







【FOC控制】英飞凌TC264无刷驱动方案simplefoc移植(5)-磁编码器移植
经过测试发现霍尔编码器的效果不太行,因为霍尔编码器读到的角度是离散的,导致由角度算得的速度也是离散的,二使用simplefoc最关键的数据就是角度和速度,所以我决定使用磁编码器完成下面的操作。
关于霍尔编码器的移植可以参考我之前的文章
一、【FOC控制】英飞凌TC264无刷驱动方案simplefoc移植(1)-霍尔编码器移植
二、 逐飞科技TC264开源库
一、编码器选择
这里选用的一款常见的磁编码器,这款编码器在simplefoc的库中,arduino中比较常见。
引脚图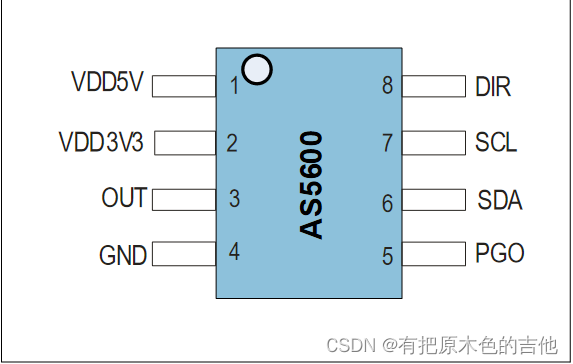
引脚含义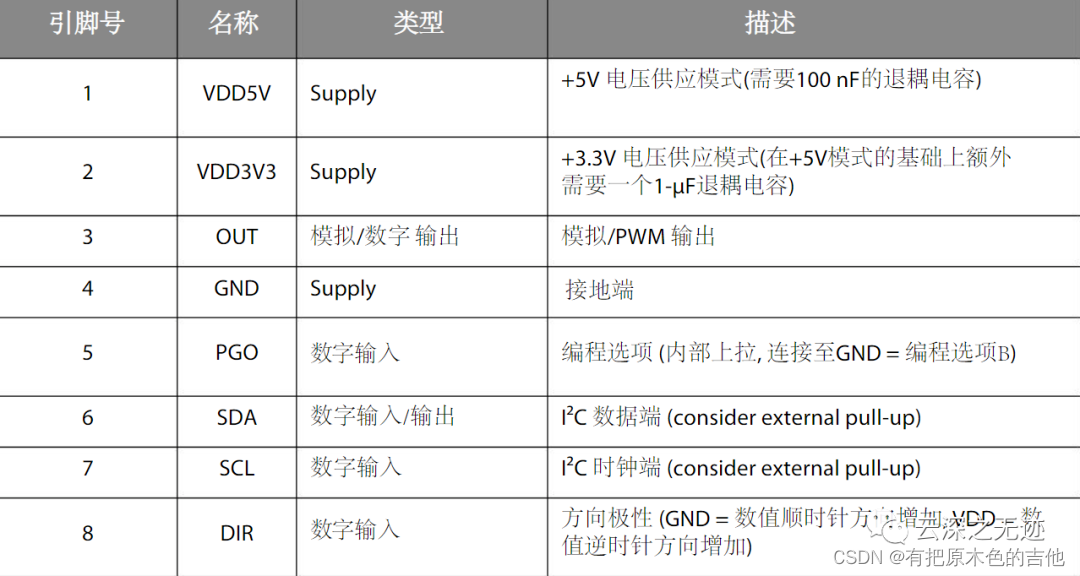
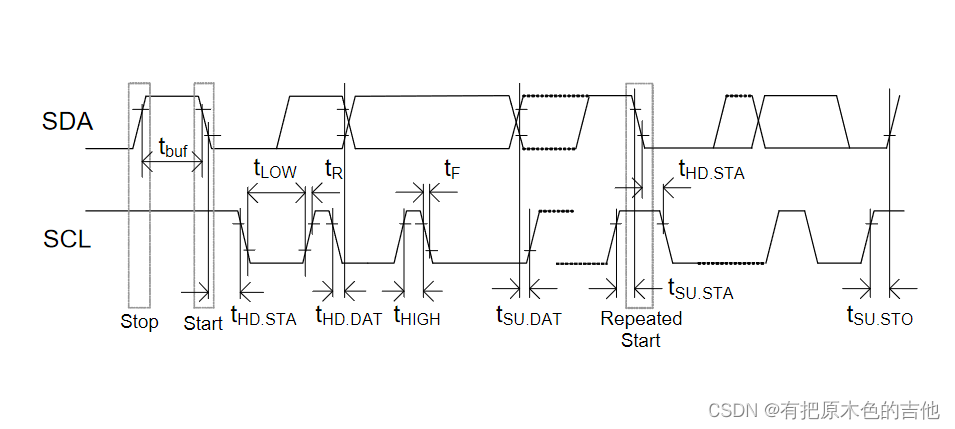
二、通讯方式 I²C接口
AS5600支持双线快速模式加I²C-slave
AS5600始终作为I²C总线上的从设备运行。通过开路漏极I/O连接到总线SDA和输入SC
主机MCU(主)启动数据传输,AS5600的地址是0x36(二进制的,0110110)。
三、TC264测试全部程序
3-1初始化定义
宏定义数据:
包括设备的地址,磁编码器的线数,角度寄存器的高位,角度寄存器的低位。
全局变量:
调用所需的函数:
/******************************************************************************/
#define Slave_Addr 0x36
#define AS5600_CPR 4096
#define RAW_Angle_Hi 0x0C
#define RAW_Angle_Lo 0x0D
/******************************************************************************/
extern long cpr; //电机极对数
extern float full_rotation_offset;//周期角度 圈数
extern long _angle_data_prev;// 更新角度时的前一次角度数据
extern unsigned long velocity_calc_timestamp;//前一次计算的速度的时刻
extern float _angle_prev;//更新速度时的前一次角度
/******************************************************************************/
void AS5600_Init ( void );
float as5600_getAngle(void);
float as5600_getVelocity(void);
/******************************************************************************/
3-2初始化函数
iic总线初始化,这里使用的软件iic初始化,软件iic的程序在展示。
清除圈数和角度数据
void AS5600_Init ( void )
{
IIC_Init();
_angle_data_prev = 0;
full_rotation_offset = 0;
velocity_calc_timestamp=0;
cpr=AS5600_CPR;
}
3-3 as5600原始数据读取
读取原始数据的时候,直接读取从设备中寄存器中的数据,寄存器的地址 RAW_Angle_Hi 0x0C RAW_Angle_Low 0x0D
因为iic总线一次读的数据是八位的,而实际的角度数据是一个十六位的数据,所以我们只需要读取两次iic总线的数据,然后通过移位加或的操作(dh<<8)+dl就可以得到原始数据了。
/***************************************************************************/
uint8 AS5600_ReadOneByte(uint8 addr)
{
uint8 temp;
IIC_Start();
IIC_SendByte(Slave_Addr<<1);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte((Slave_Addr<<1)+1);
IIC_WaitAck();
temp=IIC_ReadByte(0);
IIC_Stop();
return temp;
}
/***************************************************************************/
uint16 AS5600_ReadRawAngleTwo(void)
{
uint8 dh,dl;
IIC_Start();
IIC_SendByte(Slave_Addr<<1);
IIC_WaitAck();
IIC_SendByte(RAW_Angle_Hi);
IIC_WaitAck();
IIC_Start();
IIC_SendByte((Slave_Addr<<1)+1);
IIC_WaitAck();
dh=IIC_ReadByte(1); //1-ack for next byte
dl=IIC_ReadByte(0); //0-end trans
IIC_Stop();
return ((dh<<8)+dl);
}
/***************************************************************************/
3-5角度解算
角度解算的逻辑是,先读取编码器原始数据,然后计算角度的变化量,如果角度的变化量fabs(d_angle) > (0.8*cpr),那么这个时候就认为磁编码器又转过了一圈。
磁编码器一般为增量式编码器,即从0->4096->0,会有一个4096的跳变,二计算角度需要将这个变化检测出来。
最后就是通过计算得出角度,注意此时的单位为弧度!!!!
/******************************************************************************/
float as5600_getAngle(void)
{
float angle_data,d_angle;
float return_speed;
angle_data = AS5600_ReadRawAngleTwo();
// tracking the number of rotations
// in order to expand angle range form [0,2PI] to basically infinity
d_angle = angle_data - _angle_data_prev;
// if overflow happened track it as full rotation
if(fabs(d_angle) > (0.8*cpr) ) full_rotation_offset += d_angle > 0 ? -_2PI : _2PI;
// save the current angle value for the next steps
// in order to know if overflow happened
_angle_data_prev = angle_data;
// return the full angle
// (number of full rotations)*2PI + current sensor angle
// printf ( "angle:%0.2f,%0.2f, ", angle_data,d_angle);
return_speed = (full_rotation_offset + (( angle_data / (float)cpr) * _2PI)) ;
return return_speed;
}
3-6速度解算
速度的计算核心就是,得到两次的角度数据,然后除以时间。
时间的获取源自逐飞的#include <zf_stm_systick.h>文件中,直接调用即可
******************************************************************************/
// Shaft velocity calculation
float as5600_getVelocity(void)
{
unsigned long now_us;
float Ts, angle_c, vel;
// calculate sample time
now_us = systick_getval_us(STM0);//_micros();
if(now_us<velocity_calc_timestamp)Ts = (float)(velocity_calc_timestamp - now_us)/9*1e-6;
else
Ts = (float)(0xFFFFFF - now_us + velocity_calc_timestamp)/9*1e-6;
// quick fix for strange cases (micros overflow)
if(Ts == 0 || Ts > 0.5) Ts = 1e-3;
// current angle
angle_c = as5600_getAngle();
// velocity calculation
vel = (angle_c - _angle_prev)/Ts;
// save variables for future pass
_angle_prev = angle_c;
velocity_calc_timestamp = now_us;
return vel;
}
/******************************************************************************/
3-7速度滤波解算
速度滤波主要采用低通滤波器实现
float LPF_velocity(float x)
{
y = 0.7*y_vel_prev + 0.3*x;
y_vel_prev=y;
return y;
}
sensor_direction是电机转向的方向 ,该函数返回滤波之后的速度
// shaft velocity calculation
float shaftVelocity(void)
{
float as_speed,lpf_speed;
as_speed = as5600_getVelocity();
// if no sensor linked return previous value ( for open loop )
//if(!sensor) return shaft_velocity;
lpf_speed = sensor_direction*LPF_velocity(as_speed);
// printf ( "angle:%0.2f,%0.2f\n", as_speed,lpf_speed);
return lpf_speed;
}
3-8软件IIC代码
myiic.h
#include "zf_gpio.h"
/* 注意 IIC总线规定,IIC空闲时 SCL和SDA都为高电平 最好外部上拉(一定不能下拉) */
/* 模拟 IIC需要注意,IIC地址左移一位 例如MPU6050 模拟就是地址 0xD0 */
/* 想换用别的IO 直接修改宏定义 SOFT_IIC_SCL_PIN 、 SOFT_IIC_SDA_PIN 即可 */
#define IIC_SCL_PIN P33_11 /*!< P13_1 作为 SCL */
#define IIC_SDA_PIN P33_5 /*!< P13_2 作为 SDA */
#define SDA_OUT gpio_dir (IIC_SDA_PIN, GPO, PUSHPULL) //输出方向
#define SDA_IN gpio_dir (IIC_SDA_PIN, GPI, NO_PULL) //输入方向
#define IIC_SCL_INIT gpio_init (IIC_SCL_PIN, GPO, 1, PUSHPULL);
#define IIC_SDA_INIT gpio_init (IIC_SDA_PIN, GPO, 1, PUSHPULL);
#define IIC_SCL_H gpio_set (IIC_SCL_PIN, 1) //IO口输出高电平
#define IIC_SCL_L gpio_set (IIC_SCL_PIN, 0) //IO口输出低电平
#define IIC_SDA_H gpio_set (IIC_SDA_PIN, 1) //IO口输出高电平
#define IIC_SDA_L gpio_set (IIC_SDA_PIN, 0) //IO口输出低电平
#define IIC_SDA_READ gpio_get(IIC_SDA_PIN)
void IIC_Init(void);
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
unsigned char IIC_WaitAck(void); //IIC等待ACK信号
void IIC_SendByte(unsigned char data_t); //IIC发送一个字节
unsigned char IIC_ReadByte(unsigned char ack); //IIC读取一个字节
unsigned char IIC_ReadByteFromSlave(unsigned char I2C_Addr,unsigned char reg,unsigned char *buf);
unsigned char IIC_ReadMultByteFromSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char *data_t);
unsigned char IIC_WriteByteToSlave(unsigned char I2C_Addr,unsigned char reg,unsigned char buf);
unsigned char IIC_WriteMultByteToSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char* data_t);
myiic.c
/*************************************************************************
* 函数名称:IIC延时
* 功能说明:ADC初始化函数
* 参数说明:us : 延时时间
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:iic_delay(1); //简单的延时
* 内部调用 修改这里可以调整IIC速率
*************************************************************************/
void iic_delay()
{
/* 200MHz 系统时钟下 模拟IIC速度为 400Khz */
unsigned char i = 0;
for(i = 0; i < 30; i++) //修改这里可以调整IIC速率
{
__asm("NOP"); /* delay */
}
}
/*************************************************************************
* 函数名称:void IIC_Init(void)
* 功能说明:模拟IIC初始化
* 参数说明:无
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:IIC_Init(); //模拟IIC初始化 IIC管脚在LQ_SOFTI2C.h中定义
*************************************************************************/
void IIC_Init(void)
{
IIC_SCL_INIT;
IIC_SDA_INIT;
IIC_SCL_H;
IIC_SDA_H;
}
/*************************************************************************
* 函数名称:void IIC_Start(void)
* 功能说明:模拟IIC起始信号
* 参数说明:无
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:IIC_Start();
*************************************************************************/
void IIC_Start(void)
{
SDA_OUT; //sda线输出
IIC_SDA_H;
IIC_SCL_H;
iic_delay();
iic_delay();
iic_delay();
iic_delay();
iic_delay();
IIC_SDA_L; //START:when CLK is high,DATA change form high to low
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_L; //钳住I2C总线,准备发送或接收数据
}
/*************************************************************************
* 函数名称:void IIC_Stop(void)
* 功能说明:模拟IIC停止信号
* 参数说明:无
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:IIC_Stop();
*************************************************************************/
void IIC_Stop(void)
{
SDA_OUT; //sda线输出
IIC_SCL_L;
IIC_SDA_L; //STOP:when CLK is high DATA change form low to high
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_H;
iic_delay();
iic_delay();
iic_delay();
IIC_SDA_H; //发送I2C总线结束信号
iic_delay();
}
/*************************************************************************
* 函数名称:unsigned char IIC_WaitAck(void)
* 功能说明:模拟IIC等待应答信号
* 参数说明:无
* 函数返回:1,接收应答失败 0,接收应答成功
* 修改时间:2020年3月10日
* 应用举例:内部调用 有效应答:从机第9个 SCL=0 时 SDA 被从机拉低,并且 SCL = 1时 SDA依然为低
*************************************************************************/
unsigned char IIC_WaitAck(void)
{
unsigned char ucErrTime=0;
SDA_IN; //SDA设置为输入 (从机给一个低电平做为应答)
IIC_SDA_H;iic_delay();
IIC_SCL_H;iic_delay();
while(IIC_SDA_READ)
{
ucErrTime++;
if(ucErrTime>100)
{
IIC_Stop();
return 1;
}
}
IIC_SCL_L; //时钟输出0
return 0;
}
/*************************************************************************
* 函数名称:void IIC_Ack(void)
* 功能说明:模拟IIC产生ACK应答
* 参数说明:无
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:内部调用 主机接收完一个字节数据后,主机产生的ACK通知从机一个字节数据已正确接收
*************************************************************************/
void IIC_Ack(void)
{
IIC_SCL_L;
SDA_OUT;
IIC_SDA_L;
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_H;
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_L;
}
/*************************************************************************
* 函数名称:void IIC_NAck(void)
* 功能说明:模拟IIC不产生ACK应答
* 参数说明:无
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:内部调用 主机接收完最后一个字节数据后,主机产生的NACK通知从机发送结束,释放SDA,以便主机产生停止信号
*************************************************************************/
void IIC_NAck(void)
{
IIC_SCL_L;
SDA_OUT;
IIC_SDA_H;
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_H;
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_L;
}
/*************************************************************************
* 函数名称:void IIC_SendByte(unsigned char data_t)
* 功能说明:模拟IIC发送一个字节
* 参数说明:data : 发送的字节
* 函数返回:无
* 修改时间:2020年3月10日
* 应用举例:IIC_SendByte(0x12);
*************************************************************************/
void IIC_SendByte(unsigned char data_t)
{
unsigned char t;
SDA_OUT;
IIC_SCL_L; //拉低时钟开始数据传输
for(t=0;t<8;t++)
{
// IIC_SDA_READ = data_t&0x80;
if(data_t&0x80)
{
IIC_SDA_H;
}
else
{
IIC_SDA_L;
}
IIC_SCL_H;;
iic_delay();
data_t<<=1;
iic_delay();
iic_delay();
IIC_SCL_L;
iic_delay();
}
iic_delay();
}
/*************************************************************************
* 函数名称:unsigned char IIC_ReadByte(unsigned char ack)
* 功能说明:模拟IIC读取一个字节
* 参数说明:ack=1 时,主机数据还没接收完 ack=0 时主机数据已全部接收完成
* 函数返回:接收到的字节
* 修改时间:2020年3月10日
* 应用举例:IC_ReadByte(0x12);
*************************************************************************/
unsigned char IIC_ReadByte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN; //SDA设置为输入模式 等待接收从机返回数据
for(i=0;i<8;i++ )
{
IIC_SCL_L;
iic_delay();
iic_delay();
iic_delay();
IIC_SCL_H;
receive<<=1;
if(IIC_SDA_READ)receive++; //从机发送的电平
iic_delay();
}
if(ack)
IIC_Ack(); //发送ACK
else
IIC_NAck(); //发送nACK
return receive;
}
/*************************************************************************
* 函数名称:void ADC_init(void)
* 功能说明:模拟IIC读取指定设备 指定寄存器的一个值
* 参数说明:
* @param I2C_Addr 目标设备地址
* @param reg 目标寄存器
* @param buf 存放读出字节
* 函数返回:1失败 0成功
* 修改时间:2020年3月10日
* 应用举例:IIC_ReadByteFromSlave(0xD0, 0x75, &data); //读 IIC地址为 0xD0器件(MPU6050)寄存器0x75
*************************************************************************/
unsigned char IIC_ReadByteFromSlave(unsigned char I2C_Addr,unsigned char reg,unsigned char *buf)
{
IIC_Start();
IIC_SendByte(I2C_Addr); //发送从机地址
if(IIC_WaitAck()) //如果从机未应答则数据发送失败
{
IIC_Stop();
return 1;
}
IIC_SendByte(reg); //发送寄存器地址
IIC_WaitAck();
IIC_Start();
IIC_SendByte(I2C_Addr+1); //进入接收模式
IIC_WaitAck();
*buf=IIC_ReadByte(0);
IIC_Stop(); //产生一个停止条件
return 0;
}
/*************************************************************************
* 函数名称:void ADC_init(void)
* 功能说明:模拟IIC写指定设备 指定寄存器的一个值
* 参数说明:
* @param I2C_Addr 目标设备地址
* @param reg 目标寄存器
* @param data 写入的数据
* 函数返回:1失败 0成功
* 修改时间:2020年3月10日
* 应用举例:IIC_ReadByteFromSlave(0xD0, 0X6B, 0X80); //IIC地址为 0xD0器件(MPU6050)寄存器0x6B 写入0x80
*************************************************************************/
unsigned char IIC_WriteByteToSlave(unsigned char I2C_Addr,unsigned char reg,unsigned char data_t)
{
IIC_Start();
IIC_SendByte(I2C_Addr); //发送从机地址
if(IIC_WaitAck())
{
IIC_Stop();
return 1; //从机地址写入失败
}
IIC_SendByte(reg); //发送寄存器地址
IIC_WaitAck();
IIC_SendByte(data_t);
if(IIC_WaitAck())
{
IIC_Stop();
return 1; //数据写入失败
}
IIC_Stop(); //产生一个停止条件
//return 1; //status == 0;
return 0;
}
/*************************************************************************
* 函数名称:unsigned char IIC_ReadMultByteFromSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char *data_t)
* 功能说明:模拟IIC读取指定设备 指定寄存器的n个值
* 参数说明:
* @param dev 目标设备地址
* @param reg 目标寄存器
* @param length 读取长度
* @param data 存放读出数据
* 函数返回:1失败 0成功
* 修改时间:2020年3月10日
* 应用举例:IIC_ReadByteFromSlave(0xD0, 0X3B, 14, &data); //读 14个字节
*************************************************************************/
unsigned char IIC_ReadMultByteFromSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char *data_t)
{
unsigned char count = 0;
unsigned char temp;
IIC_Start();
IIC_SendByte(dev); //发送从机地址
if(IIC_WaitAck())
{
IIC_Stop();
return 1; //从机地址写入失败
}
IIC_SendByte(reg); //发送寄存器地址
IIC_WaitAck();
IIC_Start();
IIC_SendByte(dev+1); //进入接收模式
IIC_WaitAck();
for(count=0;count<length;count++)
{
if(count!=(length-1))
temp = IIC_ReadByte(1); //带ACK的读数据
else
temp = IIC_ReadByte(0); //最后一个字节NACK
data_t[count] = temp;
}
IIC_Stop(); //产生一个停止条件
//return count;
return 0;
}
/*************************************************************************
* 函数名称:unsigned char IIC_WriteMultByteToSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char* data_t)
* 功能说明:模拟IIC写指定设备 指定寄存器的n个值
* 参数说明:
* @param dev 目标设备地址
* @param reg 目标寄存器
* @param length 写入长度
* @param data 存放写入数据
* 函数返回: 1失败 0成功
* 修改时间:2020年3月10日
* 应用举例:IIC_WriteMultByteToSlave(0xD0, 0X6B, 1, 0X80); //向寄存器0x6B写入0x80
*************************************************************************/
unsigned char IIC_WriteMultByteToSlave(unsigned char dev, unsigned char reg, unsigned char length, unsigned char* data_t)
{
unsigned char count = 0;
IIC_Start();
IIC_SendByte(dev); //发送从机地址
if(IIC_WaitAck())
{
IIC_Stop();
return 1; //从机地址写入失败
}
IIC_SendByte(reg); //发送寄存器地址
IIC_WaitAck();
for(count=0;count<length;count++)
{
IIC_SendByte(data_t[count]);
if(IIC_WaitAck()) //每一个字节都要等从机应答
{
IIC_Stop();
return 1; //数据写入失败
}
}
IIC_Stop(); //产生一个停止条件
return 0;
}
四、总结
最后本次关于tc264系列移植磁编码器的源代码已经完全开放,但是需要注意的是,磁铁的选择与安装,尽量选择 **圆形强力磁铁 高强度薄钕铁贴片 **
因为磁编码器的关键还是去检测磁场的变化,所以当有代码无法显示的时候,先可以检测硬件设备。














 6301
6301











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









