






 该博客探讨了机会约束规划(CCP)的概念,特别是当随机变量的精确信息不可得时,如何通过分布鲁棒优化(DRCC)来处理。文章提供了Matlab代码示例,展示了不同方法在处理概率约束优化问题时的性能比较,并引用了相关研究,强调了这一方法在电力系统等领域的数据驱动决策中的重要性。
该博客探讨了机会约束规划(CCP)的概念,特别是当随机变量的精确信息不可得时,如何通过分布鲁棒优化(DRCC)来处理。文章提供了Matlab代码示例,展示了不同方法在处理概率约束优化问题时的性能比较,并引用了相关研究,强调了这一方法在电力系统等领域的数据驱动决策中的重要性。
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
机会约束规划(chance constrained programming简称CCP)也称为概率约束规划,最初由Charnes和 Cooper[1在1958年提出,是针对约束条件中含有随机参数并在一定概率条件满足下的最优化问题.近几十年,机会约束广泛应用于参数不确定的优化和决策问题中.比如,网络优化2]、供应链管理3、生产计划[4和水流箱管理5等.关于CCP的发展情形,感兴趣的读者可参见综述文献[6].机会约束规划的一般形式为:
常规机会约束假设已知随机变量概率分布Р的准确信息.然而,在许多实际应用中随机变量∈ 难以精确预测,仅能够获得其部分信息(如矩和样本信息等).满足这些概率信息的分布构从伏)方法结合.建立在分布不确定集合最环情优L好分布鲁棒优化问题优化思想和随机优化方法结合,建立在分布不确定
鲁棒优化(distributionally robust optimization,简称结合机会约束即为分布鲁棒机会约束优化问题(distributionally robust chance constrainedoptimization program,简称DRCC).
分布鲁棒机会约束优化的一般形式为:

📚2 运行结果
部分代码:
lgd_str = {};
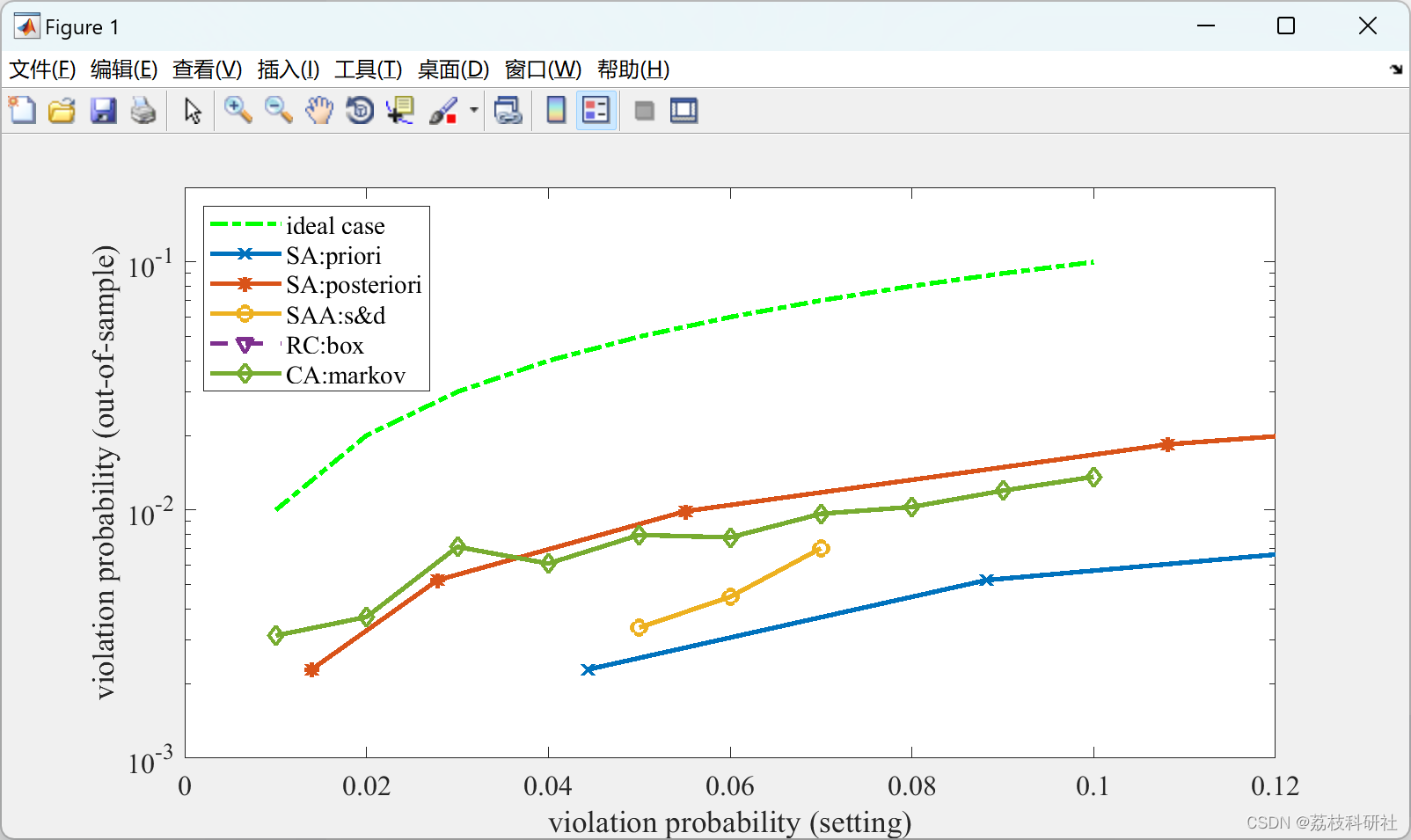
plot(eps_scale,eps_scale,'g-.','LineWidth',2), hold on, lgd_str = [lgd_str,'ideal case'];
plot(nanmean(result_sa.eps_pri,2), nanmean(result_sa.eps_empirical,2),'-x','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:priori'];
plot(nanmean(result_sa.eps_post,2), nanmean(result_sa.eps_empirical,2),'-*','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:posteriori'];
plot(result_saa.epsilons, nanmean(result_saa.eps_empirical,2),'-o','LineWidth',2), hold on, lgd_str = [lgd_str,'SAA:s&d'];
plot(result_rc.eps, nanmean(result_rc.eps_empirical_box,2)*ones(size(result_rc.eps)),'--v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:box'];
% plot(result_rc.eps, nanmean(result_rc.eps_empirical_ball,2),':v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:ball'];
% plot(result_rc.eps, nanmean(result_rc.eps_empirical_ballbox,2),'-v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:ballbox'];
% plot(result_rc.eps, nanmean(result_rc.eps_empirical_budget,2),'-.v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:budget'];
plot(result_ca.eps, nanmean(result_ca.eps_empirical,2),'-d','LineWidth',2), hold on, lgd_str = [lgd_str,'CA:markov'];
legend(lgd_str,'Location','NorthWest')
set(gca,'yscale','log')
% xlim([0,0.9]), ylim([1e-4 10])
xlim([0,0.12]), ylim([1e-3 0.2])
xlabel('violation probability (setting)'),ylabel('violation probability (out-of-sample)')
set(gca,'FontSize',12,'fontname','times')
print(f_eps,'-depsc','-painters',[casename,'-all-methods-epsilon.eps'])
f_eps_err = figure('Position', fig_size);
lgd_str = {};
% plot(eps_scale,eps_scale,'g-.','LineWidth',2), hold on, lgd_str = [lgd_str,'ideal case'];
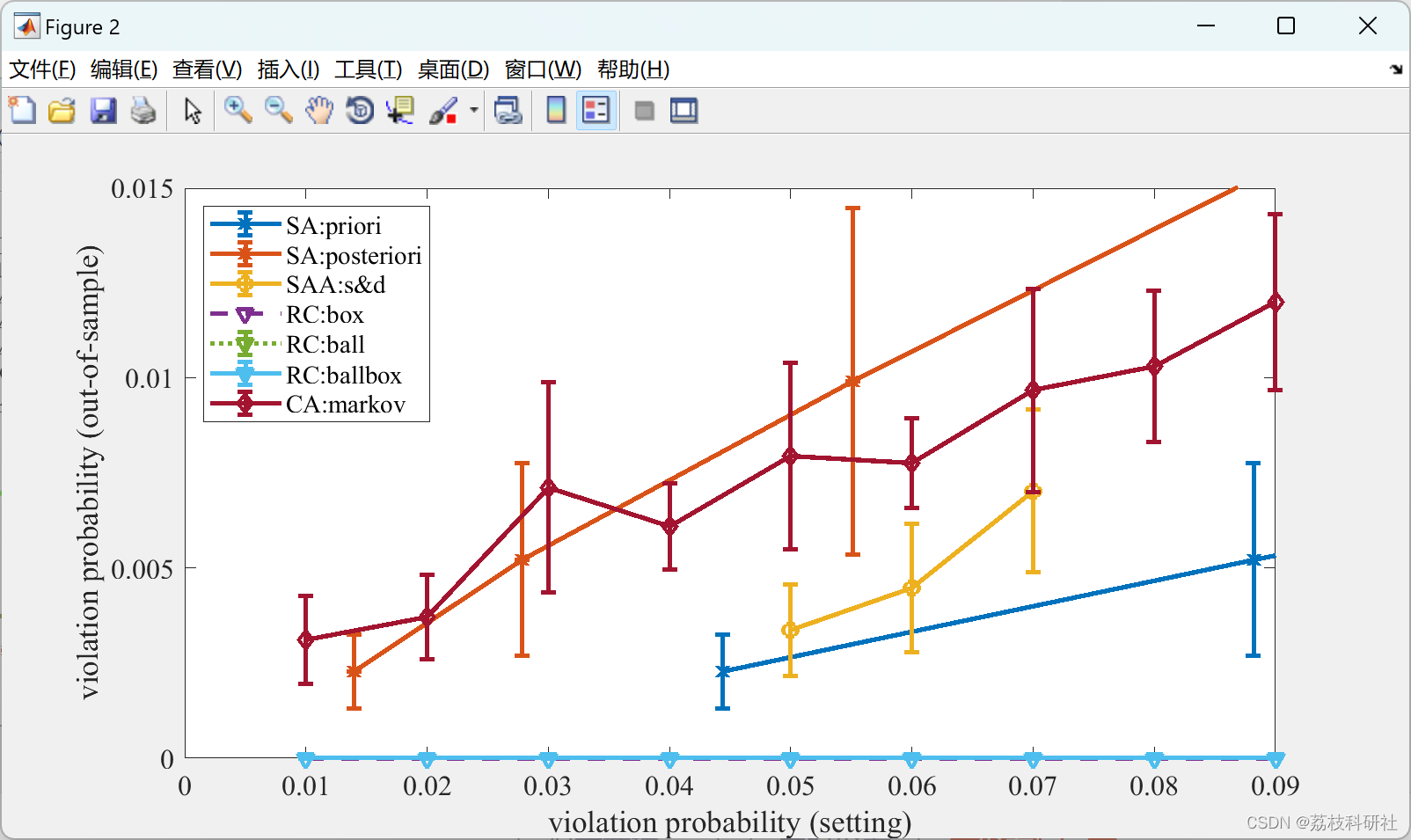
errorbar(nanmean(result_sa.eps_pri,2), nanmean(result_sa.eps_empirical,2),nanstd(result_sa.eps_empirical,[],2),'-x','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:priori'];
errorbar(nanmean(result_sa.eps_post,2), nanmean(result_sa.eps_empirical,2),nanstd(result_sa.eps_empirical,[],2),'-*','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:posteriori'];
errorbar(result_saa.epsilons, nanmean(result_saa.eps_empirical,2),nanstd(result_saa.eps_empirical,[],2),'-o','LineWidth',2), hold on, lgd_str = [lgd_str,'SAA:s&d'];
plot(result_rc.eps, nanmean(result_rc.eps_empirical_box,2)*ones(size(result_rc.eps)),'--v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:box'];
errorbar(result_rc.eps, nanmean(result_rc.eps_empirical_ball,2),nanstd(result_rc.eps_empirical_ball,[],2),':v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:ball'];
errorbar(result_rc.eps, nanmean(result_rc.eps_empirical_ballbox,2),nanstd(result_rc.eps_empirical_ballbox,[],2),'-v','LineWidth',2), hold on, lgd_str = [lgd_str,'RC:ballbox'];
% errorbar(result_rc.eps, nanmean(result_rc.eps_empirical_budget,2),nanstd(result_rc.eps_empirical_budget,[],2),'-.v','LineWidth',2), hold on,
errorbar(result_ca.eps, nanmean(result_ca.eps_empirical,2), nanstd(result_ca.eps_empirical,[],2),'-d','LineWidth',2), hold on, lgd_str = [lgd_str,'CA:markov'];
legend(lgd_str,'Location','NorthWest')
% xlim([0,0.12])
xlim([0,0.09])
% ylim([0,0.09])
xlabel('violation probability (setting)'),ylabel('violation probability (out-of-sample)')
set(gca,'FontSize',12,'fontname','times')
print(f_eps_err,'-depsc','-painters',[casename,'-all-methods-epsilon-errorbar.eps'])
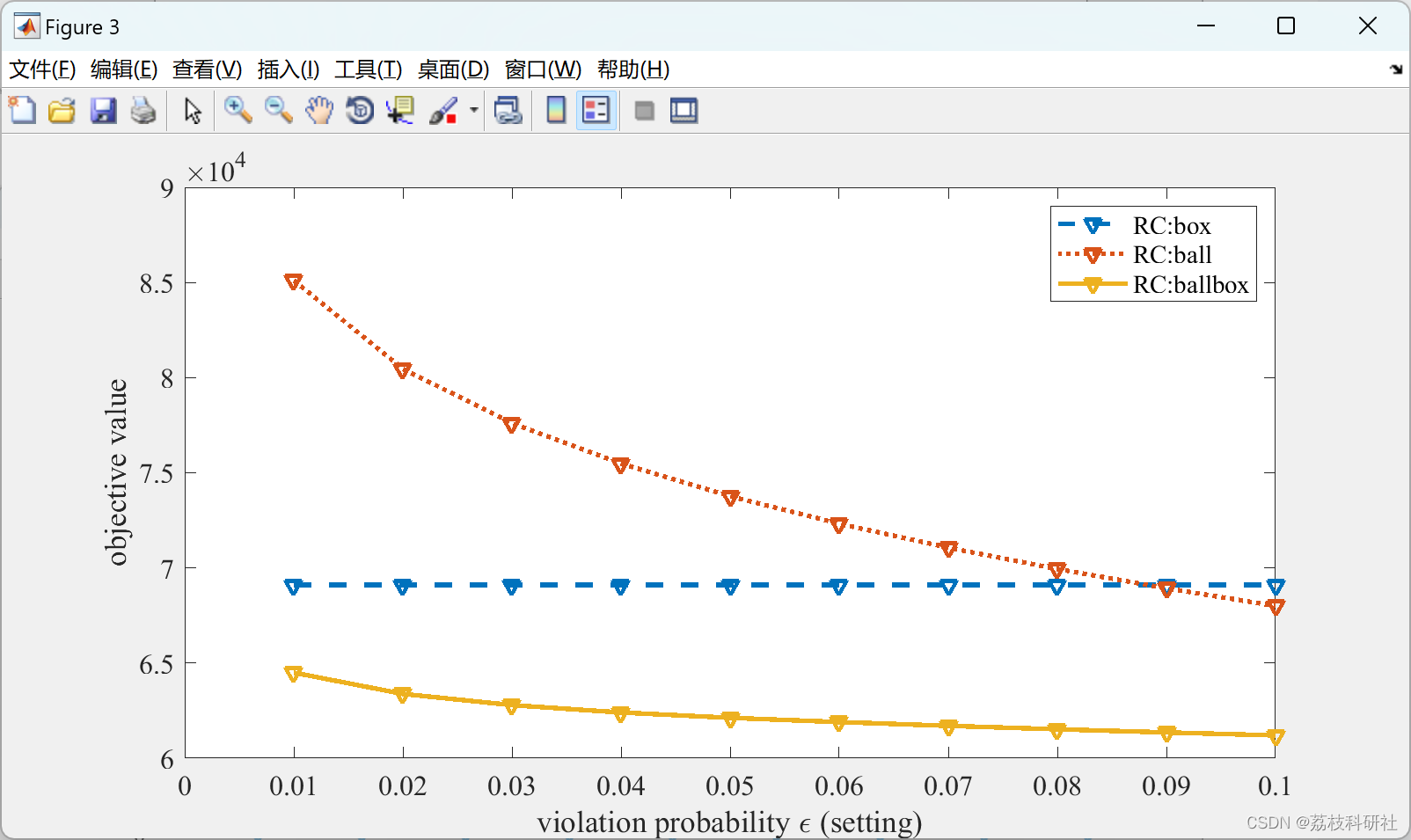
f_obj = figure('Position', fig_size);
lgd_str = {};
% plot(result_lb.epsilons, result_lb.obj_low, ':^'), hold on,
% plot(nanmean(result_sa.eps_pri,2), nanmean(result_sa.obj,2),'-x','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:priori'];
% plot(nanmean(result_sa.eps_post,2), nanmean(result_sa.obj,2),'-*','LineWidth',2), hold on, lgd_str = [lgd_str,'SA:posteriori'];
% plot(result_saa.epsilons, nanmean(result_saa.obj,2),'-o','LineWidth',2), hold on, lgd_str = [lgd_str,'SAA:s&d'];
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]耿晓路,童小娇.分布鲁棒机会约束优化问题的研究[J].运筹学学报,2020,24(01):115-130.DOI:10.15960/j.cnki.issn.1007-6093.2020.01.009.
[2]article{geng2019data,
title={Data-driven decision making in power systems with probabilistic guarantees: Theory and applications of chance-constrained optimization},
author={Geng, Xinbo and Xie, Le},
journal={Annual Reviews in Control},
year={2019},
publisher={Elsevier}
}


















 562
562

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











