







目录
文章目录
Belief-Desire-Intention模型(BDI模型)
Intentional Notions
常识心理学通过归因诸如相信(believing)、渴望(desiring)、想要(wanting) 等态度来解释人类行为,比如:“迈克尔努力工作是因为他想获得博士学位。
这种常识心理学描述中所使用的态度被称为意向性概念(Intentional Notions), 那在多智能体系统领域,能否用这些意向性概念来对计算系统重的智能体的行为进行建模呢?
Intentions in Practical Reasonning
在智能体研究领域,BDI模型/理论最初由布拉特曼 (Bratman)于1987年提出:
- 确定实践推理中
意图(Intention)的属性 意图(Intention)指向未来,以指导智能体的规划并限制其采纳其他意图- 意图作为智能体行动计划(plan)的要素,构建智能体当前和未来的行为
- 意图给行动者带来了问题,他们需要确定实现意图的方法
- 如果我有赚钱的意图,你会期望我投入资源来决定如何实现赚钱
- 意图为采纳其他意图提供了一个“过滤器”,这些意图不能相互冲突
- 如果我有赚钱的意图,你不会期望我采纳一个与赚钱相互冲突的意图 ∼ $
- Agent会追踪其意图的实现情况,如果尝试失败,他们倾向于再次尝试
布拉特曼等人 [1988] 认识到信念(Beliefs)、愿望(Desires)和意图(Intentions)(BDI)在建模智能体的理性行为方面的首要地位:
- An agent’s beliefs represent the information the agent has about the world
- An agent’s desires represent the states of affairs that the agent would wish to bright about
- An agent’s intentions represent those desires that have been committed by the agent
BDI model/theory 为资源受限的智能体进行plan-based的practical reasoning提供了依据:
- 智能体的资源是受限的
- 它们无法在深思熟虑上花费无限的时间
- 智能体
Plan的一个主要作用是限制其进一步进行实践推理的工作量 - BDI模型已成功实现并应用于多个复杂领域
如何构建Agent
构建智能体经典方法:
- Beliefs (present/past world states)
- 信念(当前/过去的世界状态)
- Desires/Goals (desired states)
- 愿望/目标(期望的状态)
- Form & execute plan
- 制定并执行计划
但是规划智能体的过程中可能会失败:
Commitments
智能体进行**规划(Plan)**是因为它们的资源是有限的:
- Agents must form and commit to plans (settle on plans)
- Commit == hold on to a plan, don’t drop it easily
- Commitments constrain reasoning:
- Intention is kind of committed plan (e.g. my next trip)
- Conflict
- Balanced commitments
- Should not expect perfect balance locally, need global success
Modal Logic的快速笔记
在关于智能体的推理中使用模态逻辑(Modal Logic):
- Logic of
necessity□ andpossibility◇ - Logic of “
must be” and “may be” - More broadly, includes:
Temporal logic(about time)- 时态逻辑(关于时间)
Doxastic logic(about belief)- 信念逻辑(关于信念)
Epistemic logic(about knowledge)- 认知逻辑(关于知识)
Deontic logic(about obligations, permissions, …)- 道义逻辑(关于义务、许可等)
在Modal Logic中建模Commitments
-
符号表示:
Bel (x P): Agent x has P as a beliefGoal (x P): Agent x has P as a goal(Eventually P): Somewhere in the future P becomes True(Until P Q)/(Q Until P): Q is True until P True(Always P): (NOT (Eventually NOT§))(Never P): (Always (NOT§)AND, OR, NOT: Logic connectives
-
具体符号及含义理解
- Bel (x P)
- 含义:表示智能体 x 持有信念 P 。即从智能体 x 的认知角度,它认为 P 是成立的。例如,若 P 表示 “当前环境温度过高” ,Bel (x P) 就意味着智能体 x 相信当前环境温度过高。这是对智能体认知状态的一种形式化描述。
- Goal (x P)
- 含义:智能体 x 将 P 作为自身的目标 。比如 P 为 “到达指定地点” ,那么 Goal (x P) 表明智能体 x 的目标是到达指定地点。它明确了智能体的期望状态。
- (Eventually P)
- 含义:在未来的某个时刻,P 会变为真 。它描述了一种未来可能发生的情况。例如,若 P 是 “任务成功完成” ,(Eventually P) 表示在未来的某个时间点,任务会成功完成,强调了一种时间上的可能性。
- (Until P Q)/(Q Until P)
- 含义:Q 为真的状态会一直持续,直到 P 变为真 。比如 Q 表示 “智能体持续移动” ,P 表示 “到达目标位置” ,(Q Until P) 就表示智能体持续移动,直到到达目标位置。这用于描述两个事件或状态之间在时间上的先后和持续关系。
- (Always P)
- 含义:通过逻辑等价式 (NOT (Eventually NOT §)) 来理解,它表示 P 在未来永远为真,不存在 P 为假的时刻 。例如,若 P 表示 “某种规则始终有效” ,(Always P) 就强调这种规则在任何未来时刻都不会失效。
- (Never P)
- 含义:由 (Always (NOT §)) 可知,它表示 P 在未来永远不会为真 。比如 P 为 “系统出现故障” ,(Never P) 表示系统在未来任何时候都不会出现故障,是对某种情况的否定性的时间描述。
- AND, OR, NOT
- 含义:这些是常见的逻辑连接词 。AND 表示合取,即两个条件同时为真时整个表达式才为真;OR 表示析取,只要其中一个条件为真整个表达式就为真;NOT 表示否定,将一个命题的真假值取反。它们用于组合和操作上述关于智能体信念、目标等的模态逻辑表达式,构建更复杂的逻辑关系。
Commitments to Achievement Goals
-
目标与智能体的基本关系
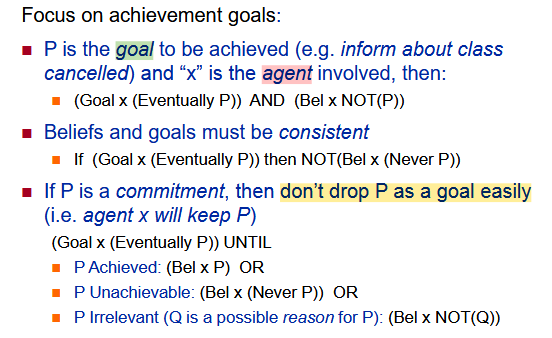
- 目标设定:这里将 P 定义为要达成的目标(例如 “通知课程取消” ),x 代表涉及的智能体。表达式 (Goal x (Eventually P)) AND (Bel x NOT §) 表示智能体 x 有一个目标,即在未来某个时刻达成 P ,但同时它相信目前 P 还未达成。比如智能体 x 的目标是通知课程取消,而它当前知道课程还未被取消。
-
信念与目标的一致性
- 逻辑约束:要求信念和目标必须保持一致,即如果智能体 x 有目标在未来达成 P ,也就是 (Goal x (Eventually P)) ,那么它不能同时相信 P 永远不会达成,即 NOT (Bel x (Never P)) 。这是为了确保智能体的认知和目标设定在逻辑上是合理的。例如,如果智能体的目标是完成某项任务,它就不能同时坚信这项任务永远无法完成。
-
目标承诺的稳定性
- 持续追求:当 P 是智能体的一个承诺目标时,智能体不会轻易放弃这个目标。
- 表达式 (Goal x (Eventually P)) UNTIL 描述了这种坚持,直到出现以下几种情况:
- 目标达成:当智能体相信 P 已经达成时,即 (Bel x P) 。
- 比如智能体确认课程取消的通知已经成功发出,就意味着目标达成。
- 目标无法实现:当智能体相信 P 永远无法达成时,即 (Bel x (Never P)) 。
- 例如,如果出现了一些不可抗力因素,使得课程取消的通知绝对无法发出,智能体就会认为目标无法实现。
- 目标不再相关:当智能体相信导致设定目标 P 的原因 Q 不再成立时,即 (Bel x NOT (Q)) 。比如设定通知课程取消这个目标是因为课程确实要取消(Q 为课程要取消 ),但如果后来发现课程不取消了,那么这个目标就不再相关,智能体可以不再坚持。
- 目标达成:当智能体相信 P 已经达成时,即 (Bel x P) 。
Commitments as Persistent Goals (PGOALs)
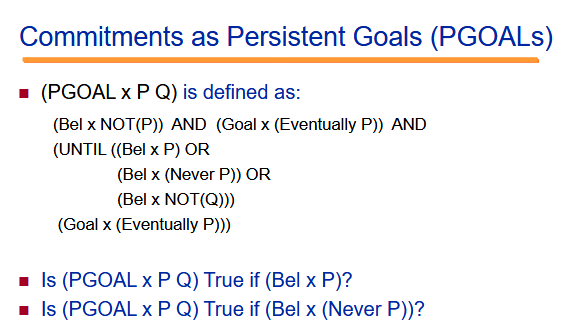
(PGOAL x P Q)的定义- 初始信念与目标设定:
- (Bel x NOT §) AND (Goal x (Eventually P)) 表明智能体 x 相信当前目标 P 尚未达成,同时它持有在未来某个时刻达成 P 的目标。
- 例如,智能体 x 的目标是清理房间(P ),而它当前知道房间还没清理干净。
- 持续条件与终止条件:
- (UNTIL ((Bel x P) OR (Bel x (Never P)) OR (Bel x NOT (Q)))) (Goal x (Eventually P))
- 描述了智能体持续持有该目标的条件,直到出现以下几种情况:
- 当智能体相信目标 P 已经达成,即 (Bel x P) ,比如智能体确认房间已清理干净。
- 当智能体相信目标 P 永远无法达成,即 (Bel x (Never P)) ,例如如果房间遭遇严重损坏,根本无法完成清理。
- 当智能体相信导致设定目标 P 的原因 Q 不再成立,即 (Bel x NOT (Q)) 。假设设定清理房间这个目标是因为有客人要来(Q 为有客人要来 ),但如果客人不来了,这个目标的相关性就消失了。
- 总结:整个表达式综合起来,完整定义了智能体 x 在何种情况下会将目标 P 作为一个持久目标(承诺 )来追求。
- 初始信念与目标设定:
- 真假性判断问题
- 当 (Bel x P) 时:
- 思考 (PGOAL x P Q) 是否为真,即当智能体相信目标 P 已经达成时,基于前面的定义,此时满足了终止条件之一,从逻辑上看,智能体不再会将 P 作为一个持续追求的目标(承诺 ),所以 (PGOAL x P Q) 应为假。
- 当 (Bel x (Never P)) 时:
- 探讨 (PGOAL x P Q) 是否为真,当智能体相信目标 P 永远无法达成时,也满足了终止条件,智能体不会再持续承诺该目标,所以 (PGOAL x P Q) 也应为假。
- 当 (Bel x P) 时:
在智能体系统设计中,这种对承诺的精确逻辑定义至关重要。它可以帮助开发者清晰界定智能体的行为边界和决策逻辑。比如在任务管理系统中,智能体可以依据这些规则判断何时继续执行任务、何时放弃任务,确保系统运行的合理性和高效性。同时,在多智能体协作场景下,这种规范的承诺定义有助于智能体之间的协调与交互,避免出现目标冲突或无效的任务执行等情况。
From Commitments to Intentions
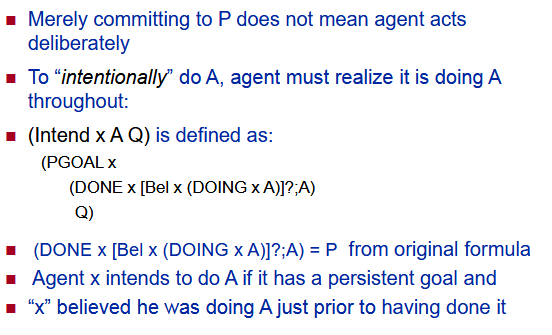
这部分内容主要探讨从 “承诺” 到 “意图” 的转变 。强调仅仅对某事物做出承诺并不等同于智能体是经过审慎思考后采取行动的,而智能体要 “有意地” 执行某行为,需要在整个过程中意识到自己在执行该行为。并且给出了关于智能体 “意图” 的形式化定义。
- 承诺与审慎行动的区别
- 指出仅仅承诺去实现 P ,并不意味着智能体是经过审慎思考后行动的。例如,智能体可能承诺在某个时间点发送消息,但这并不一定表示它在执行发送动作时是经过深思熟虑的,可能只是按照既定程序执行,没有深入思考行为的意义和后果等。
- “有意地” 行动的条件
- 智能体要 “有意地” 去做 A ,它必须在整个过程中意识到自己正在做 A 。比如智能体在执行救援任务(A )时,它要清楚地知道自己在进行救援相关的一系列操作,而不是机械地执行指令。
- (Intend x A Q) 的定义
- 基于持久目标(PGOAL):(PGOAL x (DONE x [Bel x (DOING x A)]?;A) Q) ,这里首先基于前面提到的持久目标(PGOAL)概念。其中 (DONE x [Bel x (DOING x A)]?;A) 是对行为 A 的一种描述。
- 行为状态判断:(DONE x [Bel x (DOING x A)]?;A) 可以理解为,智能体 x 在执行完某个行为后(DONE ),会依据自己是否相信正在做 A(Bel x (DOING x A) )来决定下一步动作(这里用?;A 表示一种条件性的后续行为 )。并且将这个与目标相关的表达式代入到持久目标(PGOAL)的框架中,与条件 Q 一起构成对智能体意图的定义。
- 举例说明:假设智能体 x 的目标是救援(A ),在救援过程中,它会不断判断自己是否确实在进行救援行动(Bel x (DOING x A) ),如果它相信自己在救援,就继续按照救援相关的流程执行(?;A 中的后续动作 ),同时结合持久目标和条件 Q ,就构成了它 “意图” 进行救援的完整逻辑。
- 意图形成的条件补充
- 智能体 x 有意图去做 A ,需要满足它有一个持久目标,并且在执行完 A 之前,它相信自己正在做 A 。这进一步明确了意图形成的具体条件,强调了智能体在行为过程中的认知状态对于意图形成的重要性。
在智能体的行为建模和决策分析中,这种对 “意图” 的精确界定很关键。有助于开发者更准确地理解智能体的行为动机和决策逻辑,从而优化智能体系统的设计。比如在智能机器人的任务执行场景中,通过判断机器人的意图,可以更好地预测其行为,以及在多智能体协作时,能依据意图来协调它们之间的行动,避免冲突,提高协作效率。
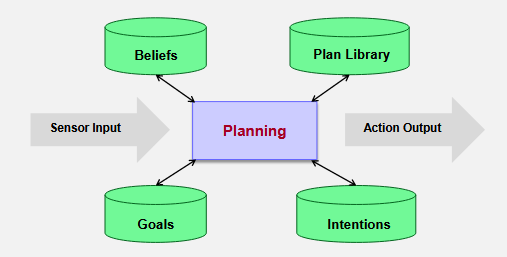
BDI Agent架构
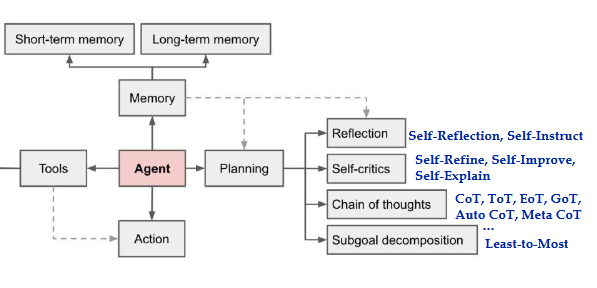
LLM驱动的自主智能体
参考资料
UCAS研究生课程《多智能体系统》



















 444
444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











