









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
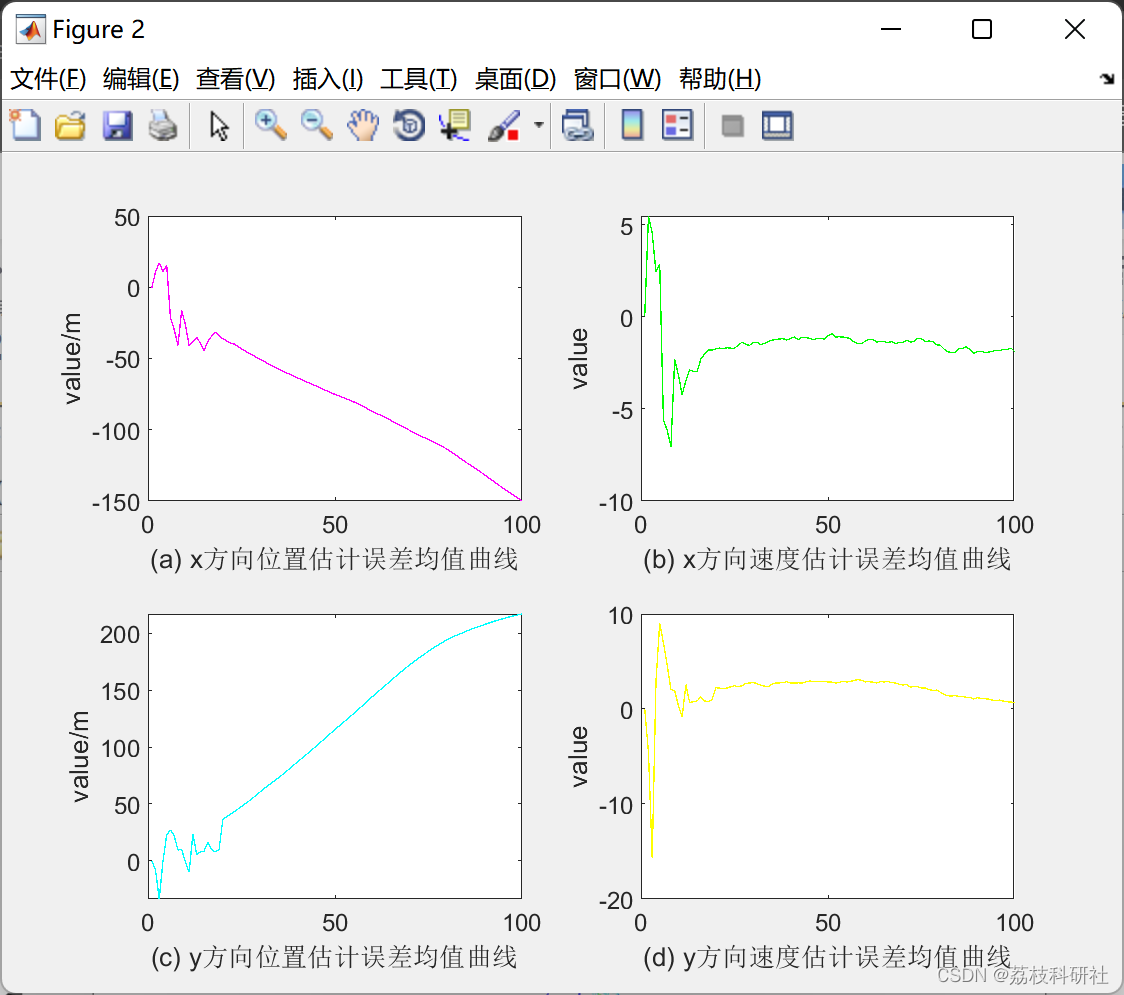
📚2 运行结果



部分代码:
%重要性权值计算
for i=1:N
zPred_pf(:,t,i)=feval('hfun',XparticlePred_pf(:,t,i),x0,y0);
weight(t,i)=(1-eta)*inv(sqrt(2*pi*det(R1)))*exp(-.5*(Z(:,t)...
-zPred_pf(:,t,i))'*inv(R1)*(Z(:,t)-zPred_pf(:,t,i)))...
+eta*inv(sqrt(2*pi*det(R2)))*exp(-.5*(Z(:,t)-...
zPred_pf(:,t,i))'*inv(R2)*(Z(:,t)-zPred_pf(:,t,i)))...
+ 1e-99; %权值计算,为避免权值为0,用1e-99
end
weight(t,:)=weight(t,:)./sum(weight(t,:));%归一化权值
outIndex = randomR(1:N,weight(t,:)'); %随机采样
Xparticle_pf(:,t,:) = XparticlePred_pf(:,t,outIndex);%获取新采样值
%状态估计
mx=mean(Xparticle_pf(1,t,:));
my=mean(Xparticle_pf(3,t,:));
mvx=mean(Xparticle_pf(2,t,:));
mvy=mean(Xparticle_pf(4,t,:));
Xmean_pf(j,:,t)=[mx,mvx,my,mvy]';
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]周航,冯新喜,王蓉.非线性非高斯模型的改进粒子滤波算法[J].信号处理,2012,28(09):1327-1334.















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











