






三个坐标系和运动方程
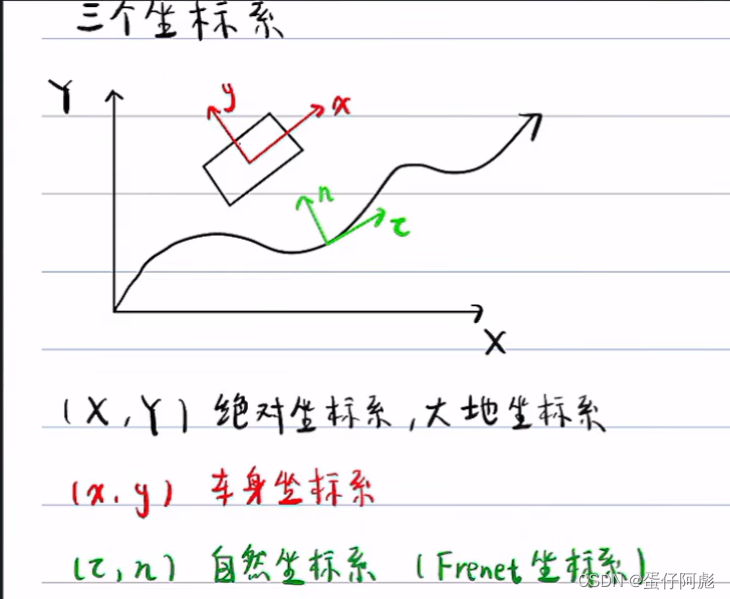
三个坐标系
坐标系是研究数据的参考,汽车分为大地、车身和自然三个坐标系 ,其中自然坐标系可以对纵向和横向运动解耦
运动学方程
主要是几个角度别弄混,横摆角:车身和x方向的夹角、质心侧偏角:质心速度方向和车身的夹角、航向角:质心速度和x 的夹角 、前后轮转角:前后轮转过的角度
低速情况下运动学方程: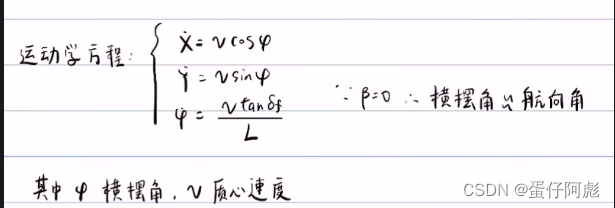
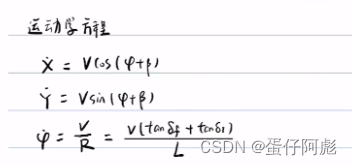
一般情况下运动学方程
坐标系是研究数据的参考,汽车分为大地、车身和自然三个坐标系 ,其中自然坐标系可以对纵向和横向运动解耦
主要是几个角度别弄混,横摆角:车身和x方向的夹角、质心侧偏角:质心速度方向和车身的夹角、航向角:质心速度和x 的夹角 、前后轮转角:前后轮转过的角度
低速情况下运动学方程:
一般情况下运动学方程
 6763
425
511
6763
425
511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























