






基于MATLAB的卡尔曼滤波仿真
卡尔曼滤波是一种用于状态估计和信号去噪的强大工具。它在许多领域,如控制系统、信号处理和机器学习中都有广泛的应用。本文将介绍如何使用MATLAB进行卡尔曼滤波的教学仿真,并提供示例代码。
卡尔曼滤波简介
卡尔曼滤波是一种递归的状态估计方法,通过考虑系统的状态方程和测量方程,可以估计出系统的状态,同时考虑了过去的测量值和模型的噪声。
卡尔曼滤波的核心思想是通过不断地更新估计值,将过去的信息与新的测量值相结合,以获得更准确的估计。这使得卡尔曼滤波在噪声环境下具有出色的性能。
MATLAB中的卡尔曼滤波仿真
首先,我们将使用MATLAB来创建一个简单的卡尔曼滤波器并对一个具有噪声的信号进行估计和去噪。在这个示例中,我们将使用一维信号和一维状态来简化问题。
步骤1:生成模拟信号
首先,我们生成一个模拟的带噪声的信号,这将成为我们的输入数据。
% 生成模拟信号
t = 0:0.1:10;
true_signal = sin(t); % 真实信号
noise = 0.5 * randn(size(t)); % 高斯噪声
measured_signal = true_signal + noise; % 带噪声的测量信号
步骤2:初始化卡尔曼滤波器
接下来,我们初始化卡尔曼滤波器的参数和初始估计。
% 初始化卡尔曼滤波器参数
A = 1; % 状态转移矩阵
H = 1; % 观测矩阵
Q = 0.01; % 过程噪声协方差
R = 0.5; % 观测噪声协方差
% 初始估计
x_est = 0; % 状态估计
P_est = 1; % 估计协方差
步骤3:卡尔曼滤波主循环
现在,我们进入卡尔曼滤波的主循环,用于估计信号的状态和去噪。
% 卡尔曼滤波主循环
filtered_signal = zeros(size(t)); % 用于存储滤波后的信号
for i = 1:length(t)
% 预测步骤
x_pred = A * x_est;
P_pred = A * P_est * A' + Q;
% 更新步骤
K = P_pred * H' / (H * P_pred * H' + R);
x_est = x_pred + K * (measured_signal(i) - H * x_pred);
P_est = (1 - K * H) * P_pred;
% 存储估计值
filtered_signal(i) = x_est;
end
步骤4:绘制结果
最后,我们绘制原始信号、带噪声的信号和卡尔曼滤波后的估计。
% 绘制结果
figure;
plot(t, true_signal, 'g', 'LineWidth', 2, 'DisplayName', '真实信号');
hold on;
plot(t, measured_signal, 'b', 'LineWidth', 1, 'DisplayName', '带噪声信号');
plot(t, filtered_signal, 'r', 'LineWidth', 1.5, 'DisplayName', '滤波后信号');
xlabel('时间');
ylabel('信号值');
legend;
title('卡尔曼滤波示例');
grid on;
以上是一个简单的一维卡尔曼滤波示例,用于估计和去噪具有噪声的信号。你可以根据需要进行扩展,以处理更复杂的问题和多维数据。
希望这个示例对你理解卡尔曼滤波在MATLAB中的应用有所帮助。卡尔曼滤波是一个强大的工具,可以在许多应用中提供准确的状态估计和信号去噪。
仿真结果: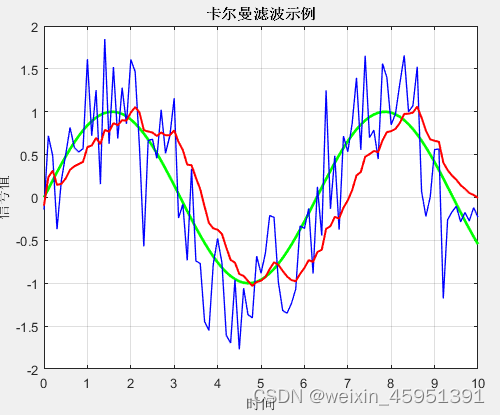















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









