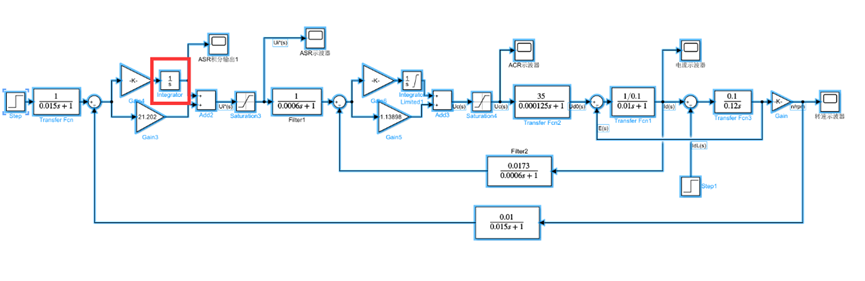
图1 转速调节器积分部分不限幅的结构图
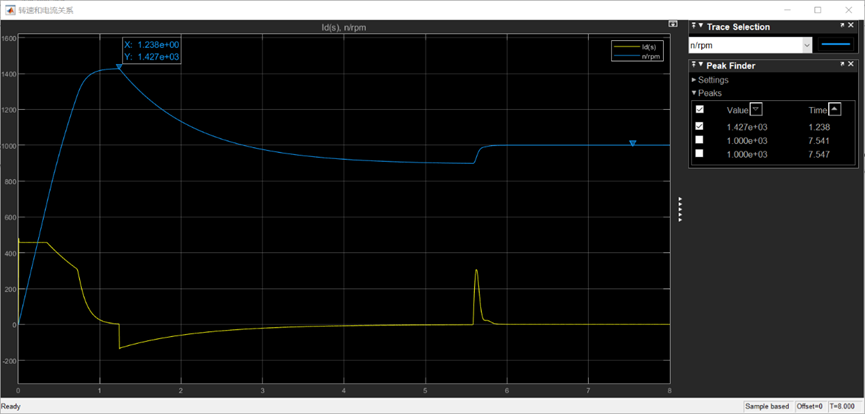
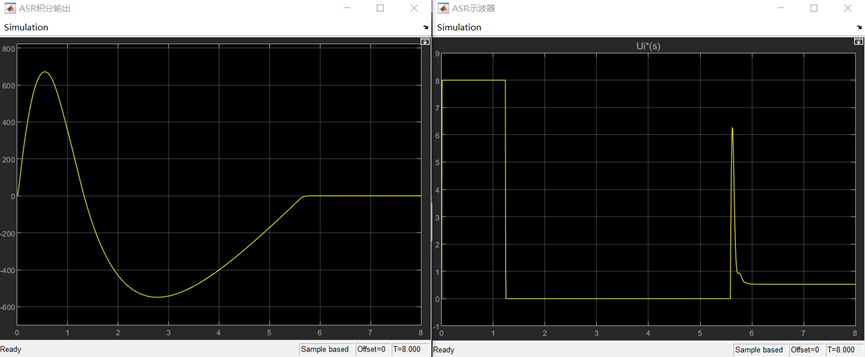
图2 仿真波形(包括转速、电流、转速调节器输出、转速调节器积分部分输出)
3.3.2 转速调节器积分部分限幅的仿真波形
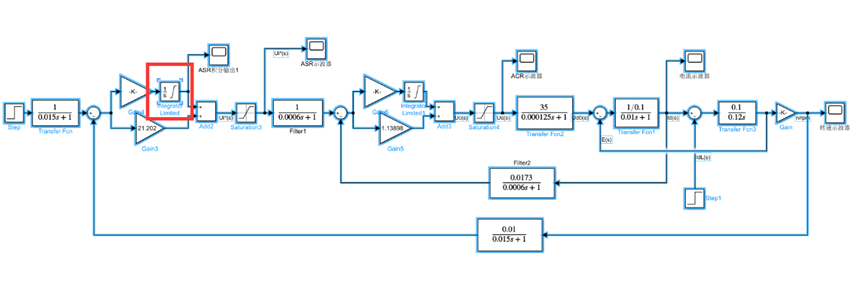
图3 转速调节器积分部分限幅的结构图
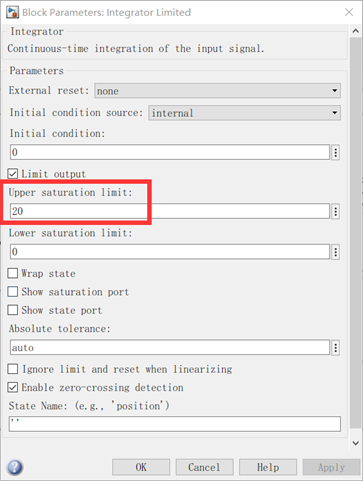
图4 积分限制器的上限值设置
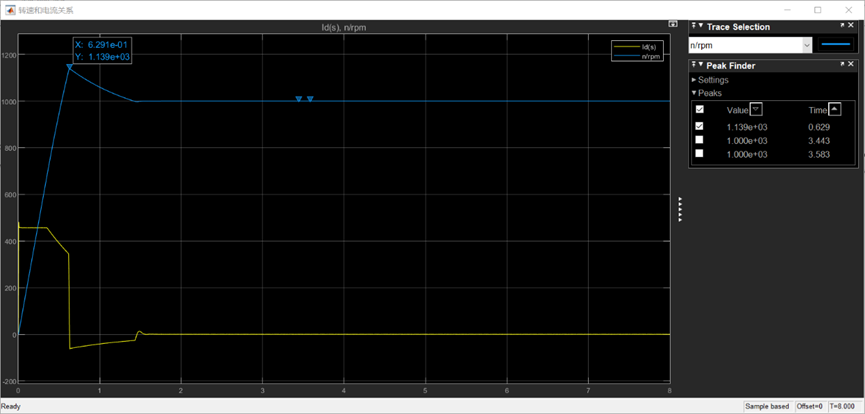
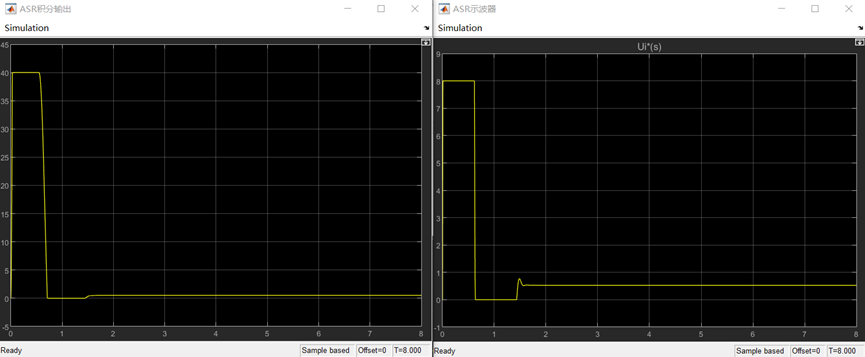
图5 仿真波形(包括转速、电流、转速调节器输出、转速调节器积分部分输出)
在ASR积分部分不限幅时,有图可知,积分部分达到了正向约671V的电压,反向也有-550V的电压,如此剧烈的震荡将导致ASR输出短时间内达到正向和反向的最大值(正负8V),进而导致ASR的输出先被限制在8V,后在积分部分反向积分时,限制在-8V。并且因为ASR的输出先被限制在8V较长,导致ACR的积分部分累积误差过大,导致ACR的输出达到限幅,失去了电流的跟随能力,转速也在该时刻发生了突变,但随着反向退饱和ACR又恢复了正常工作。
而加入积分部分限幅后,ASR输出被限制在8V,积分部分被限制在40V,并且积分部分作用时间明显减少,使得系统震荡幅度变小,从而使得控制电压Uc变化较小,反应在输出转速较不加限幅仅有轻微的震荡。随着ASR输出电压大小和持续时间的变化,系统输出转速和电枢电流也发生了变化。
电枢电流的区别是: 加入积分部分限幅后,电枢电流的震荡时间和震荡次数明显减小。
从动态特性角度分析两者区别:
① 超调量的对比: 当转速调节器积分部分不限幅时,由波形分析出转速超调较多最大超调达到了1427r/min,超调量达到了42.7%,如此大的超调不利于对电机的保护和使用,启动过程中容易出现异常。当转速调节器积分部分限幅时,由波形分析出转速超调较多最大超调达到了1139/min,超调量只有13.9%。
② 响应速度的对比: 在转速达到峰值时,ASR积分部分不限幅时,系统响应速度过快,最大动态偏差和震荡幅度极大。当ASR积分部分限幅时,系统响应震荡幅度变小,在经过微小的震荡后,输出达到额定转速,系统响应速度明显提高。
原因: 加入积分部分限幅后,ASR积分部分被限制无法持续增长,导致ASR输出震荡幅值和时间都减小,使得转速控制更加平稳。
3.4 问题(4)
对突增负载用分别采用比例调节器和比例积分调节器进行仿真。在上述基础上电动机带40%的负载,即在step1处加一个发生在初始时刻大小为123.2的阶跃。
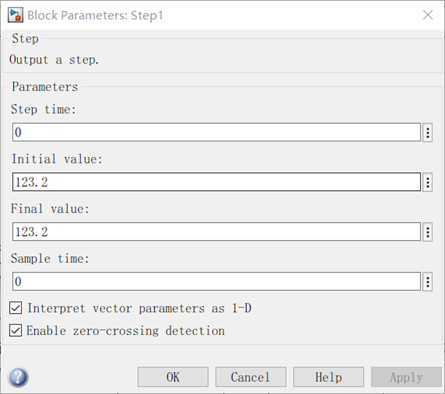
图6 step1输入的设置
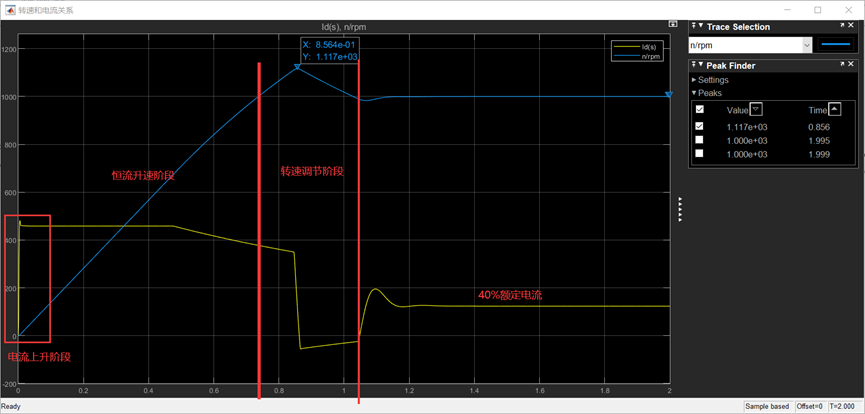
图7 电动机带40%额定负载起动时的输出转速
峰值转速为1117r/min,超调量为11.7%,而计算结果为11.23%。可见我们的仿真结果与我们的理想计算结果很相近。实验验证了我们理论的准确性。
并且我在图中绘制了启动的三个阶段,可以很清晰的看到变化过程,但本人参数调节不是特别合适,导致电流和转速曲线不平滑。读者可再继续调节,可以调节出更平滑的曲线。
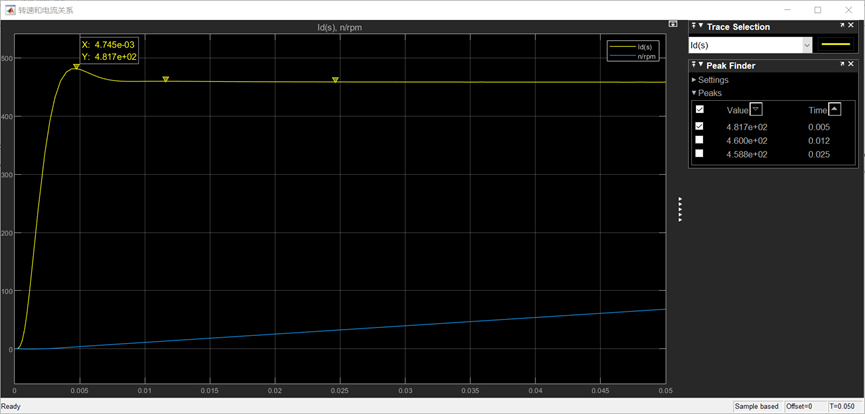
图8 电动机带40%额定负载起动时的电流上升阶段
3.5 问题(5)
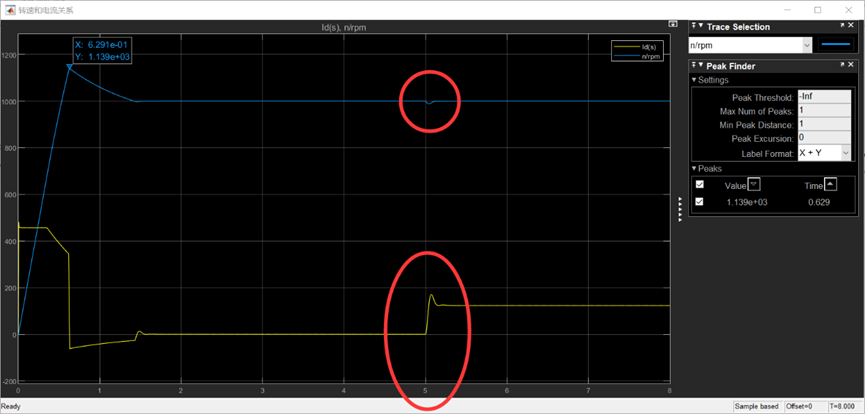
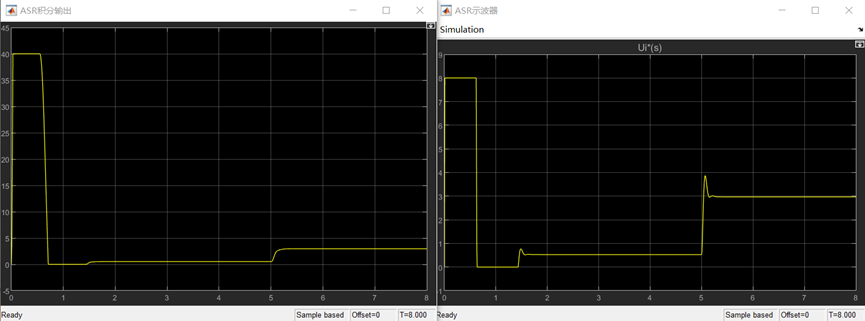
图8 仿真波形(包括转速、电流、转速调节器输出、转速调节器积分部分输出)
在5s突加40%额定负载,转速调节器限幅后的仿真波形如上。
波形变化: 输出转速有细微的下降,但经过微小的下降后立刻恢复到额定转速。因为ASR输出电压的增大,并进入新的稳态值,导致的控制电压的增加,输出转速很快又调节到额定转速。控制电压增加,导致电枢电压增加,并同ASR输出电压U* 一样进入新的稳态值。
原因: 输出转速下降,因为电磁转矩小于负载转矩,由公式易知转速会降低。而又因为转速降低,导致偏差电压增大,PI控制器起作用而且积分器累积偏差,使得ASR输出电压U*增加。
4 实验总结
因为转速单闭环系统无法按照要求充分控制电流的动态过程,而对于部分生产机械在不同生产状态下需要有不同的转速值和电流值,即要求存在转速和电流两种负反馈,因此采取转速和电流两个调节器。ACR构成内环,ASR构成外环,即双闭环调速系统。
在实际建模中,系统会有一些不一样,反馈环节都要变成一个小惯性环节的低通滤波器,输入端也要有一个相应的惯性环节。
在设计双闭环调速系统时,一般是先内环后外环,调节器的结构和参数取决于稳态精度和动态校正的要求,双闭环调速系统动态校正的设计与调试都是按先内环后外环的顺序进行,在动态过程中可以认为外环对内环几乎无影响,而内环则是外环的一个组成环节。

















 1469
1469

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









