






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
【数据融合】基于KF/UKF/EKF/PF/FKF/DKF卡尔曼滤波KF/无迹卡尔曼滤波UKF/拓展卡尔曼滤波数据融合研究(Matlab代码实现)
问题描述
假设电压是一个随机变量,服从正态分布,均值为μ,方差为σ^2;随机变量x被两台仪器测量了n次,假设两台仪器的测量误差是正态分布随机变量,均值分别为μ1和μ2,方差分别为σ1^2和σ2^2。计算最小二乘估计(LSE)、加权最小二乘估计(WLS)和线性最小均方误差估计(LMMSE)的μ,以及相应估计的均方误差。让测量方程为:
本文包括以下全部内容。
Basic Kalman Filter、Constant Gain Kalman Filter、Constant Gain Kalman Filter、Forgetting Factor Kalman Filter、Adaptive Kalman Filter、Limited K Reduction Kalman Filter、Extended Kalman Filter、Unscented Kalman Filter、Particle Filter、Federated Kalman Filter、Decentralized Kalman filter、Fuzzy Control、T-S method
研究卡尔曼滤波器及其多个变种是控制理论和信号处理领域的一个重要课题。下面,我将概述您列出的几种滤波器和方法,提供一个基本的理解框架。
### 基本卡尔曼滤波器 (Kalman Filter, KF)
基本卡尔曼滤波器是一种最优估计算法,用于线性动态系统的状态估计。它利用了系统的动态模型、控制输入、测量数据和噪声统计特性来估计系统的当前状态。KF在处理线性系统和高斯误差时表现最佳。
### 常增益卡尔曼滤波器 (Constant Gain Kalman Filter)
这是一种简化的卡尔曼滤波器,它不像标准卡尔曼滤波器那样在每个时间步更新增益,而是使用一个固定的增益。这种方法在某些简单或者资源有限的应用场合中非常有用,尽管牺牲了一些估计精度。
### 遗忘因子卡尔曼滤波器 (Forgetting Factor Kalman Filter, FFKF)
遗忘因子卡尔曼滤波器在卡尔曼滤波的基础上引入了一个遗忘因子,以便更好地适应系统动态的变化。它通过调整遗忘因子来给予最近的观测更大的权重,从而提高在非静态环境中的表现。
### 自适应卡尔曼滤波器 (Adaptive Kalman Filter, AKF)
自适应卡尔曼滤波器能够根据观测到的测量数据动态调整其过程和测量噪声的协方差,以便更好地反映系统的实际情况。这种方法对于处理非线性和非高斯噪声环境下的状态估计非常有效。
### 限制K减少卡尔曼滤波器 (Limited K Reduction Kalman Filter)
限制K减少卡尔曼滤波器通过限制卡尔曼增益的变化,从而减少计算复杂度和提高数值稳定性。这是在一些特定的应用环境中对KF算法的一种改进。
### 扩展卡尔曼滤波器 (Extended Kalman Filter, EKF)
扩展卡尔曼滤波器是基本卡尔曼滤波器的一个变种,用于处理非线性系统。EKF通过在每个时间步上对非线性函数进行线性化(通常使用一阶泰勒级数展开),以便应用KF算法。
### 无迹卡尔曼滤波器 (Unscented Kalman Filter, UKF)
无迹卡尔曼滤波器也是用于非线性系统的另一种方法。与EKF不同的是,UKF使用一组称为sigma points的点来近似概率分布的传播,避免了线性化的过程,通常能提供比EKF更准确的结果。
### 粒子滤波器 (Particle Filter, PF)
粒子滤波器是一种基于蒙特卡罗方法的滤波器,适用于任意概率分布估计,特别适合非线性和非高斯噪声的系统。PF通过一组随机抽样的粒子来表示概率分布,并通过重采样过程来不断更新这些粒子的分布。
### 联合卡尔曼滤波器 (Federated Kalman Filter, FKF)
联合卡尔曼滤波器是一种分布式滤波框架,能够整合来自多个源的信息。它通过将各个子滤波器的估计结果进行合适的加权平均,来提高整体估计的精度和鲁棒性。
### 分散卡尔曼滤波器 (Decentralized Kalman Filter)
分散卡尔曼滤波器在多传感器网络中应用,每个传感器运行自己的卡尔曼滤波器。然后,各个节点之间交换估计信息,以达到全局的最优估计。这种方法减少了计算负担,并可以提高系统的可靠性和容错能力。
### 模糊控制
模糊控制是一种基于模糊逻辑的控制方法,适用于难以使用传统控制方法模型化的复杂或不确定的系统。它通过模糊规则来处理不确定性和近似推理。
### T-S方法
T-S(Takagi-Sugeno)方法是一种模糊建模和控制方法,它通过将系统表达为一组局部线性模型的加权和,来近似复杂的非线性系统。T-S模型特别适用于设计模糊控制器和模糊逻辑系统。
每种方法或滤波器都有其适用场景和优势,选择哪种方法取决于具体的应用需求、系统特性和实现复杂度。
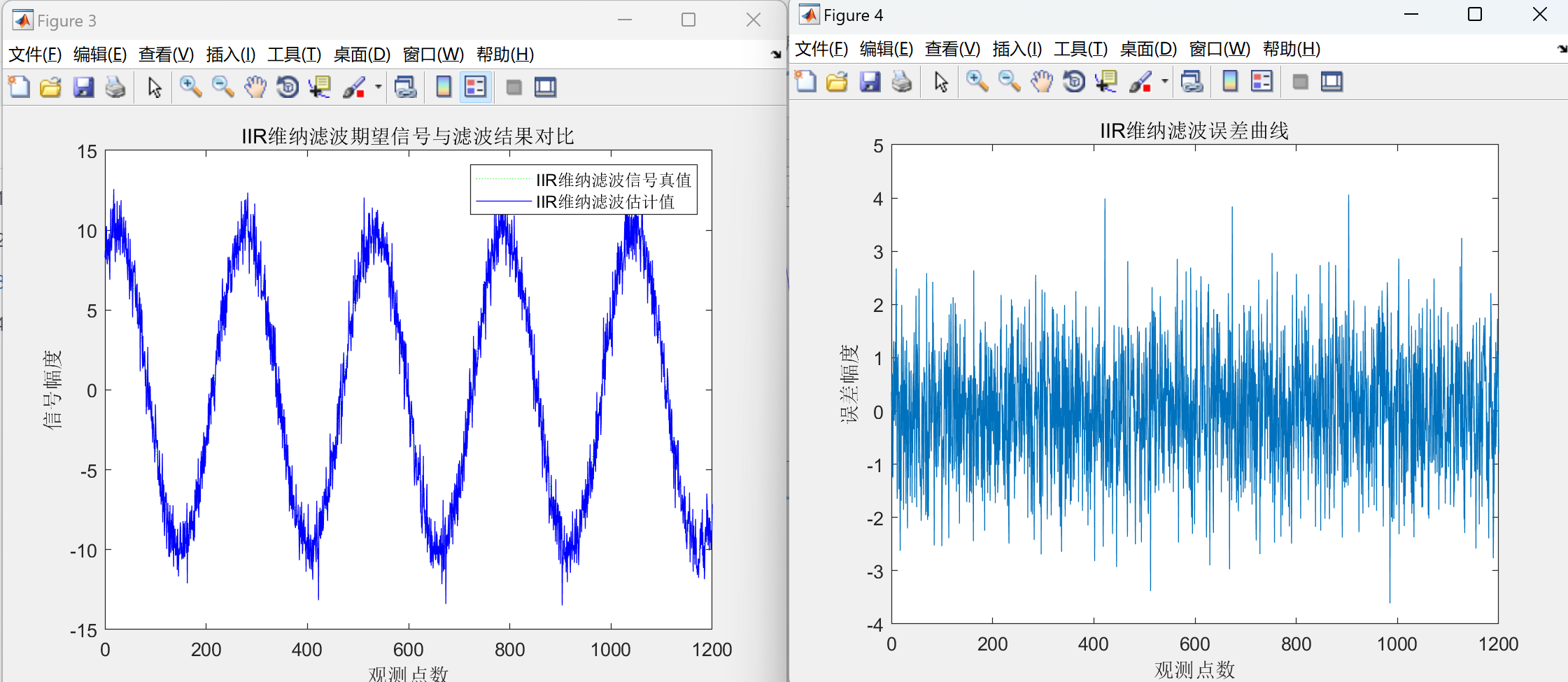
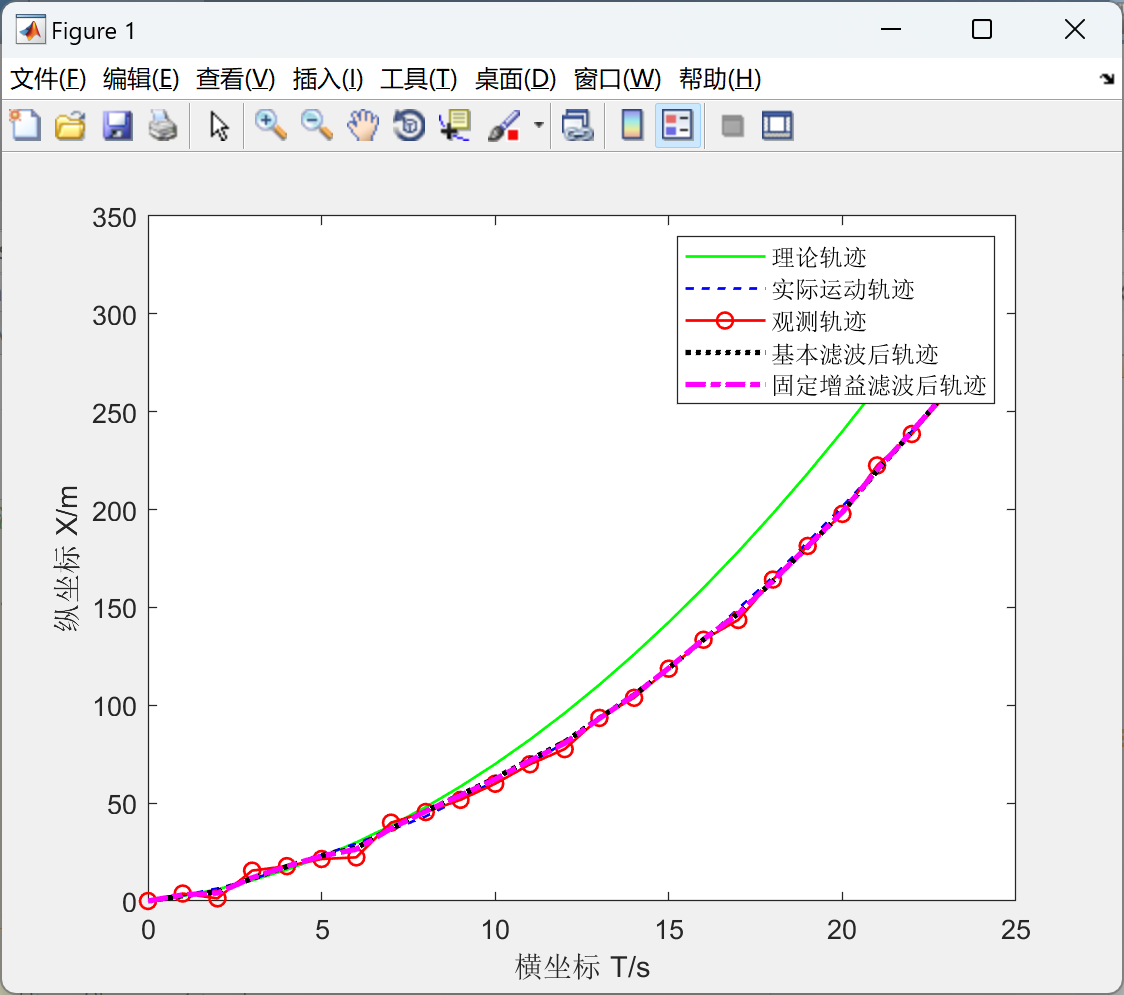
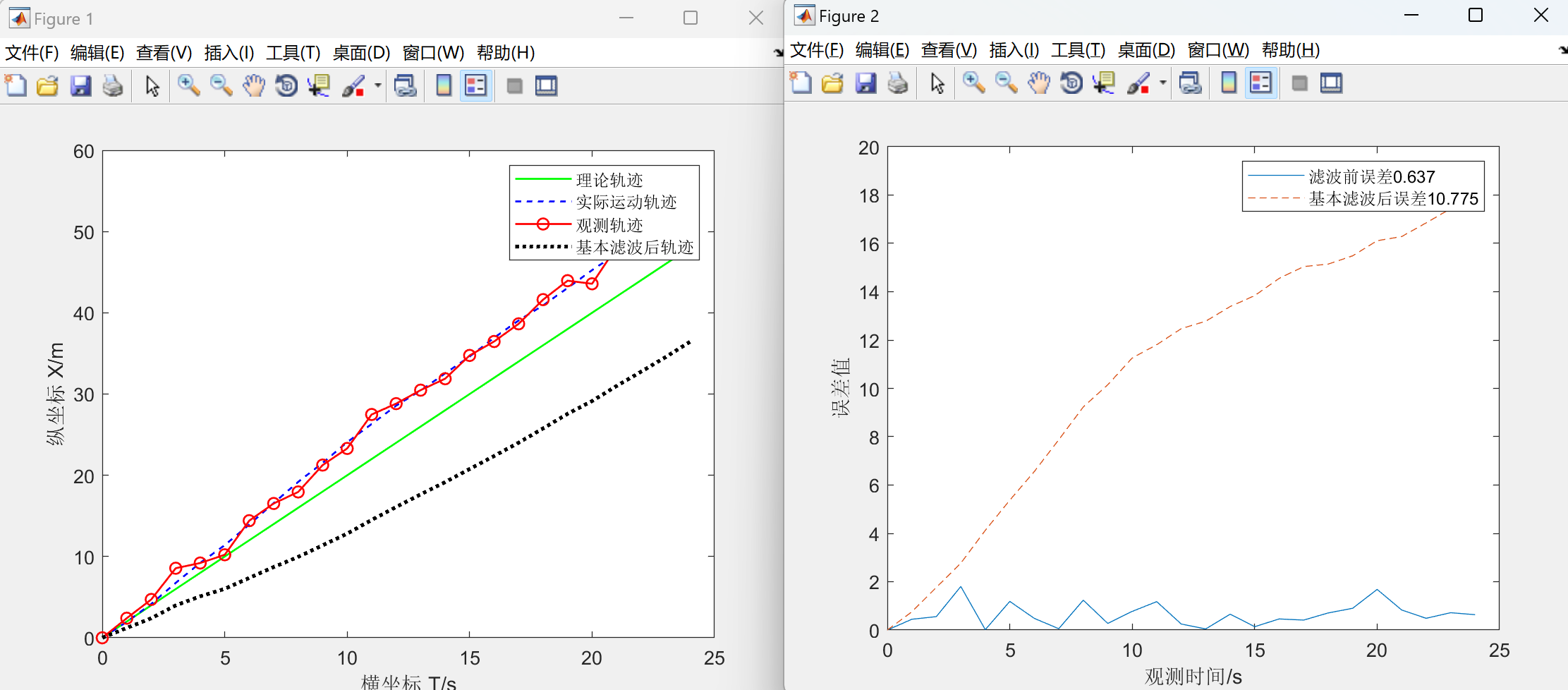
📚2 运行结果



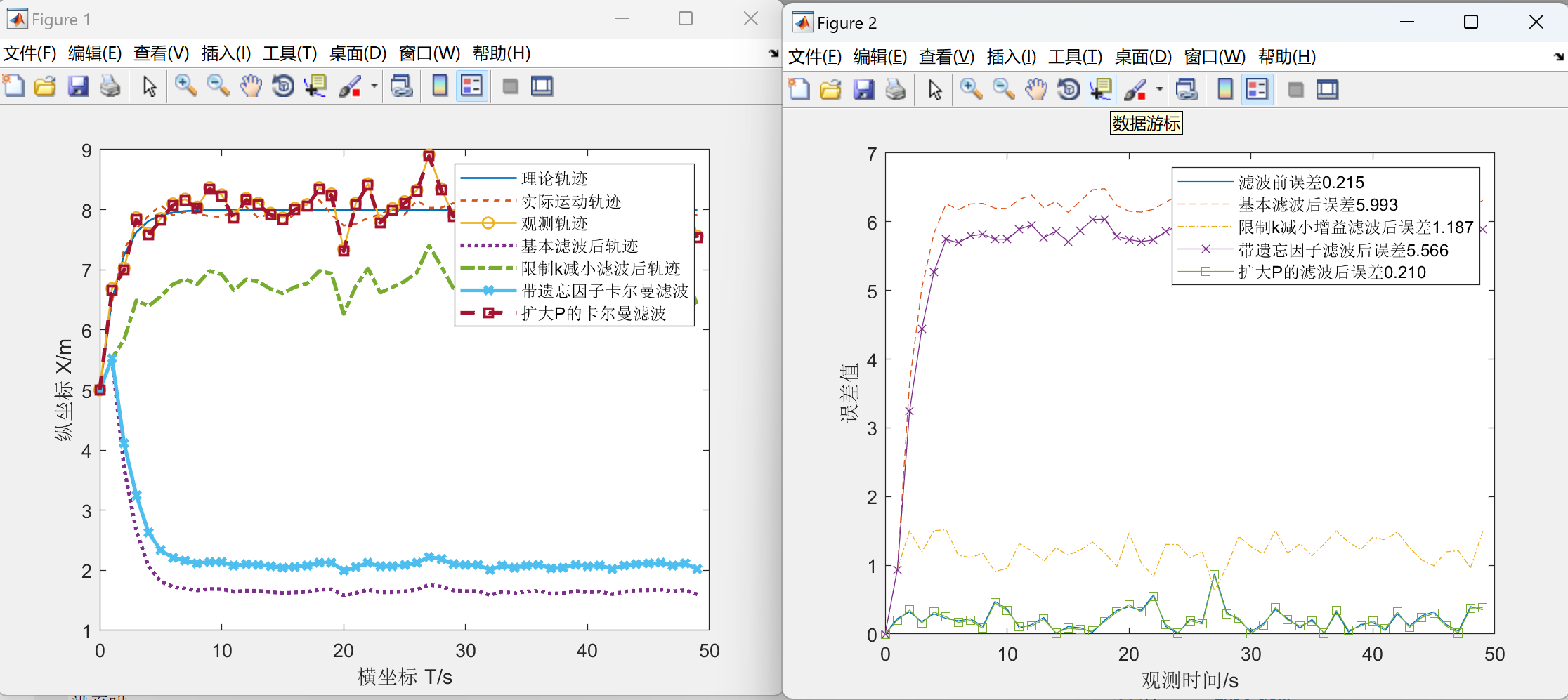
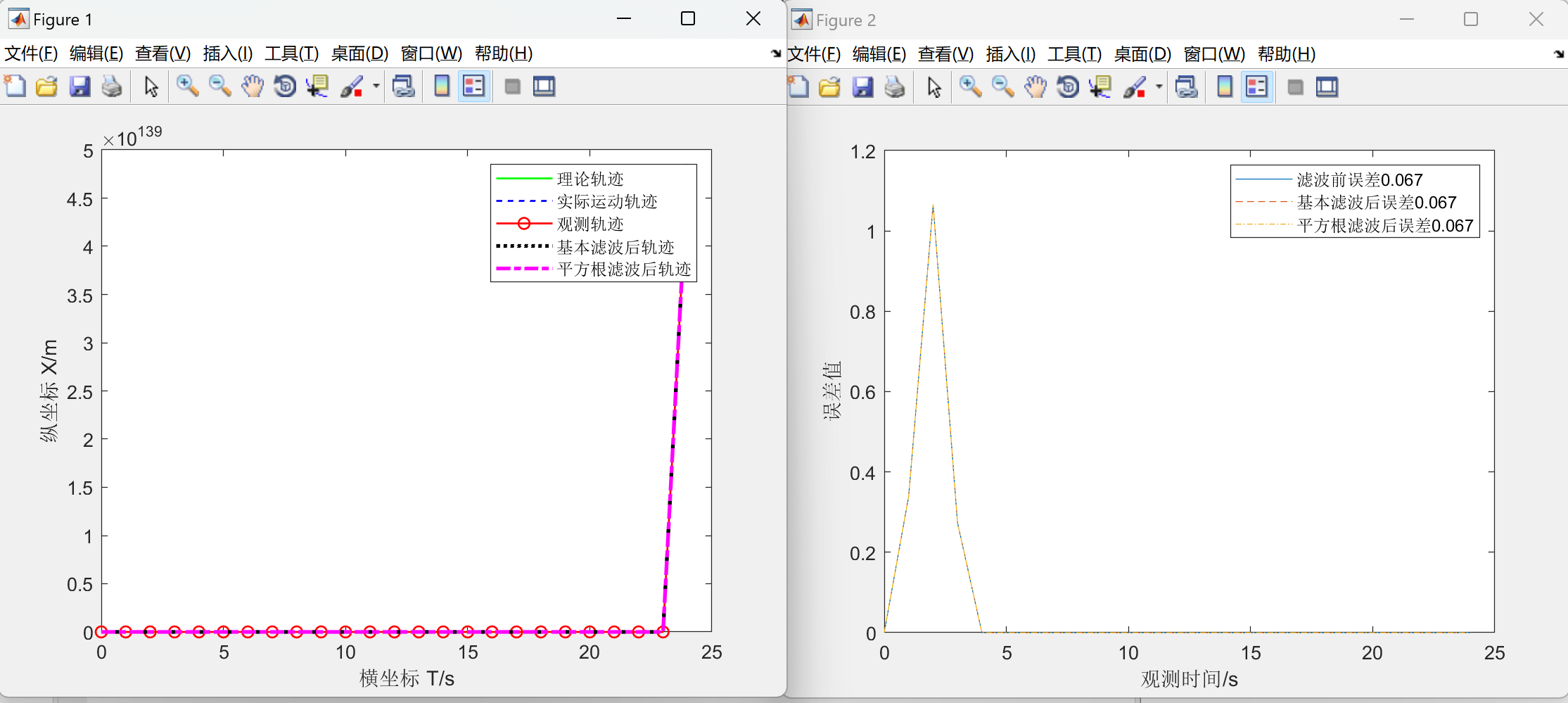
部分代码:
T=1;%雷达扫描周期
N=25/T;%总的采样次数
X=zeros(2,N);%目标真实位置、速度
X(:,1)=[0,2];%目标初始位置、速度
S(:,1)=[0,2];
Z=zeros(1,N);%传感器对位置的观测
Z(:,1)=X(1,1);%观测初始化
delta_w=1e-2; %如果增大这个参数,目标真实轨迹就是曲线了
Q=delta_w*diag([1,1.5]);%过程噪声方差
R=eye(1);%观测噪声均值
phi=[1000000,T;0,1000000];%状态转移矩阵%%%%%% 此处修改
Tau=[T^2/2,0;0,T];
u=[0;0];
W=[1;0];
H=[1,0];%观测矩阵
Xn=zeros(2,0);
Xn_fix=zeros(2,0);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]刘桂辛.基于多传感器信息融合的GPS/DR车载组合导航系统的研究[D].燕山大学,2013.
[2]蒋保睿,刘鹏,肖地波.基于UKF的FADS/INS融合大气数据估计[J].宇航计测技术, 2022(004):042.
[3]王守华,陆明炽,孙希延,等.基于无迹卡尔曼滤波的iBeacon/INS数据融合定位算法[J].电子与信息学报, 2019, 41(9):8.DOI:10.11999/JEIT180748.

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











