






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源:

摘要:
--对于许多应用领域来说,为了准确模拟物理系统的基本动力学,包括非线性和非高斯性元素变得越来越重要。此外,从存储成本和快速适应不断变化的信号特性的角度来看,在到达数据时在线处理数据通常至关重要。在本文中,我们回顾了非线性/非高斯跟踪问题的最优和次优贝叶斯算法,重点是粒子滤波器。粒子滤波是基于概率密度的点质量(或“粒子”)表示的顺序蒙特卡罗方法,可以应用于任何状态空间模型,并推广传统的卡尔曼滤波方法。在顺序重要性抽样 (SIS) 算法的通用框架内引入了粒子滤波器的几种变体,例如 SIR、ASIR 和 RPF。通过一个说明性示例,对这些进行讨论并与标准 EKF 进行比较。
关键词:
贝叶斯方法 卡尔曼滤波器 蒙特卡洛方法 滤波理论 重要性抽样 状态估计 状态空间方法 跟踪过滤器 卡尔曼滤波 非高斯跟踪问题
原文摘要:
-Increasingly, for many application areas, it is becoming important to include elements of nonlinearity and non-Gaussianity in order to model accurately the underlying dynamics of a physical system. Moreover, it is typically crucial to process data on-line as it arrives, both from the point of view of storage costs as well as for rapid adaptation to changing signal characteristics. In this paper, we review both optimal and suboptimal Bayesian algorithms for nonlinear/non-Gaussian tracking problems, with a focus on particle filters. Particle filters are sequential Monte Carlo methods based on point mass (or "particle") representations of probability densities, which can be applied to any state-space model and which generalize the traditional Kalman filtering methods. Several variants of the particle filter such as SIR, ASIR, and RPF are introduced within a generic framework of the sequential importance sampling (SIS) algorithm. These are discussed and compared with the standard EKF through an illustrative example.
Bayes methods Kalman filters Monte Carlo methods filtering theory importance sampling state estimation state-space methods tracking filters Kalman filtering nonGaussian tracking problems
📚2 运行结果



部分代码:
for i = xi
% for each time step perform a kernel density estimation
den(:,i) = ksdensity(pf.particles(1,:,i), yi,'kernel','epanechnikov');
[~, idx] = max(den(:,i));
% estimate the mode of the density
xhmode(i) = yi(idx);
plot3(repmat(xi(i),length(yi),1), yi', den(:,i));
end
view(3);
box on;
title('Evolution of the state density','FontSize',14)
figure
mesh(xx,yy,den);
title('Evolution of the state density','FontSize',14)
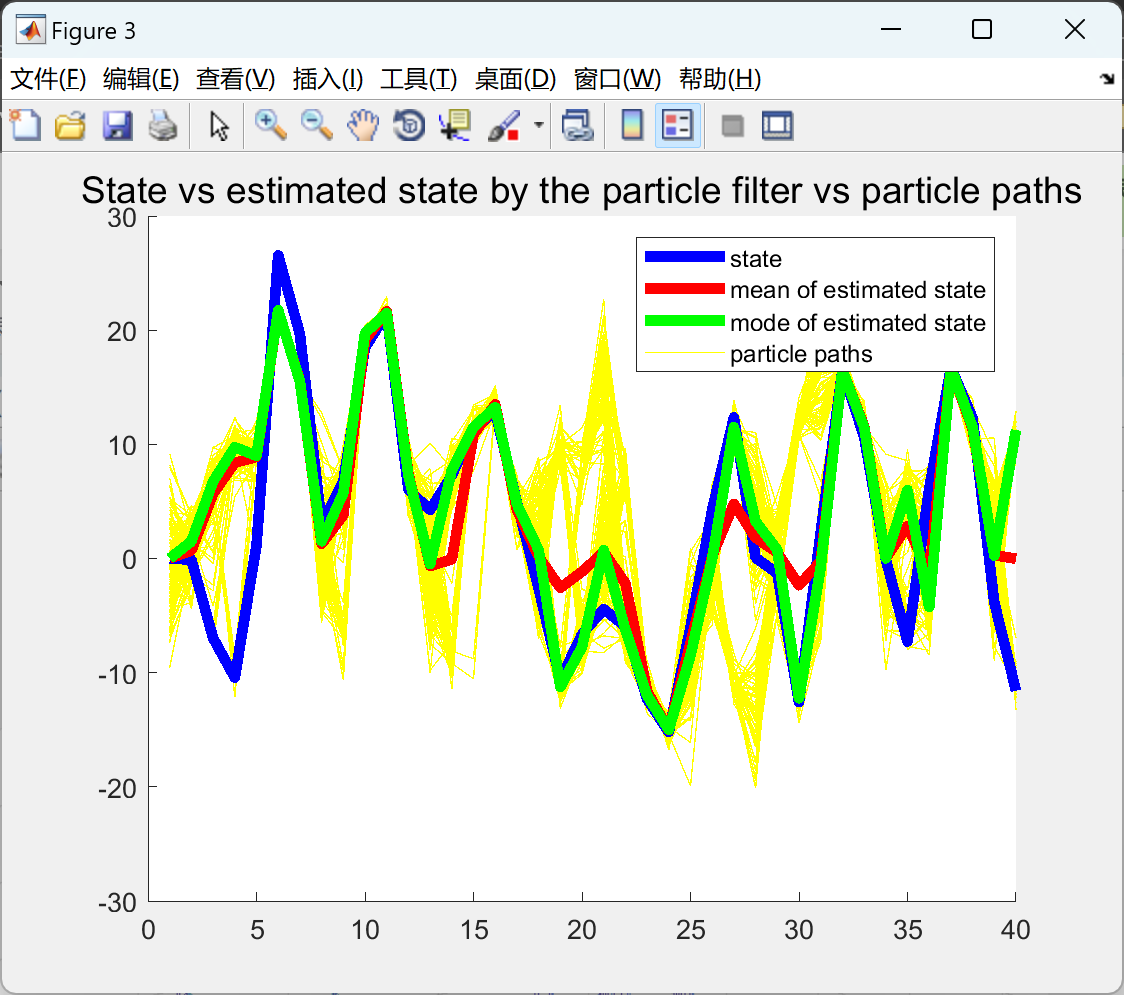
%% plot of the state vs estimated state by the particle filter vs particle paths
figure
hold on;
h1 = plot(1:T,squeeze(pf.particles),'y');
h2 = plot(1:T,x,'b','LineWidth',4);
h3 = plot(1:T,xh,'r','LineWidth',4);
h4 = plot(1:T,xhmode,'g','LineWidth',4);
legend([h2 h3 h4 h1(1)],'state','mean of estimated state','mode of estimated state','particle paths');
title('State vs estimated state by the particle filter vs particle paths','FontSize',14);
%% plot of the observation vs filtered observation by the particle filter
figure
plot(1:T,y,'b', 1:T,yh,'r');
legend('observation','filtered observation');
title('Observation vs filtered observation by the particle filter','FontSize',14);
return;
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Arulampalam et. al. (2002). A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking. IEEE Transactions on Signal Processing. 50 (2). p 174--188
[2]P. Agand, H. D. Taghirad and A. Khaki-Sedigh, "Particle filters for non-Gaussian hunt-crossley model of environment in bilateral teleoperation," 2016 4th International Conference on Robotics and Mechatronics (ICROM), Tehran, Iran, 2016, pp. 512-517, doi: 10.1109/ICRoM.2016.7886794.















 2621
2621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









